- @qq_42759162
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
验证策略不会涉及验证的详细计划,验证计划就是对验证策略进一步详细地阐述,包括详细时间安排、人力需求、TB结构、配置、提取Verification feature并划分优先级、TB局限性分析、reuse组件、 testcases规划、覆盖率和每个阶段验收标准等等,甚至可以包含coding guideline。以下是写验证计划时,需要涉及的一些参考点。可以通过这样的方式描述:通过什么样的输入(inpu
混合专家模型(Mixture of Experts, MoE)是一种模块化的神经网络架构,其核心思想是通过多个“专家”子模型分工协作来解决复杂的任务。每个专家通常是一个独立的神经网络,专注于处理特定类型的输入或任务。例如,在自然语言处理领域,一个专家可能擅长处理语法结构,而另一个专家则更擅长语义理解。门控网络(Gating Network)负责根据输入数据的特性动态分配任务给不同的专家,并决定每个
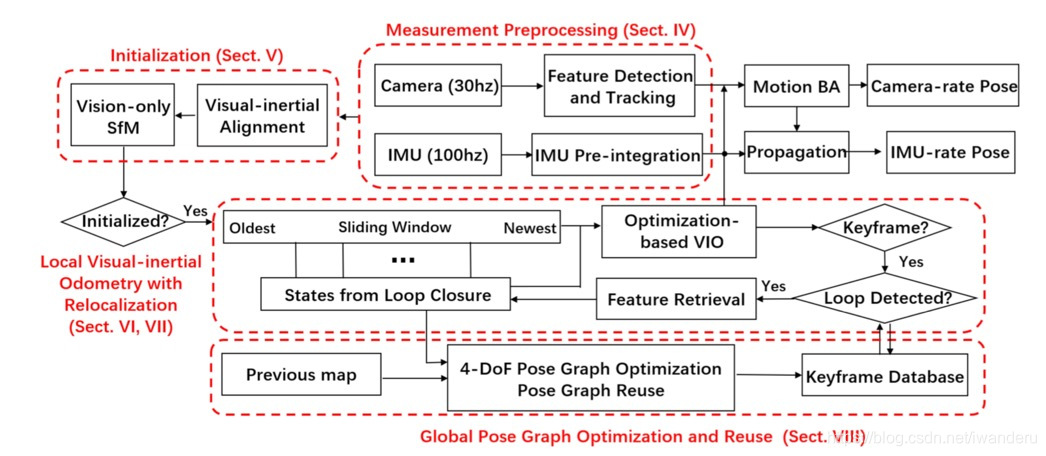
文章目录VINS_Fusion_gpu运行时间测量代码讲解`main()``std::thread`解释示例场景总结`ros::spin()` 函数工作原理回调函数示例代码多个回调函数示例代码并发多个回调函数多线程模式使用 `ros::AsyncSpinner`使用 `ros::MultiThreadedSpinner`总结main函数操作流程加速方法sync_process()`estimato
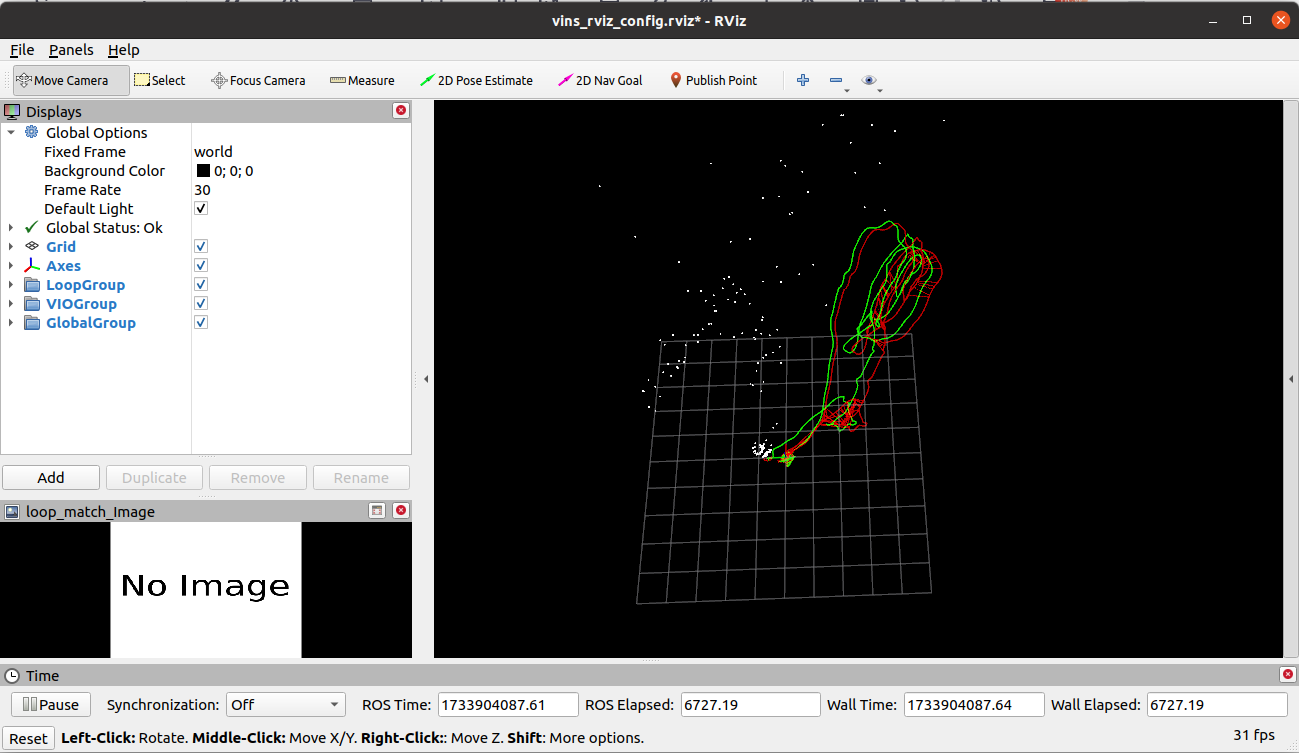
建议你载重装opencv4.6.0之后,将工程目录和工程文件全部删掉重新下载(记得备份,如果不想就删掉上面提到的build和devel,但这有可能还会出错),然后再按照博客中的步骤进行重新搭建环境,应该就不会出现任何问题了。博客2中的工具包括:输入法,jtop,超级终端 terminator,net-tools和openssh-server,这些都是后续工作需要的工具,请大家按照步骤进行安装。,如
从用户的角度来看,当前AI芯片的痛点涵盖了从硬件性能到软件工具链,再到生态系统和成本等多个方面。提供更平衡的通用算力与专用算力组合;简化工具链,提升开发效率;解决内存墙问题,优化数据传输;控制功耗和散热,提升能效比;推动生态系统的统一和标准化;实现推理与训练的融合,支持在线学习;加强安全性和隐私保护;提供更具性价比的产品;推广模块化设计,增强系统的灵活性;加速Chiplet技术的标准化和应用。

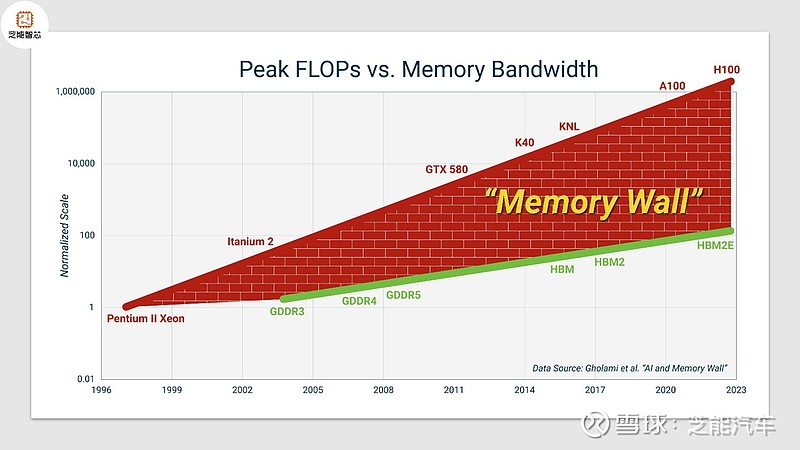
以下是AI芯片中各种“墙”的含义及解决方式:一般看来,内存墙和存储墙都是混用的,都是指芯片内部存储单元和计算单元物理上分离,致使数据在二者之间传输的带宽和时延成本极高,AI 算法处理大规模数据时,面临内存访问瓶颈、算力利用率低下等问题.
IC Compiler,简称ICC,是Synopsys新一代布局布线系统(Astro是前一代布局布线系统),通过将物理综合扩展到整个布局和布线过程以及Sign off驱动的设计收敛,来保证卓越的质量并缩短设计时间。上一代解决方案由于布局、时钟树和布线独立运行,有其局限性。IC Compiler的扩展物理综合(XPS)技术突破了这一局限,将物理综合扩展到了整个布局和布线过程。IC Compiler采
含义:指示系统对外参的处理方式。取值:0:已经准确知道外参,信任提供的外参矩阵,不会对其进行优化。1:有一个初始估计的外参,系统会在该初始估计的基础上进行优化。2:完全不知道外参,系统会尝试从数据中自动校准外参。在这种情况下,不需要提供外参矩阵,但需要在开始时做一些旋转运动以帮助校准。含义:从相机坐标系到IMU坐标系的旋转矩阵。格式:3x3 矩阵。!rows: 3cols: 3dt: d含义:从相