
写文章




- @qq_59749958
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
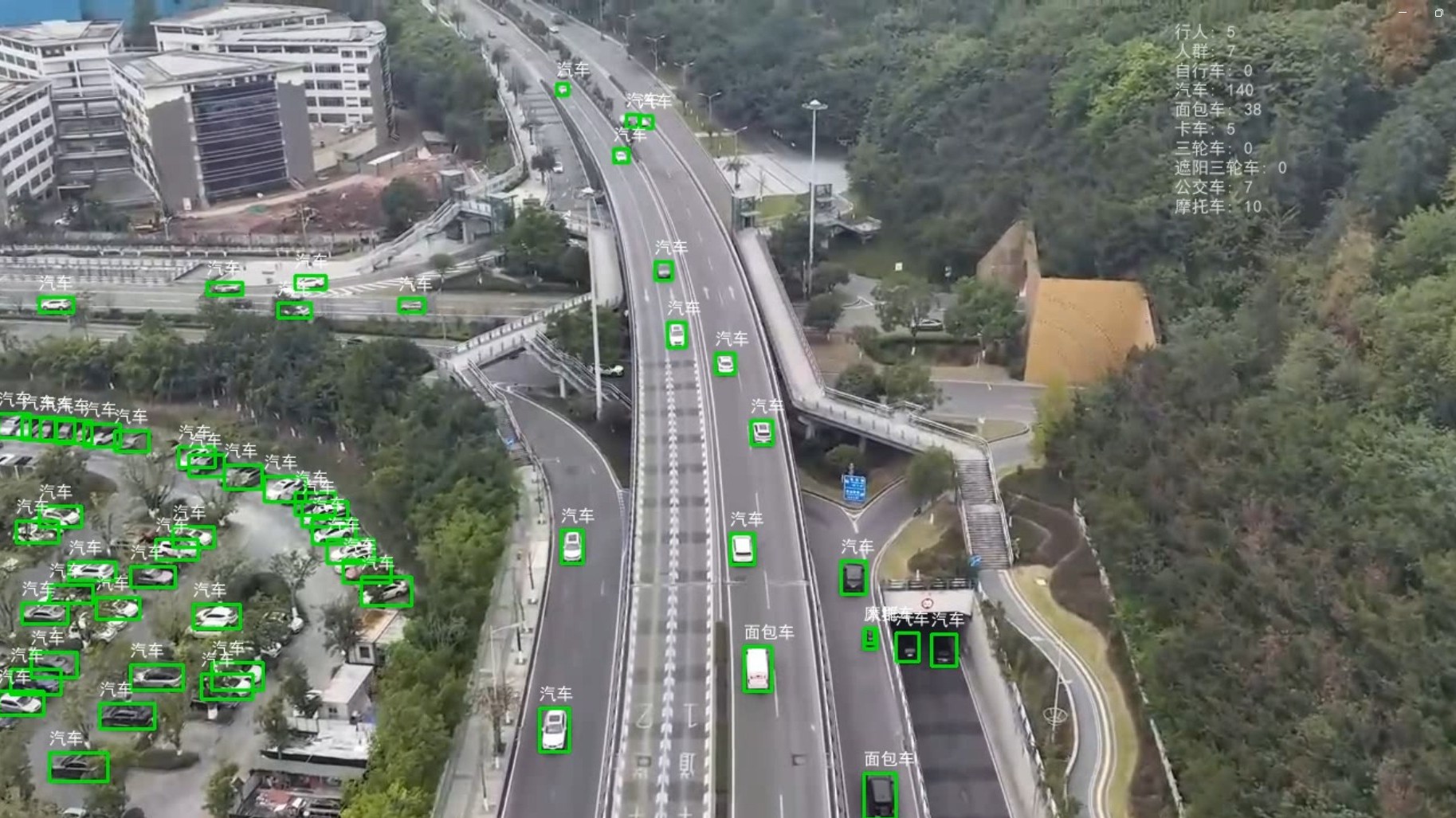
从卡顿到实时——基于RF-DETR模型的无人机视角人车跟踪与计数模型优化实践
面对初期基于YOLO的方案在推理延迟、小目标漏检、计数不准及相机移动干扰等问题,本文探索并实践了多种优化策略,包括引入基于Transformer的RF-DETR模型、视频预处理、目标跟踪算法对比与调优(库简化实现),并通过视频预处理、跟踪器参数精调、探索相机运动补偿以及实施针对性的数据增强策略,我们成功将无人机视角下的人车检测与跟踪计数任务从初期面临严重卡顿和精度问题,实现多线程加载视频帧。)、相
架构实践:用YOLOv11、PaddleOCR与ArcFace构建高并发AI视频违规检测分析系统
在当今的智能化浪潮中,实时视频分析的需求日益增长。本文将详细阐述一个我独立设计并实现的高性能AI视频分析系统的架构。该系统能够从实时RTMP流中,通过多线程并行处理的方式,同时运行YOLOv11(目标检测)、PaddleOCR(文字识别)和ArcFace(人脸识别)三个独立的AI模型,并将检测结果通过WebSocket实时推送,同时利用异步队列将日志信息批量持久化到数据库,有效解决了多模型推理的性
架构实践:用YOLOv11、PaddleOCR与ArcFace构建高并发AI视频违规检测分析系统
在当今的智能化浪潮中,实时视频分析的需求日益增长。本文将详细阐述一个我独立设计并实现的高性能AI视频分析系统的架构。该系统能够从实时RTMP流中,通过多线程并行处理的方式,同时运行YOLOv11(目标检测)、PaddleOCR(文字识别)和ArcFace(人脸识别)三个独立的AI模型,并将检测结果通过WebSocket实时推送,同时利用异步队列将日志信息批量持久化到数据库,有效解决了多模型推理的性
到底了