
写文章




- @qq_48427527
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ROS学习初探之自建小车模型并进行仿真(一)
ROS学习初探之自建小车模型并进行仿真(一)从Solidworks中导出建立好的URDF模型一、下载sw_urdf_exporter插件二、打开创建好的SolidWorks模型三、创建所有link点和坐标系四、创建各个joint的轴线五、使用插件进行配置六、运行文件小结参考文献从Solidworks中导出建立好的URDF模型一、下载sw_urdf_exporter插件本电脑SolidWorks版本
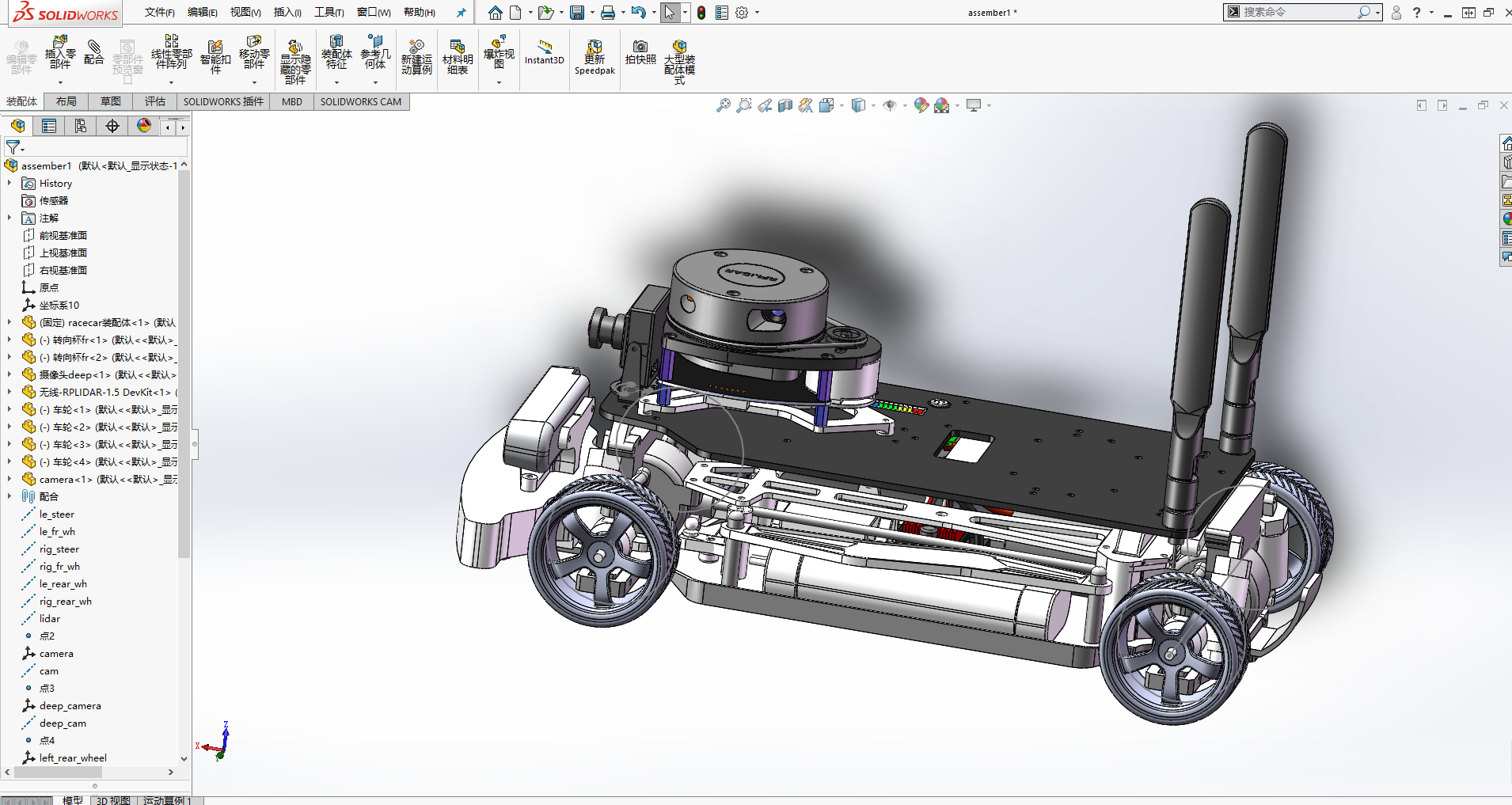
阿克曼结构移动机器人的gazebo仿真(一)
阿克曼结构移动机器人的gazebo仿真(一)第一章、从SOLIDWORKS中导出URDF0.前言二轮差速小车已经完结。接下去要进入阿克曼结构移动机器人的仿真。阿克曼小车的结构也就是我们看到最多的应用最广的车型,也称为car-like robot。在这里先挖下一个大坑,因为要做的东西很多,目前要做的仅仅是让阿克曼小车能够在gazebo仿真器中跑动起来,并且能够进行建图导航即可,后续再对其进行拓展。本
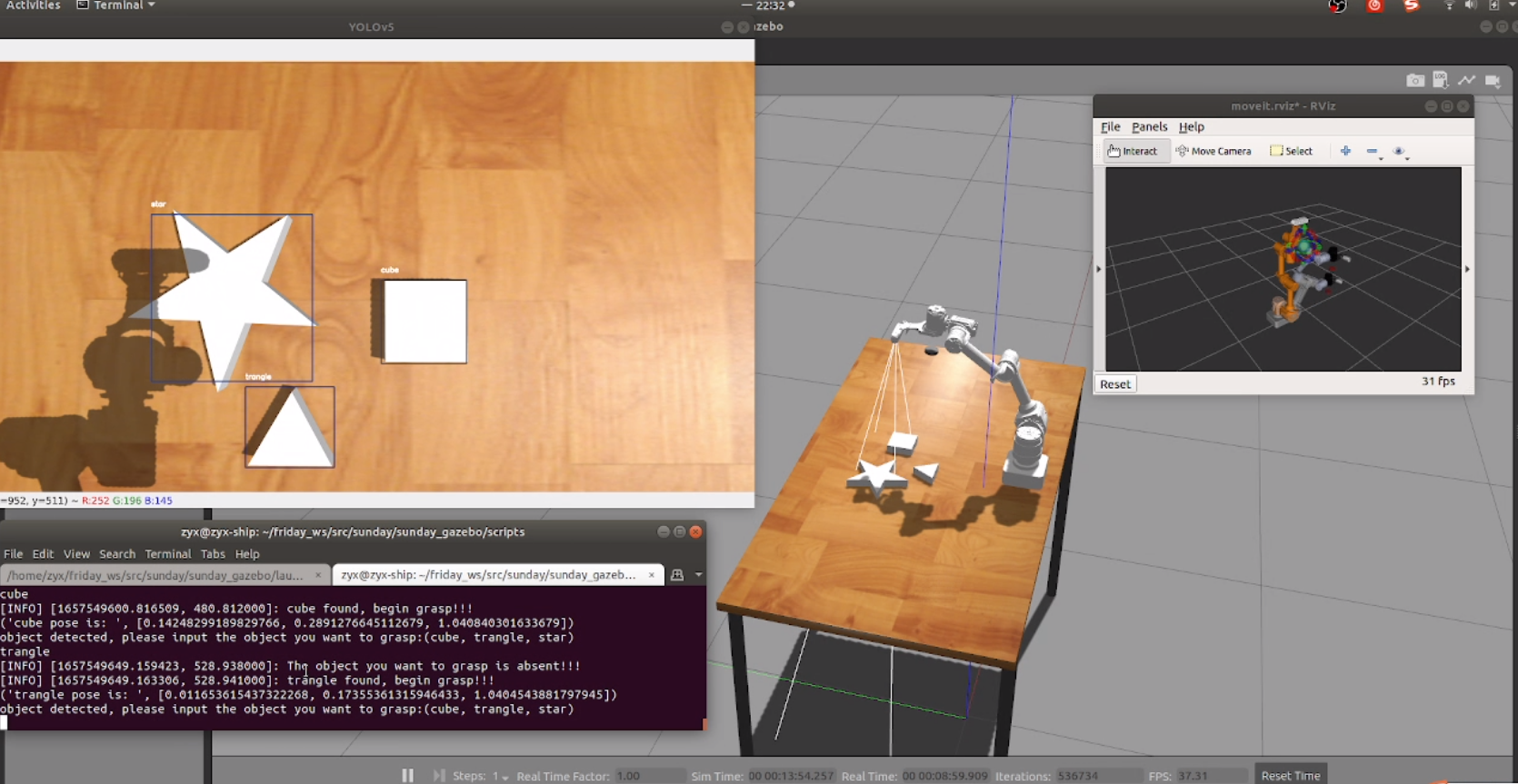
从零开始的机械臂yolov5抓取gazebo仿真(导航贴)
基于yolov5与Moveit!的机械臂拾取的教程导航帖
到底了