
写文章




- @qq_44080282
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
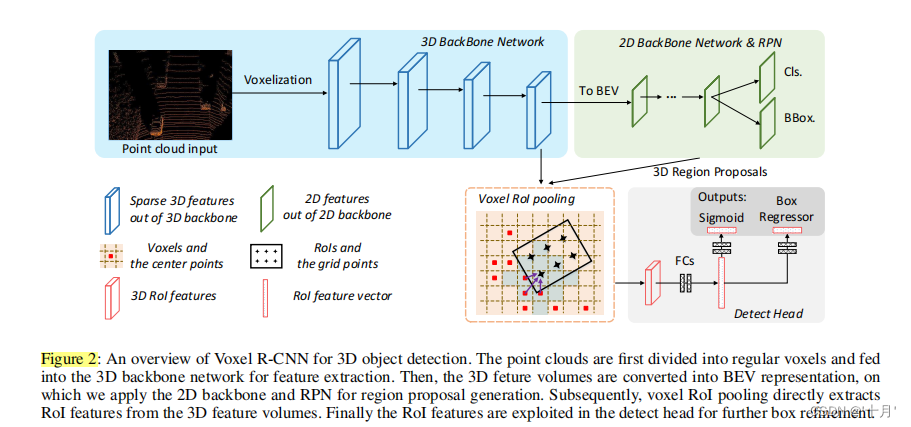
Voxel R-CNN
论文提出了Voxel R-CNN模型,该模型是两阶段3D目标检测模型,基于SECOND以及PV-RCNN模型。论文提出3D点云目标检测大致可以分为基于点的检测方法和基于体素的检测方法,其中基于点的方法有着更高的检测精度,但是速度较慢。基于体素的方法有着较高的检测速度,但是精度较低。模型希望构建在速度和精度方面均衡的模型,达到体素模型的速度以及点模型的精度,因此提出了Voxel-RCNN模型,在SE
到底了