
写文章




- @qq_43547049
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
自动驾驶坐标变换以及NuSences数据集解析
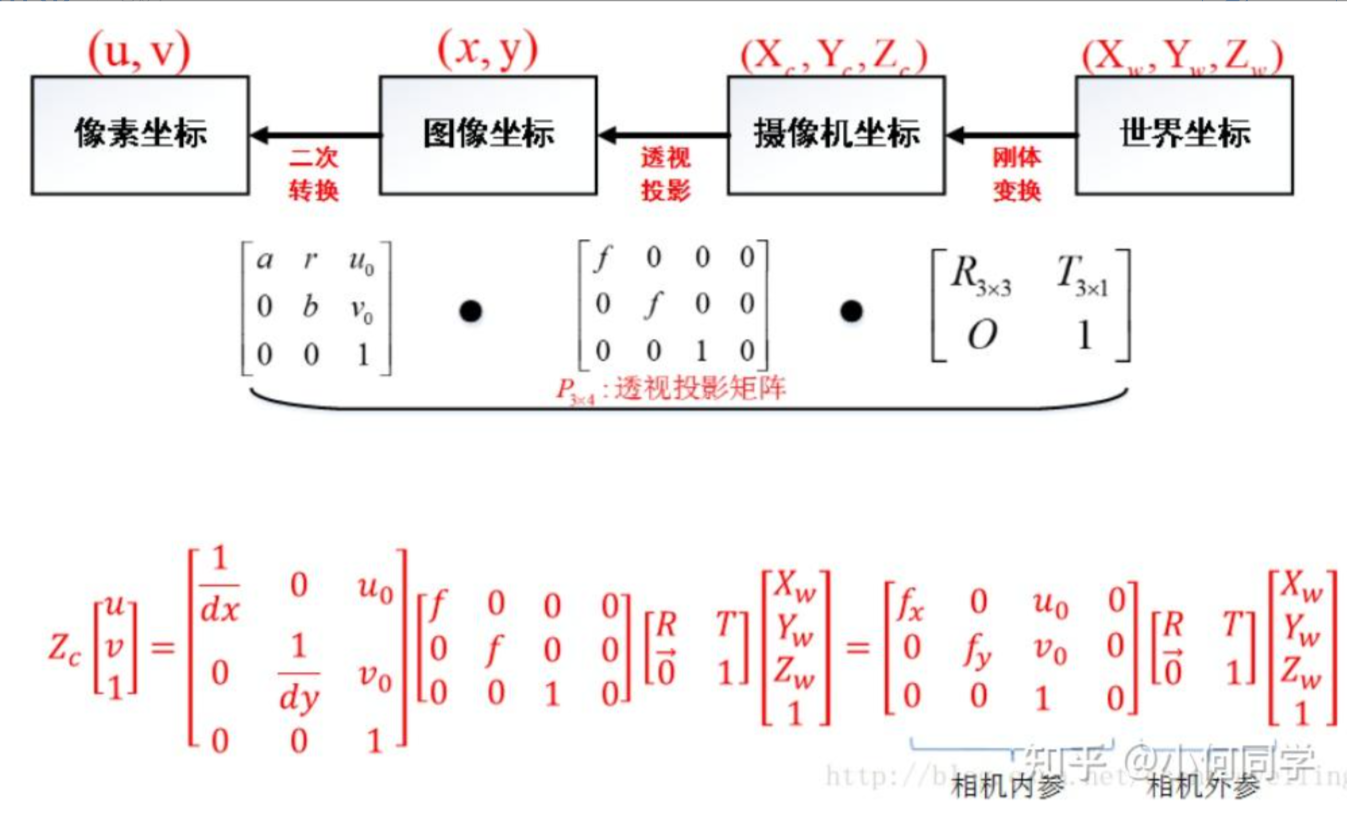
先简单过一遍相机模型中的坐标变换。一点点概念:外参: 物理空间中不同位置的坐标系之间的坐标变换,涉及原点的平移对齐和坐标轴的旋转对齐内参:是诸如相机等传感器内部,由于其本身的特性,导致获得的数据与真实世界有一定的对应关系,为了充分利用不同传感器的数据,需要尽可能将它们统一到相同的格式、坐标系下。从相机坐标系到图像坐标系,属于透视投影关系,从3D转换到2D。也可以看成是针孔模型的改变模型。满足三角形
自动驾驶坐标变换以及NuSences数据集解析
先简单过一遍相机模型中的坐标变换。一点点概念:外参: 物理空间中不同位置的坐标系之间的坐标变换,涉及原点的平移对齐和坐标轴的旋转对齐内参:是诸如相机等传感器内部,由于其本身的特性,导致获得的数据与真实世界有一定的对应关系,为了充分利用不同传感器的数据,需要尽可能将它们统一到相同的格式、坐标系下。从相机坐标系到图像坐标系,属于透视投影关系,从3D转换到2D。也可以看成是针孔模型的改变模型。满足三角形
自动驾驶坐标变换以及NuSences数据集解析
先简单过一遍相机模型中的坐标变换。一点点概念:外参: 物理空间中不同位置的坐标系之间的坐标变换,涉及原点的平移对齐和坐标轴的旋转对齐内参:是诸如相机等传感器内部,由于其本身的特性,导致获得的数据与真实世界有一定的对应关系,为了充分利用不同传感器的数据,需要尽可能将它们统一到相同的格式、坐标系下。从相机坐标系到图像坐标系,属于透视投影关系,从3D转换到2D。也可以看成是针孔模型的改变模型。满足三角形
到底了