
写文章




- @mzy200915
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
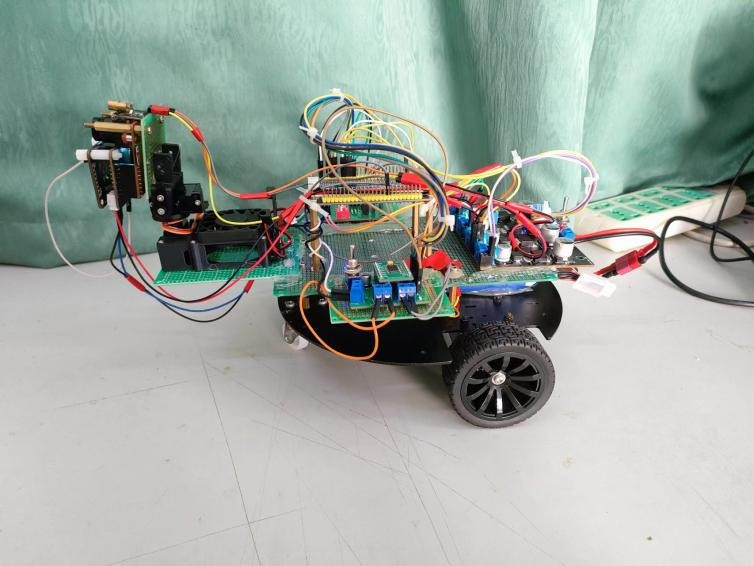
基于STM32+Openmv的追小球(颜色追踪)小车— — 1篇解决所有基本问题
物体追踪模式中,摄像头识别到目标物体时,将目标物体的中心坐标(x,y)、像素宽度length、像素高度high等数据进行打包,通过UART串口发送给STM32MCU,STM32MUC通过对接收到的数据经行解析,利用4个并级PID算法对数据进行运算每两个数据的差或和作为PWM,控制电机运行,到达追踪物体的效果,
基于STM32+Openmv的追小球(颜色追踪)小车— — 1篇解决所有基本问题
物体追踪模式中,摄像头识别到目标物体时,将目标物体的中心坐标(x,y)、像素宽度length、像素高度high等数据进行打包,通过UART串口发送给STM32MCU,STM32MUC通过对接收到的数据经行解析,利用4个并级PID算法对数据进行运算每两个数据的差或和作为PWM,控制电机运行,到达追踪物体的效果,
到底了