
写文章




- @qq_33253718
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
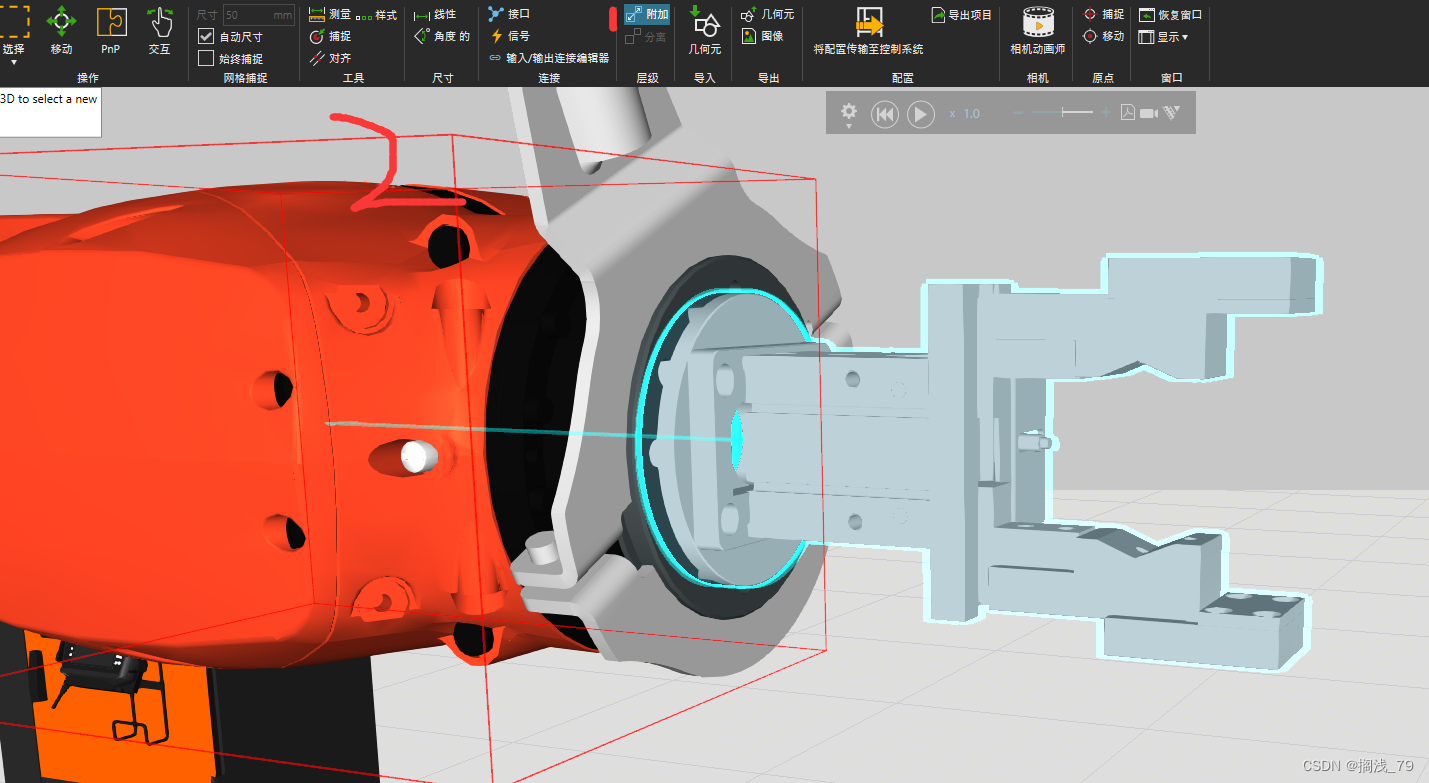
Simpro4.1环境下实现KUKA机器人与末端执行器联动仿真
导入机器人与控制柜模块,再导入夹具末端,(.路径:\39062源文件\39062源文件\3D模型文件\夹具工具.IGS)在开始界面下选中夹具,选择:开始>操作>PnP,点击“工具>捕捉”将夹具固定在机器人末端法兰面,设置角度对齐。点击“层级>附加”,将夹具与A6轴绑定。此时夹具能跟随机器人运动。
C# VS海康SDK二次开发踩坑之“无法加载 dll“mvcameracontrol.dll”: 找不到指定的模块。
下载安装完成后按照这个路径打开文件夹\\MVS\Development\Samples\C#(你的mvs安装目录),用VS打开这个叫“CSharpDotNetSamples_VS2008”的文件。作为小白我也是跟着某站的视频课入门,下载了海康官方提供的MVS,附上。弹出了这个提示(由于我的问题解决了就找不到自己的图了借鉴了这个。我好奇的点击“启动”按钮等待惊喜的到来,然后我就忙了一个半小时。如果有

C# VS海康SDK二次开发踩坑之“无法加载 dll“mvcameracontrol.dll”: 找不到指定的模块。
下载安装完成后按照这个路径打开文件夹\\MVS\Development\Samples\C#(你的mvs安装目录),用VS打开这个叫“CSharpDotNetSamples_VS2008”的文件。作为小白我也是跟着某站的视频课入门,下载了海康官方提供的MVS,附上。弹出了这个提示(由于我的问题解决了就找不到自己的图了借鉴了这个。我好奇的点击“启动”按钮等待惊喜的到来,然后我就忙了一个半小时。如果有
到底了