




- @qq_31441951
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
广度优先搜索算法,简称BFS(Breadth-First Search),是一种图搜索算法。它从起始节点开始,依次遍历与起始节点相邻的节点,然后依次遍历与这些节点相邻但尚未访问的节点,直到遍历完所有与起始节点连接的节点。BFS的优点是能够找到最短路径。当需要找到两个节点之间的最短路径时,可以使用BFS来解决。它也适用于无权图的遍历,以及寻找图中的连通分量和环的问题。

一、重要参数雷达主体由激光测距模组和电机构成,雷达主体需要连接转接板,用于实现外部供电和UART转USB。以ydlidar-x4激光雷达为例。ydlidar-x4激光雷达正是一款极低成本的2D激光雷达,作为学习性能足够用了。测距频率:指每秒钟测距的次数(即激光测距模组的采样率),测距频率默认为5KHz;扫描频率:扫描频率越高,电机转动一圈的时间约短,扫描获取1帧雷达数据的时...
执行指令:sudo apt-get install ros-kinetic-usb-camroslaunch usb_cam usb_cam-test.launch系统报错:[ERROR] [1575905480.653251919]: Cannot identify '/dev/video0': 2, No such file or directory解决思路:首先...
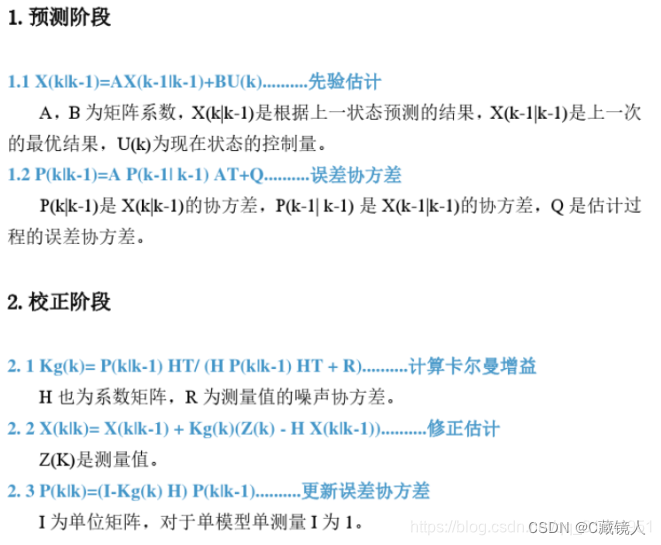
状态方程是描述某个物理系统状态随时间变化的数学表达式。它通常是以微分方程或差分方程的形式表示,并描述系统的状态变量随时间的变化。状态方程可以用来预测系统未来的状态或根据已知的状态预测系统的过去状态。观测方程是用于描述一个物理系统的状态变量与实际可观测量之间关系的数学表达式。它通常是以代数方程或非线性方程的形式表示,将系统的状态变量转换为实际测量值。观测方程是用来确定系统的状态变量,常用于控制系统、
机器人学的核心问题是做好和物理世界的交互。现在主流的机器人学分支里,处理与物理世界的交互的学科分为三类:传感器和处理算法;多刚体系统动力学控制;机器人自主移动。 智能机器人会成为未来世界的灾难吗?对机器人或人工智能的研究会帮助我们更好的了解人类自己吗?人工智能将会怎样影响我们的生活?诸如此类的问题及文章...