
写文章




- @njsgcs
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
llm vlm启动器 魔搭下模型 vLLM
尽量降低显存占用
我16g内存+16g显存跑个vlm+llm直接闪退啊?
把c盘虚拟空间设置8-16g 改小模型好像就没问题了
groundingdino和vlm和yolo有什么区别
https://huggingface.co/IDEA-Research/grounding-dino-base
RoadCLIP 笔记 针对自动驾驶优化的 CLIP 变体 vlm
RoadCLIP是基于CLIP模型架构、针对道路场景理解(尤其是自动驾驶)进行优化和改进的一种变体。虽然它不是由 OpenAI 官方发布的标准 CLIP 版本,但属于学术界或工业界在 CLIP 基础上为交通与自动驾驶场景定制化训练的一类模型。✅ 简单说:RoadCLIP = CLIP 的“专业版”——专攻道路、车辆、行人、交通标志等驾驶相关语义理解。RoadCLIP 代表了 CLIP 类模型从“通
仓库子文件夹设置不公开 git submodule add
创建一个不公开的仓库然后用git submodule add。
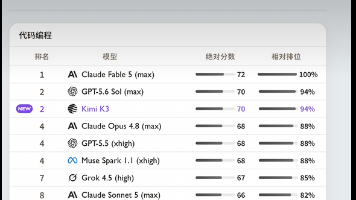
图灵坐标 ai编程模型性价比26年7月17日
按这张表就是免费的glm5.2和k3了
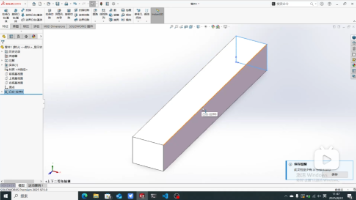
llm操控solidworks 画立方体 deepseek
用eval方法链接llm和solidworks pythonwin32接口。deepseek接入solidowrks画立方体。
打开 solidworks当前文件 所在的文件夹 python pywin32
打开 solidworks当前文件 所在的文件夹 python pywin32。
php让浏览器的开发者模式看不到我fetch的deepseek apikey
【代码】php让浏览器的开发者模式看不到我fetch的deepseek apikey。