
写文章




- @qq_54038361
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
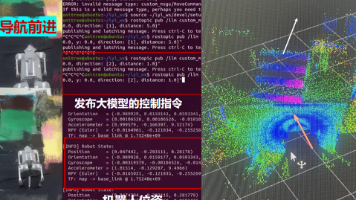
开源!!!!一行代码安装 宇树Go2机器狗 SDK+ros1(感知+定位+规划) 的大模型语言控制导航框架详细教程
本文介绍了基于go2_SDK和ROS1实现的宇树机器狗导航系统。通过改写SDK,实现了ROS1话题(IMU、机器人位姿、雷达)的发布,并构建了支持大模型语言控制的导航框架。系统支持两种导航方式:传统RVIZ目标点导航,以及通过大模型解析文本指令(如方向、距离)实现导航。文章详细说明了SDK安装、例程编译和导航框架部署的步骤,并提供了开源代码(GitHub: qoiu)。大模型部分采用本地知识库或A
到底了