




- @qq_39764867
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
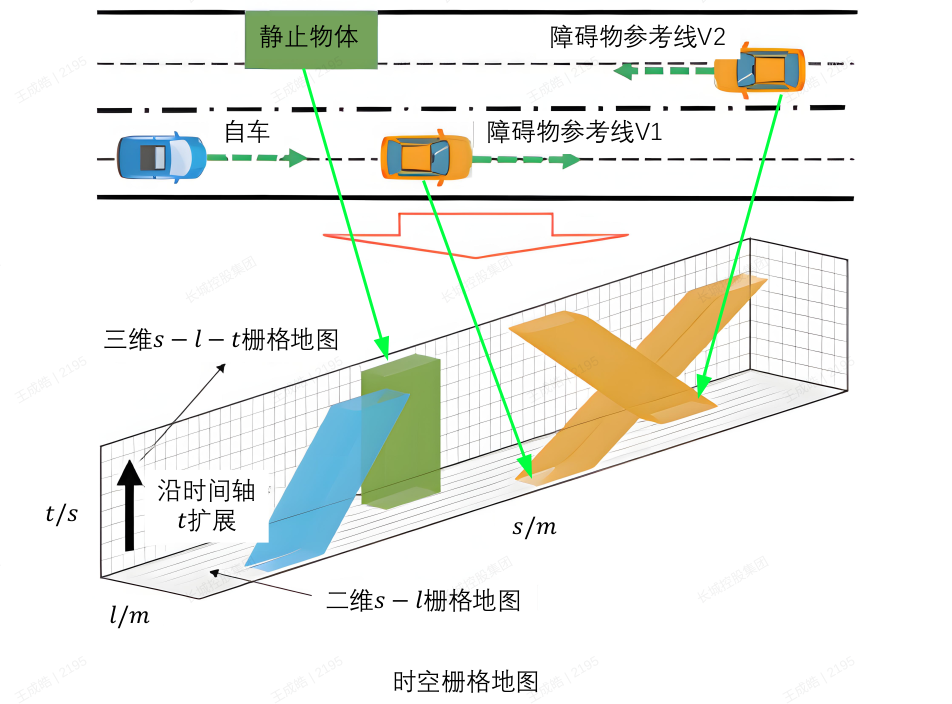
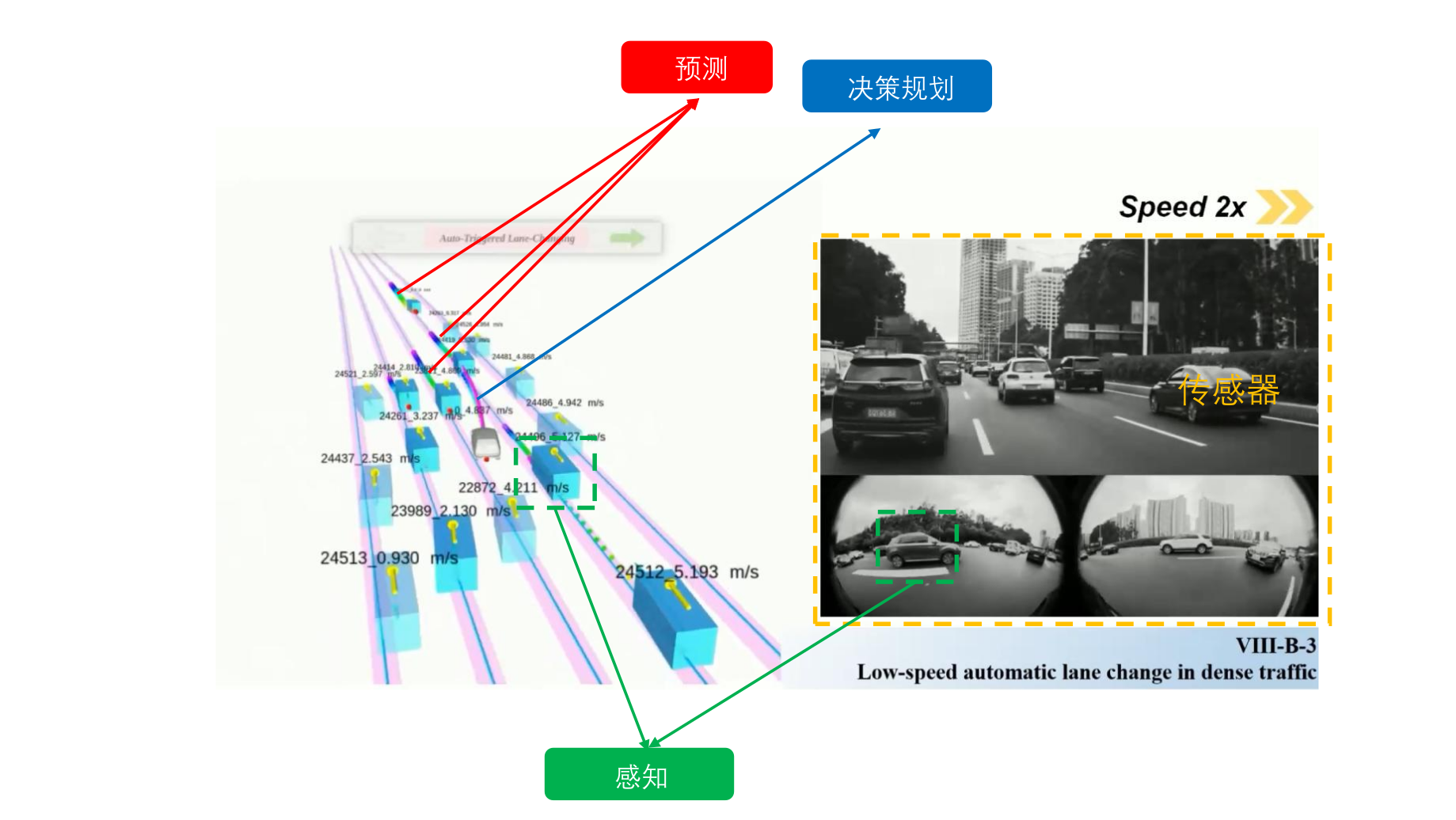
李仁杰,轻舟智航规划算法负责人,自动驾驶决策与规划技术专家。在自动驾驶系统中,决策规划模块用于解决车辆“怎么走”的问题。与业界惯用的时空分离算法不同,轻舟智航采用时空联合规划算法,同时在空间和时间维度求解最优行车轨迹,得到更加舒适、安全、拟人的驾驶行为。总体介绍。

1. 时空联合规划的基本概念2.基于搜索的时空联合规划 (Hybrid A* )3.基于迭代计算的规划方法4.基于时空走廊的时空联合规划方法
0、前言1、自动驾驶概述1.1预测(Prediction)1.2 决策(Decision Making)1.3 规划(Planning)2、自动驾驶历史和背景3、自动驾驶级别和分类4、预测决策规划的重要性4.1 预测的重要性4.2 被遮挡的车辆(occluded agents)的处理1. 基于感知的预测(Perception-Based Prediction)2. 基于运动的预测(Motion-B
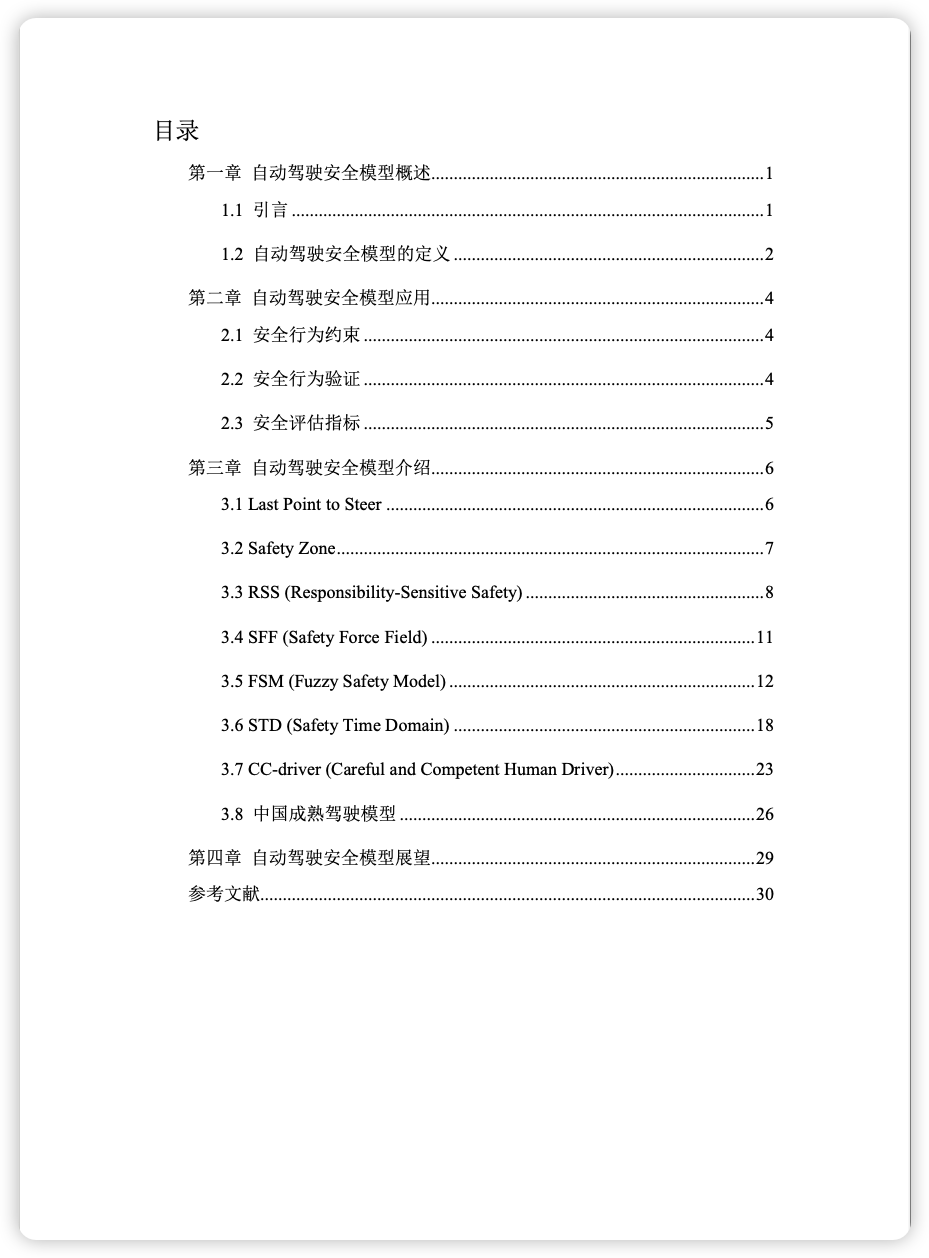
自动驾驶安全模型研究 自动驾驶安全模型研究 自动驾驶安全模型研究1.自动驾驶安全模型概述2. 自动驾驶安全模型应用3. 自动驾驶安全模型介绍3.1 Last Point to Steer3.2 Safety Zone3.3 RSS (Responsibility-Sensitive Safety)3.4 SFF (Safety Force Field)3.5 FSM (Fuzzy Safety M
《C-NCAP管理规则(2021年版)》已于2020年8月25日正式发布,并将于2022年1月1日正式实施。CNCAP2021版主动安全部分主要更新了如下内容:增加了车辆自动紧急制动系统(AEB)的试验场景;增加了车道保持辅助系统(LKA)试验及评价方法;增加了对于车道偏离报警系统(LDW)、盲区监测系统(BSD)、速度辅助系统(SAS)的审核项目及技术要求;增加了整车灯光性能试验及评价方法;修改