
写文章




- @m0_66988867
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
多智能体路径规划综述(万字长文解读)--2022
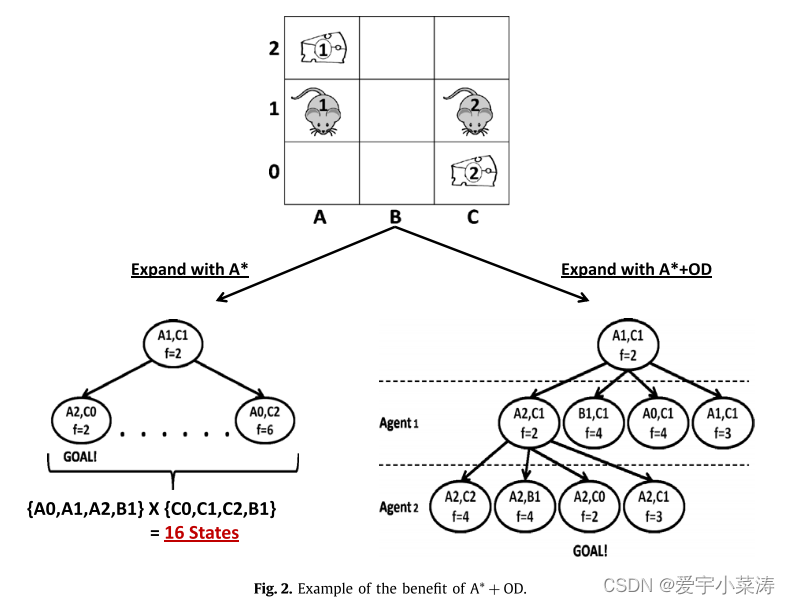
多智能体路径规划(multi-agent path finding,MAPF)是为多个智能体规划路径的问题,关键约束是多个智能体同时沿着规划路径行进而不会发生冲突按照规划方式不同:MAPF算法分为集中式规划算法和分布式规划算法,集中式规划算法是最经典和最常用的MAPF算法,主要分为基于A*搜索、基于冲突搜索、基于代价增长树和基于规约四种算法;分布式执行算法分为专家演讲型,改进通信型和任务分解型三种
01Introduction
关于协作式多智能体强化学习的简介。
多智能体路径规划综述(万字长文解读)--2022
多智能体路径规划(multi-agent path finding,MAPF)是为多个智能体规划路径的问题,关键约束是多个智能体同时沿着规划路径行进而不会发生冲突按照规划方式不同:MAPF算法分为集中式规划算法和分布式规划算法,集中式规划算法是最经典和最常用的MAPF算法,主要分为基于A*搜索、基于冲突搜索、基于代价增长树和基于规约四种算法;分布式执行算法分为专家演讲型,改进通信型和任务分解型三种
多智能体路径规划综述(万字长文解读)--2022
多智能体路径规划(multi-agent path finding,MAPF)是为多个智能体规划路径的问题,关键约束是多个智能体同时沿着规划路径行进而不会发生冲突按照规划方式不同:MAPF算法分为集中式规划算法和分布式规划算法,集中式规划算法是最经典和最常用的MAPF算法,主要分为基于A*搜索、基于冲突搜索、基于代价增长树和基于规约四种算法;分布式执行算法分为专家演讲型,改进通信型和任务分解型三种
到底了