
写文章




- @m0_64266552
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
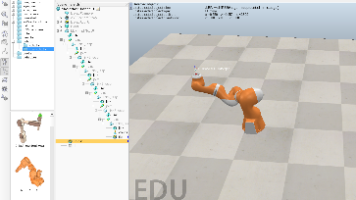
机器人仿真软件CoppliaSim版本问题解决方法并实现机械臂末端自动跟踪目标位置
本文记录了在CoppeliaSim 4.7版本中实现机械臂逆运动学(IK)控制的解决方法。针对新版本功能变更导致旧教程失效的问题,作者通过修改usrset.txt文件恢复旧版界面,但发现部分功能已不可用。最终采用带overlap的蓝线连接方式替代弃用的IK连接方式,成功实现末端执行器跟踪目标点的功能。文章提供了详细的场景搭建步骤和Python控制脚本,实现机械臂在起始点与目标点间的往复运动。同时指
到底了