




- @liuzhijun301
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文记录最近实际工作中部署laravel项目到服务器的全部流程。采用docker部署项目,docker镜像是同事上传到阿里云的一个镜像。1 首先安装docker~$ sudo apt-get install docker.io安装完成后查看版本~$ docker -vDocker version 18.06.1-ce, build e68fc7a2 安装docker-...
1 多签名操作的概念回想一下创建账户的命令:Usage: cleos create account [OPTIONS] creator name OwnerKey [ActiveKey]一个账户拥有Owner和Active权限。同时账户也能够自定义新的权限。所谓多签名,就是一个账户可以将它的权限指派给其它多个账户,一个操作只有得到这些授权用户签名而得到执行。多签名是加强账户安全性的一...
1 mysql自动建表(1)首先使用IntelliJ IDEA新建spring boot工程,然后在pom.xml中加入mysql的依赖:<!-- MYSQL --><dependency><groupId>mysql</groupId><artifactId>mysql-connector-java<...
1 mogodb安装及操作首先去官网http://www.mongodb.org/downloads下载安装文件,然后点击安装,注意在安装的时候不要选择compass就可以了。安装后从cmd进入安装目录的bin目录,新建一个data文件夹,然后执行命令来启动mogodb:bin>mongod --dbpath data另起一个cmd,进入到bin目录下,执行命令来连接mongo...
1 PoA共识机制PoW机制的缺陷以太坊现阶段是基于PoW共识机制,PoW工作量证明机制就是区块链网络中一堆计算机通过计算随机数的Hash值,谁先找到这个随机数谁就赢的当前区块的记账权。PoW通过比拼算力,谁的算力大,谁就能够抢到记账权。这样导致网络大量算力用来计算毫无意义的随机数工作中去了,而真正用来打包和验证的算力就受到影响。PoW机制存在51%算力共计问题。只要挖矿者掌握全网51%算力就能控
1 内模原理与重复控制内模原理的表述:在一个控制系统中,如果控制器的反馈来自被调节的信号,且在反馈回路中包含被控信号的动力学模型,那么整个系统是稳定的。内模原理的本质是是把外部信号的动力学模型植入控制器以构成高精度的反馈控制系统,这样的系统能够无静差的跟踪输入信号。对于阶跃信号l(t),其拉斯变换为1/s,所以包含PI控制器可以无静差的跟踪阶跃信号。对于交流信号,其拉斯变换...
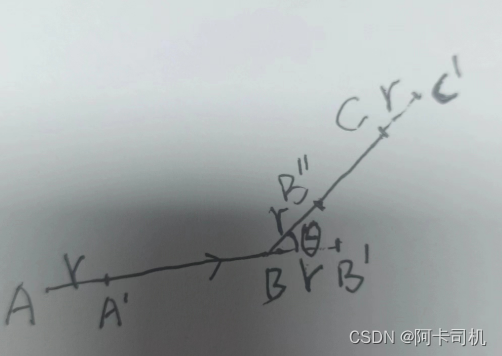
本文主要讲述S形速度规划方案,包括sigmoid函数、sin函数和bezier曲线速度方案。已知初速度Vs,末速度Ve,规划速度曲线分别是sigmoid函数曲线、sin函数曲线、bezier曲线。一 曲线速度规划方案1 sigmoid函数曲线速度规划这种方式在前面博文https://blog.csdn.net/liuzhijun301/article/details/103978087...
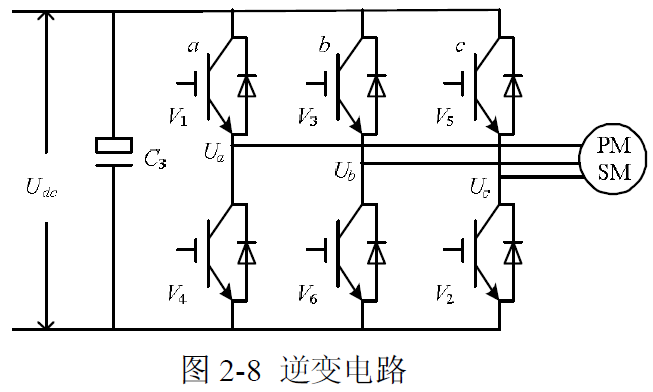
1 SVPWM基本原理1.1 SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在上图的逆变电路中,设直流母线上的电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别施加在空间上互差120度的平面坐标系上,定义这三个电压空间矢量为UA(t)、UB(t)、UC(t),他们方向...
1 什么是迭代学习控制迭代学习控制(iterative learning control,简称ILC)由Uchiyama于1978年首先提出,不过因为论文由日文撰写,影响不是很大。1984年,Arimoto等人用英文介绍了该方法。它是指不断重复一个同样轨迹的控制尝试,并以此修正控制律,以得到非常好的控制效果的控制方法。迭代学习控制的特点是“在重复中学习”,通...