- @lz0499
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了《AI时代的财富密码》一书中关于大语言模型工作原理的核心观点。书中指出,AI并非存储标准答案的数据库,而是基于概率的"超级接话高手",其输出质量完全取决于用户输入的提示词质量。作者澄清了三大常见误解:1)AI不具备真正的理解能力;2)无法领会言外之意;3)没有长期记忆和常识判断。书中强调,用户需清晰提供所有必要信息,将AI输出视为可迭代的起点而非终点。此外,文章揭示了
本文分析了双目拼接摄像机在镜头晃动时亮度校正offset剧烈跳变导致画面闪烁的问题。核心原因是运动场景下重叠区域统计样本失效,导致亮度均值剧烈抖动。作者提出分层优化方案:1)采用截尾均值和中位数等稳健统计方法过滤异常像素;2)对offset增加帧间滤波、步长限制和滞回死区约束;3)同步双路AE参数;4)优化ROI配准精度。同时提供了示例代码实现截尾均值统计和offset平滑算法,通过参数调试可有效

为了快速获得较好的拍照效果。拍照模式下会从sensor的binning模式下高帧率快速收敛到合适的目标亮度和白平衡增益,然后把binning模式下稳定的AE和AWB参数再转给linux系统sensor的normal进行热启动。给到linux系统后,linux系统在前5帧左右会有一个如下图较大的增益跳变。实线为Rgain,虚线为Bgain变化趋势图。大概在10帧左右达到白平衡稳定的状态。以下表格是拍
为了快速获得较好的拍照效果。拍照模式下会从sensor的binning模式下高帧率快速收敛到合适的目标亮度和白平衡增益,然后把binning模式下稳定的AE和AWB参数再转给linux系统sensor的normal进行热启动。给到linux系统后,linux系统在前5帧左右会有一个如下图较大的增益跳变。实线为Rgain,虚线为Bgain变化趋势图。大概在10帧左右达到白平衡稳定的状态。以下表格是拍
的前提是,图像区域内没有任何样品结构造成的亮度变化,否则标准差还包含这个结构信息。为此,我们可以连续拍摄两张同样场景的图像,然后把两张图像相减。然而,杯具的现实是,方法很简单,在相机完全无信号的情况下,(如显微镜设为全部光都到目镜,或者盖上镜头盖),将曝光时间设为0, 拍摄一帧图像。我们还可以设置不同的曝光时间,重复上述步骤,用多次测量所得的值作图,通过拟合曲线来观察增益的线性度。的设置,图像亮度

商用级ISP自动白平衡(AWB)通过硬件流水线实现高效色彩校正。系统采用预处理、色彩空间转换、色度椭圆甄别和统计引擎四阶段架构,利用FPGA并行计算能力实时筛选有效白点。核心算法基于色度椭圆模型判定光源类型,结合35位累加器和中断驱动机制确保高精度统计。软硬件协同采用影子寄存器实现增益原子化更新,并通过ROI窗口策略和平滑滤波优化性能。该方案将几何算法与硬件架构深度融合,解决了复杂场景下的偏色问题
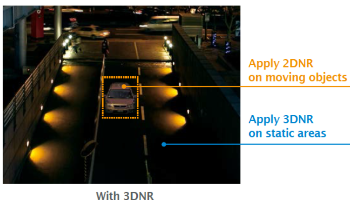
本文探讨了双核操作系统中3DNR模块的两种快速收敛优化策略。第一种方案在前三帧使用固定强降噪参数,第四帧切换至对应ISO参数,虽能提供干净参考帧但可能导致运动判断误差和噪声突变。第二种方案采用阶梯式降噪强度调整,从高ISO参数逐步过渡到目标ISO参数,使参考帧质量平稳过渡,避免过度平滑带来的污染问题。文章强调3DNR优化需在AWB/AE收敛基础上进行,并指出工程应用中需根据实际情况调整策略。
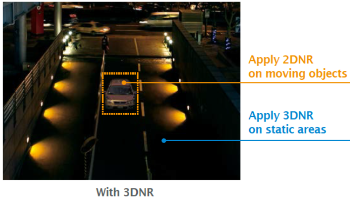
本文针对双核操作系统切换时3DNR模块重新收敛导致白平衡偏差的问题,提出了加速3DNR收敛的优化方案。主要包括:1)临时提升初始时域权重;2)前几帧增强空域滤波;3)放宽初始运动检测阈值;4)预加载初始噪声统计值;5)关闭初始帧自适应调整;6)硬件级参考帧优化。通过组合这些方法,可将收敛时间从8-10帧缩短至2-3帧,第2帧即可达到90%稳态降噪效果,有效解决切换后的图像偏色问题。方案兼顾软件算法
版权声明:本文为博主原创文章,遵循 CC 4.0 by-sa 版权协议,转载请附上原文出处链接和本声明。本文链接:https://blog.csdn.net/Pieces_thinking/article/details/83512820CORDIC算法详解(一)- CORDIC 算法之圆周系统之旋转模式( Rotation Mode )网上有很多类似的介绍,但是本文会结合实例进行...
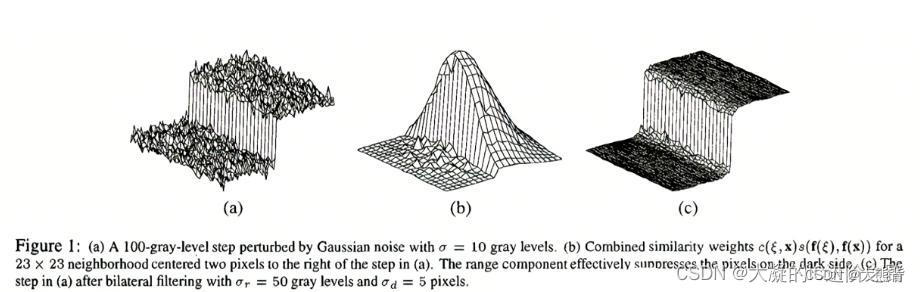
接下来是ISP中的重量级滤波器,大名鼎鼎的双边滤波(Bilateral Filter),这个算法是 Tomasi和Manduchi在1998年提出的。双边滤波除了空域权重以外,增加了一个和图像亮度有关的值域权重,使得双边在去噪声的同时可以保留图像的边界和细节。所以,“双边”的两个边一个是“空域边”,也就是space,一个是“值域边”,即range。