
写文章




- @m0_51284003
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
基于IWR6843毫米波雷达的点云可视化系统
本项目开发了一个基于IWR6843毫米波雷达的实时数据处理与可视化系统,在原有RadarStream基础上新增了3D点云显示、目标轨迹追踪和跌倒检测三大功能。系统采用模块化设计,包含信号处理、点云聚类、UI界面等核心模块,支持多视图图像显示和实时3D点云可视化。项目代码注释完整,提供完整的雷达配置文件和固件支持,适用于TIIWR6843ISK-ODS雷达的实时信号处理与可视化应用。开源地址:htt

嵌入式系统的核心保障机制:初识看门狗
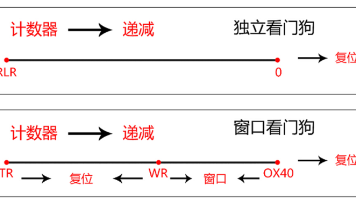
我们先用一句话来概括什么是看门狗:看门狗是一种定时器类型的硬件模块,能在系统软件出现异常(如死循环、跑飞、卡死)时自动重启MCU,以实现故障自恢复。看门狗是硬件层面的最后一道安全防线,当系统无法自我修复时,看门狗能触发复位。我们在学习看门狗的过程中经常听到“喂狗”这一操作,其实“喂狗”就是去定期操作看门狗模块中的计数器,只要你一直喂它(定时“喂狗”),它就安静,一旦你不喂(程序卡死了),它就“咬你
嵌入式系统的核心保障机制:初识看门狗
我们先用一句话来概括什么是看门狗:看门狗是一种定时器类型的硬件模块,能在系统软件出现异常(如死循环、跑飞、卡死)时自动重启MCU,以实现故障自恢复。看门狗是硬件层面的最后一道安全防线,当系统无法自我修复时,看门狗能触发复位。我们在学习看门狗的过程中经常听到“喂狗”这一操作,其实“喂狗”就是去定期操作看门狗模块中的计数器,只要你一直喂它(定时“喂狗”),它就安静,一旦你不喂(程序卡死了),它就“咬你
到底了