
写文章




- @m0_72607891
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
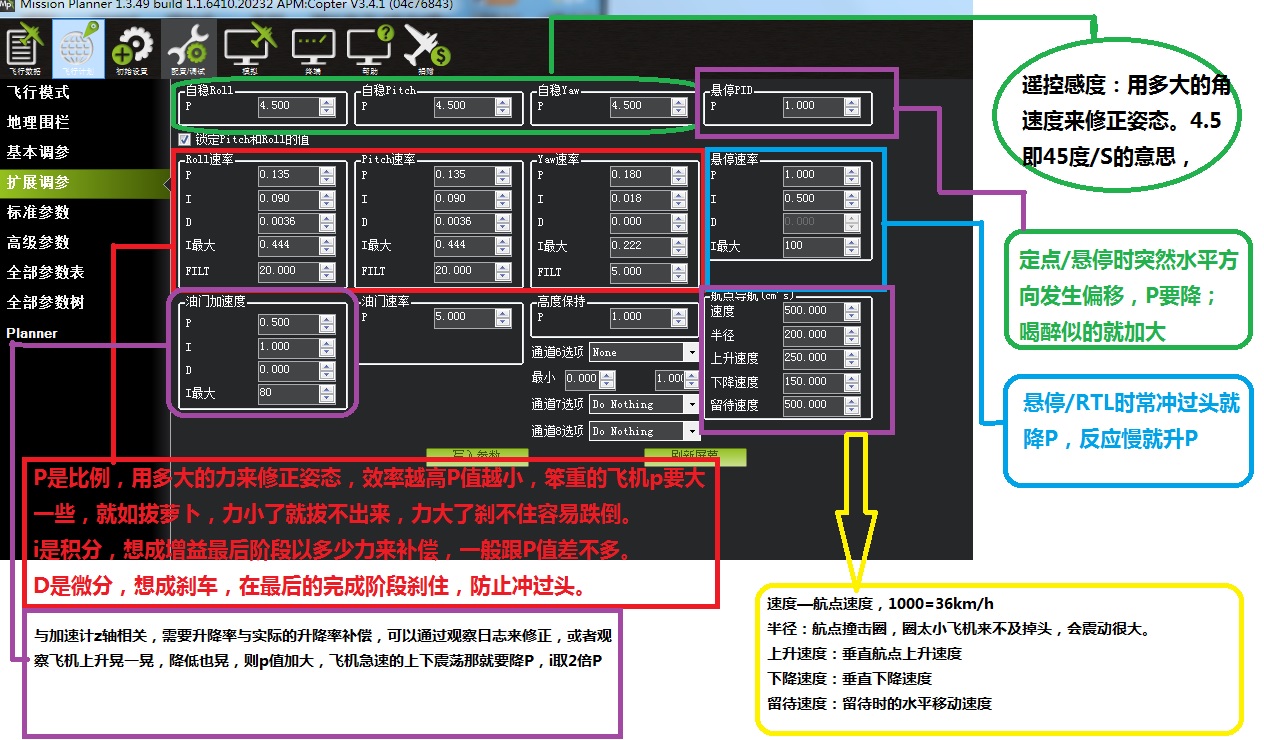
Mission Planner初学者安装调试教程指南(APM或PIX飞控)7——多旋翼无人机APM(PIX)飞控ardupilot missionplanner扩展调参、基本调参(PID调参)
目录1 APM(PIX)飞控ardupilot missionplanner扩展调参、基本调参默认值2Copter Home3调参各部分的解析示意图4在飞行中调roll和pitch(以遥控输入第六通道调参为例)1 APM(PIX)飞控ardupilot missionplanner扩展调参、基本调参默认值自动翻译如图。部分参数含义 雷迅创新 © www.cuav.net与ardupilot具有合作
到底了