
写文章




- @oisflo
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
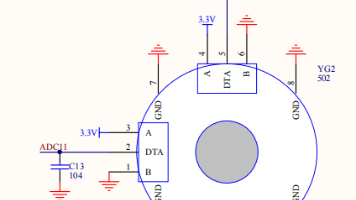
入门级STM32F103C8T6无人机遥控(原理图)
STM32主控系统电路设计核心解析 摘要:本文详细解析了基于STM32的嵌入式系统电路设计,包括六大核心模块: 主控电路:涵盖电源、时钟、复位三大基础电路设计要点 通信接口:USB/串口通信和SWD程序烧录电路实现原理 外设驱动:蜂鸣器三极管驱动、LED指示灯和按键检测电路 信号处理:电压测量分压电路与SPI接口OLED显示方案 无线通信:NRF24L01模块的SPI接口电路及滤波设计 电源管理:
入门级STM32F103C8T6无人机遥控(原理图)
STM32主控系统电路设计核心解析 摘要:本文详细解析了基于STM32的嵌入式系统电路设计,包括六大核心模块: 主控电路:涵盖电源、时钟、复位三大基础电路设计要点 通信接口:USB/串口通信和SWD程序烧录电路实现原理 外设驱动:蜂鸣器三极管驱动、LED指示灯和按键检测电路 信号处理:电压测量分压电路与SPI接口OLED显示方案 无线通信:NRF24L01模块的SPI接口电路及滤波设计 电源管理:
到底了