




- @qq_42406643
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
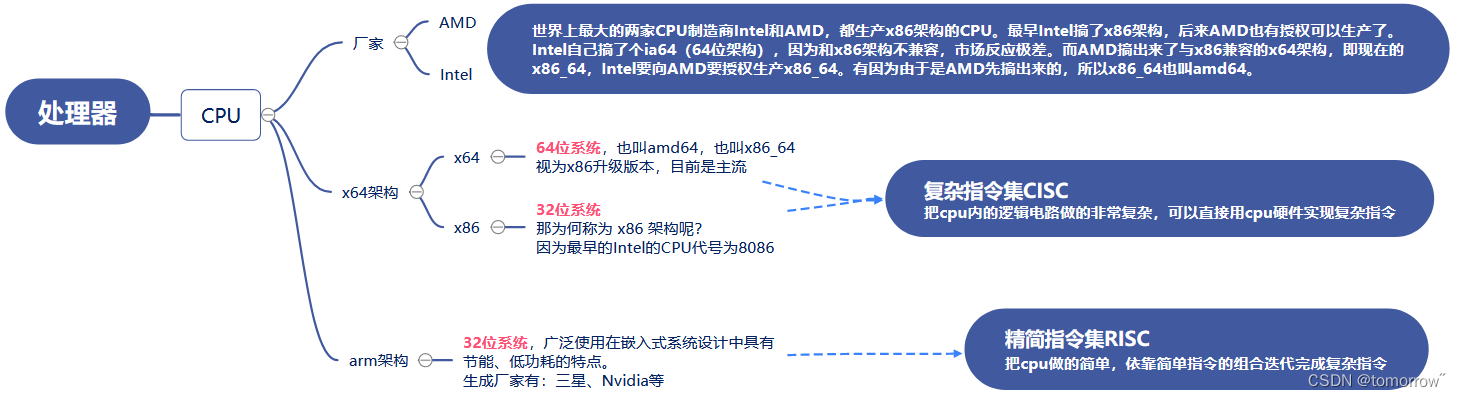
ARM、MIPS、PowerPC 均是基于精简指令集RISC机器处理器的架构X86是基于复杂指令集的架构,Atom则基于是x86指令集的精简版ARM架构ARM架构,过去称作进阶精简指令集机器(Advanced RISC Machine,更早称作:Acorn RISC Machine),是一个32位精简指令集(RISC)处理器架构,其广泛地使用在许多嵌入式系统设计。由于节能的特点,ARM处理器非常适
代价地图的参数详解关键词:局部路径规划,代价地图costmap、膨胀区……
在ROS中,进行导航需要使用到的三个包是:(1) move_base:根据参照的消息进行路径规划,使移动机器人到达指定的位置;(2) gmapping:根据激光数据(或者深度数据模拟的激光数据)建立地图;(3) amcl:根据已经有的地图进行定位。move_base,它接收了地图数据等,通过代价地图等进行路径规划AMCL,通过已有的数据进行定位...
最优化问题可以分为两大类:无约束最优化问题、约束最优化问题。本文对一些算法进行总结,如黄金分割法、最速下降法(梯度下降法)、牛顿法、阻尼牛顿法、拟牛顿法、共轭方向法……包含matlab代码资源
GPU显卡是我们平时说的GPU,现在大多数的电脑使用NVIDIA公司生产的显卡;常见的型号有Tesla V100,GTX950M,GTX1050TI,GTX1080等。CUDA Driver这个是我们常说的显卡驱动,NVIDIA的显卡驱动程序。CUDA是显卡厂商NVIDIA推出的运算平台。CUDA™是一种由NVIDIA推出的通用并行计算架构,是一种并行计算平台和编程模型,该架构使GPU能够解决复杂