- @qq_41538165
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
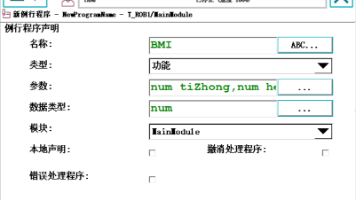
本文介绍了RAPID编程中的功能程序(FUNC),重点说明了其特点和使用方法。FUNC是一种带有返回值的程序类型,主要用于数值计算、逻辑判断和数据处理,与常规程序(PROC)相比具有明确返回值且不直接控制机器人运动。文章详细对比了两者的区别,阐述了FUNC的语法结构、调用方式以及实际应用场景(如状态判断、偏移计算等),并给出了编程注意事项,强调了FUNC在提高代码复用性和可读性方面的优势。最后指出
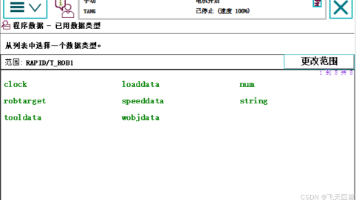
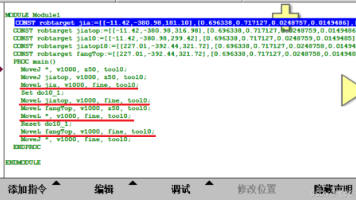
RobTarget是ABB机器人编程中的核心数据类型,用于存储运动目标点信息。它包含四部分数据:1) XYZ空间坐标(毫米单位);2) 四元数表示的工具姿态;3) 关节构型配置数据;4) 外部轴位置(未使用时默认9E9)。通过示教或程序数据菜单可创建RobTarget变量,配合MoveJ/MoveL等指令实现轨迹控制。该数据类型能完整描述目标点的空间位置、工具朝向及机器人运动状态,是轨迹规划的基础
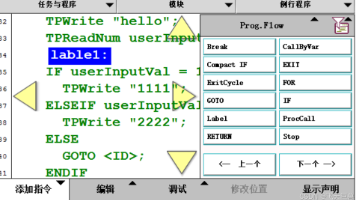
本文介绍了ABB RAPID编程中常用的流程控制和人机交互指令。详细讲解了FOR循环(适用于已知循环次数)、WHILE循环(适用于未知循环次数)的使用方法和应用场景,并对比了两者的区别。同时介绍了BREAK、EXIT、IF条件判断、GOTO跳转、TEST多分支判断等流程控制指令,以及TPErase、TPWrite、TPReadNum等示教器交互指令的功能和语法。这些基础指令可用于实现循环搬运、阵列
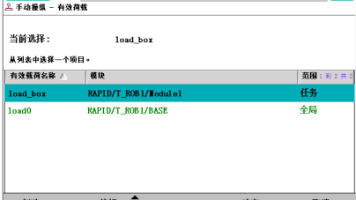
摘要: 有效载荷(Payload)指机器人末端承载的总重量(工具+工件),正确设置可提升运动精度和稳定性。操作包括输入质量参数或通过代码指令(如GripLoad)。工件坐标(WorkObject)是以工件为基准的坐标系,工件位置变动时只需更新WObj数据,无需重新示教路径,适用于多工位加工、焊接等场景。关键点:载荷需随工具/工件变化及时调整,WObj简化了工件位置变更后的程序适配。
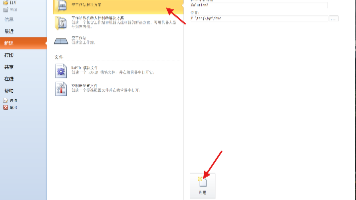
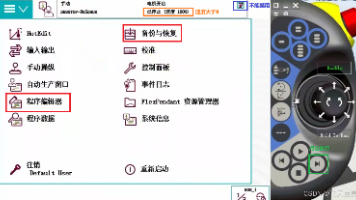
本文介绍了ABB工业机器人程序开发的基本流程:1)备份原有模块以防误操作;2)新建Program类型模块;3)在模块内创建例行程序;4)编写RAPID程序代码并调试。强调了备份的重要性,区分了Program和System模块的用途,提醒初学者谨慎修改系统模块。建议每次修改前备份,运行前调试检查程序逻辑和运动轨迹。掌握这四个步骤(备份→新建模块→创建例行程序→编写代码)即可开始机器人编程学习。
摘要: ZoneData控制机器人运动到目标点的精度与流畅性,如fine(精确停止,用于焊接等)、z10(提前转弯,提升搬运效率)。ABB机器人的MoveJ(关节运动,快速非直线)适合空程移动,MoveL(直线运动,精度高)适用于焊接、装配等工艺。选择依据:效率优先用MoveJ,轨迹精度要求高用MoveL,并根据任务调整ZoneData值以平衡速度与精度。调试时建议先用fine确保路径正确,再优化
摘要:本文介绍RobotStudio软件安装及基础操作流程,包括创建工作站、导入IRB120机器人模型、建立控制系统(选择RobotWare和中文选项)、启动虚拟示教器。详细说明手动模式启用步骤(Enable键激活电机)和机器人运动控制方法,并提供视角调整快捷键(Ctrl+Shift+左键旋转/Ctrl+左键平移/滚轮缩放)。该环境搭建为后续RAPID编程和机器人仿真开发奠定基础。(149字)