




- @qq_52067567
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
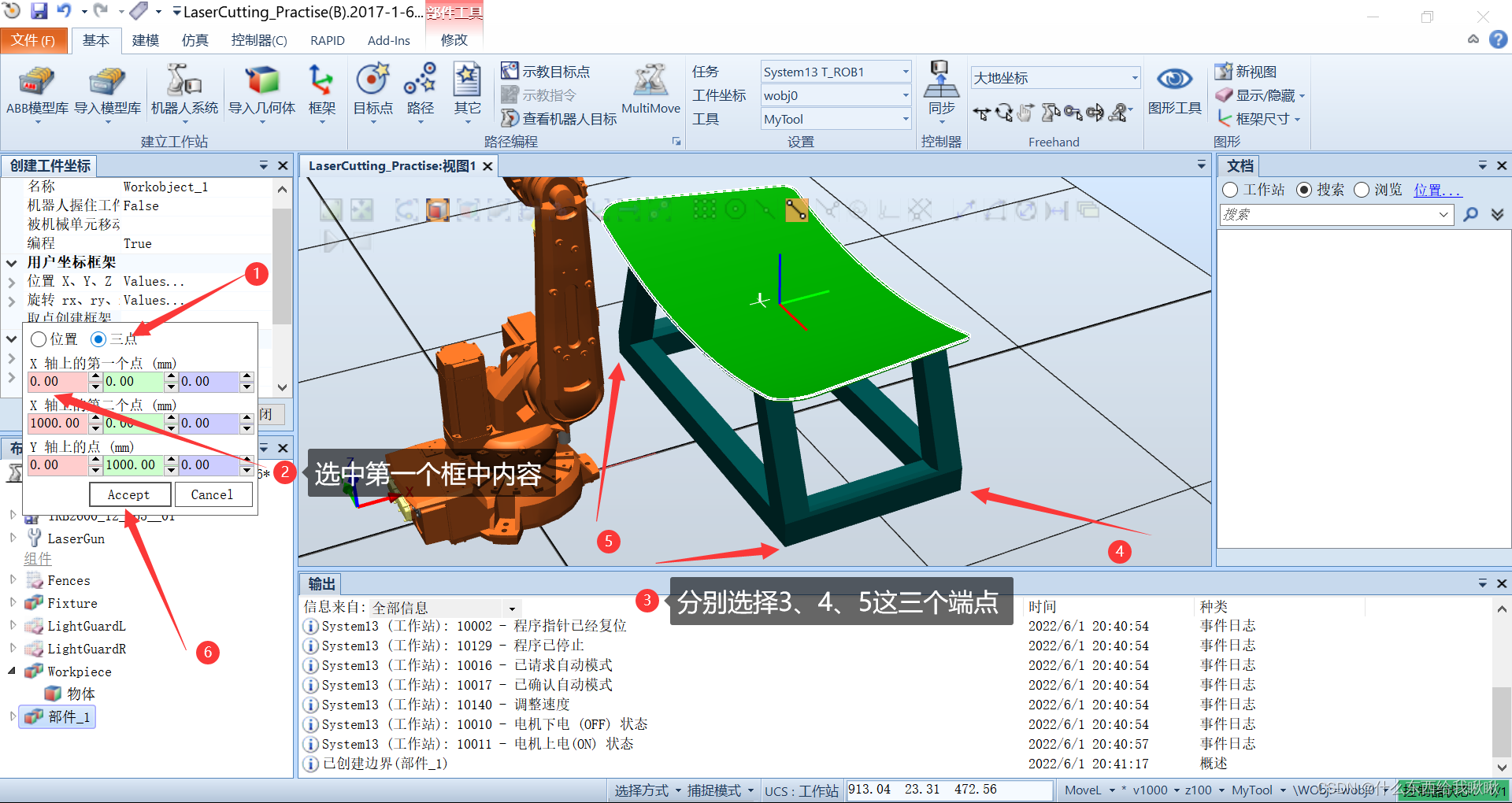
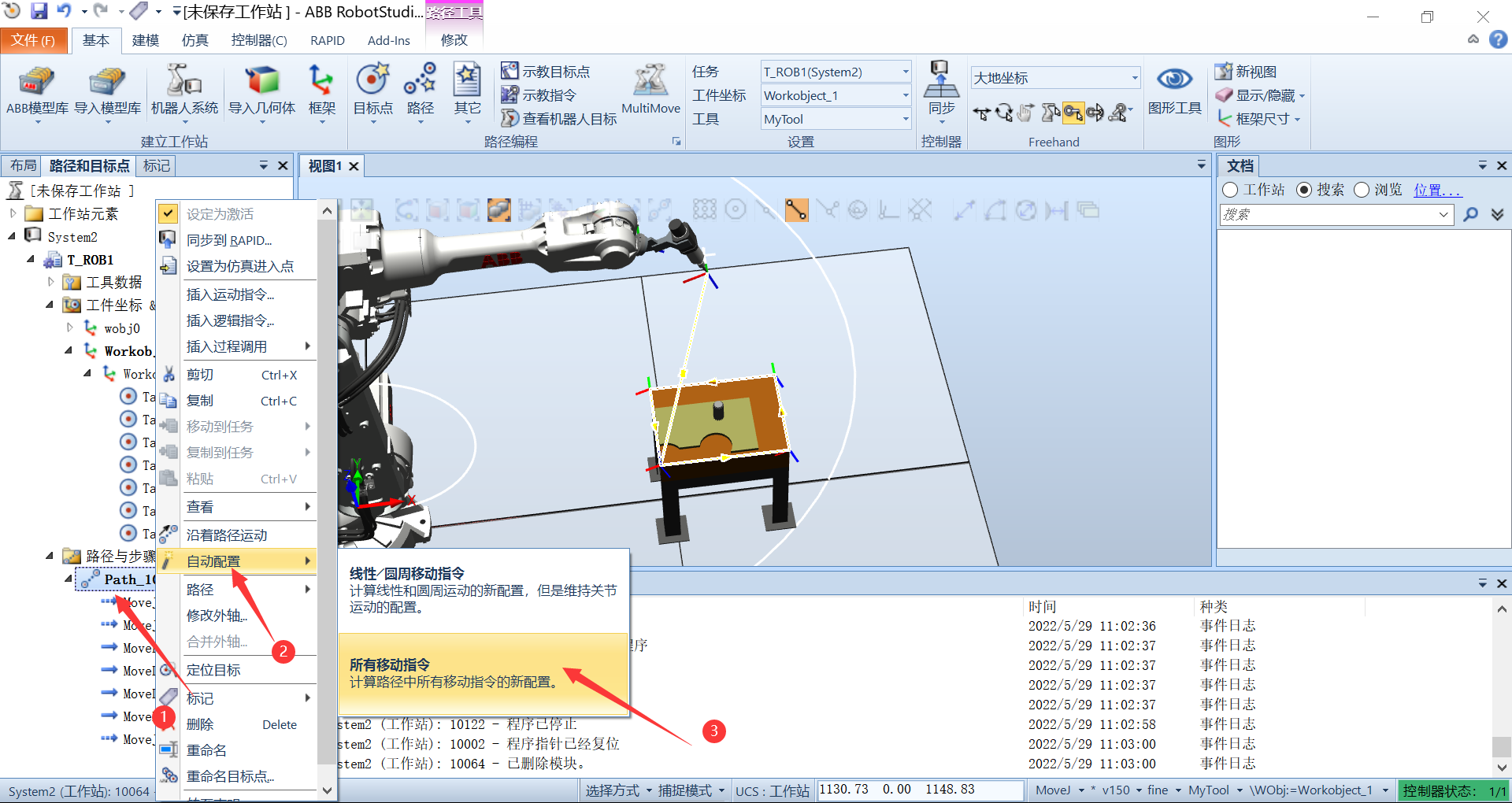
1.学会创建工件的机器人轨迹曲线。2.学会生成工件的机器人轨迹曲线路径。3.学会机器人目标点的调整。4.学会机器人轴配置参数调整。5.了解离线轨迹编程的关键点。6.学会机器人离线轨迹编程辅助工具的使用。...............
程序的调用ProcCall调用例行程序CallByVar经过带变量的例行程序名称调用例行程序RETURN返回原例行程序例行程序内的逻辑控制CompactIF假如条件知足,就履行一条指令IF当知足不一样的条件时,履行对应的程序FOR依据指定的次数,重复履行对应的程序WHILE假如条件知足,重复履行对应的程序TEST对一个变量进行判断,进而履行不一样的程序GOTO跳转到例行程序内标签的地点Label跳
1、在文件功能选项卡中,选择【空工作站】,单击【创建】,创建一个新的工作站。2、在【基本】功能选项卡中,打开【ABB模型库】,选择【IRB2600】。3、设定好数值,然后单击【确认】。4、在【基本】功能选项里,打开【导入模型库】—【设备】,选择【myTool】。5、右键选择【myTool】,然后选择【安装到】,选择【IRB2600_12_165_C_01 0】。6、单击【是】7、工具已安装到机器人
程序的调用ProcCall调用例行程序CallByVar经过带变量的例行程序名称调用例行程序RETURN返回原例行程序例行程序内的逻辑控制CompactIF假如条件知足,就履行一条指令IF当知足不一样的条件时,履行对应的程序FOR依据指定的次数,重复履行对应的程序WHILE假如条件知足,重复履行对应的程序TEST对一个变量进行判断,进而履行不一样的程序GOTO跳转到例行程序内标签的地点Label跳