
写文章




- @jiangrenkuo
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
模糊自适应PID
最简单的模糊自适应控制,就是先设置一个初始的PID参数,然后根据误差变化PID的参数。比如,我们现在有一个PI控制器的参数为【5,0,0】,那么我们可以设置Kp=Kp+e*Ke(给误差乘一个系数Ke);然后是Ki,在误差较大时,我们给Ki一个值,如0.5,当误差小于某个设定值时,就将Ki和Iout设置为0。
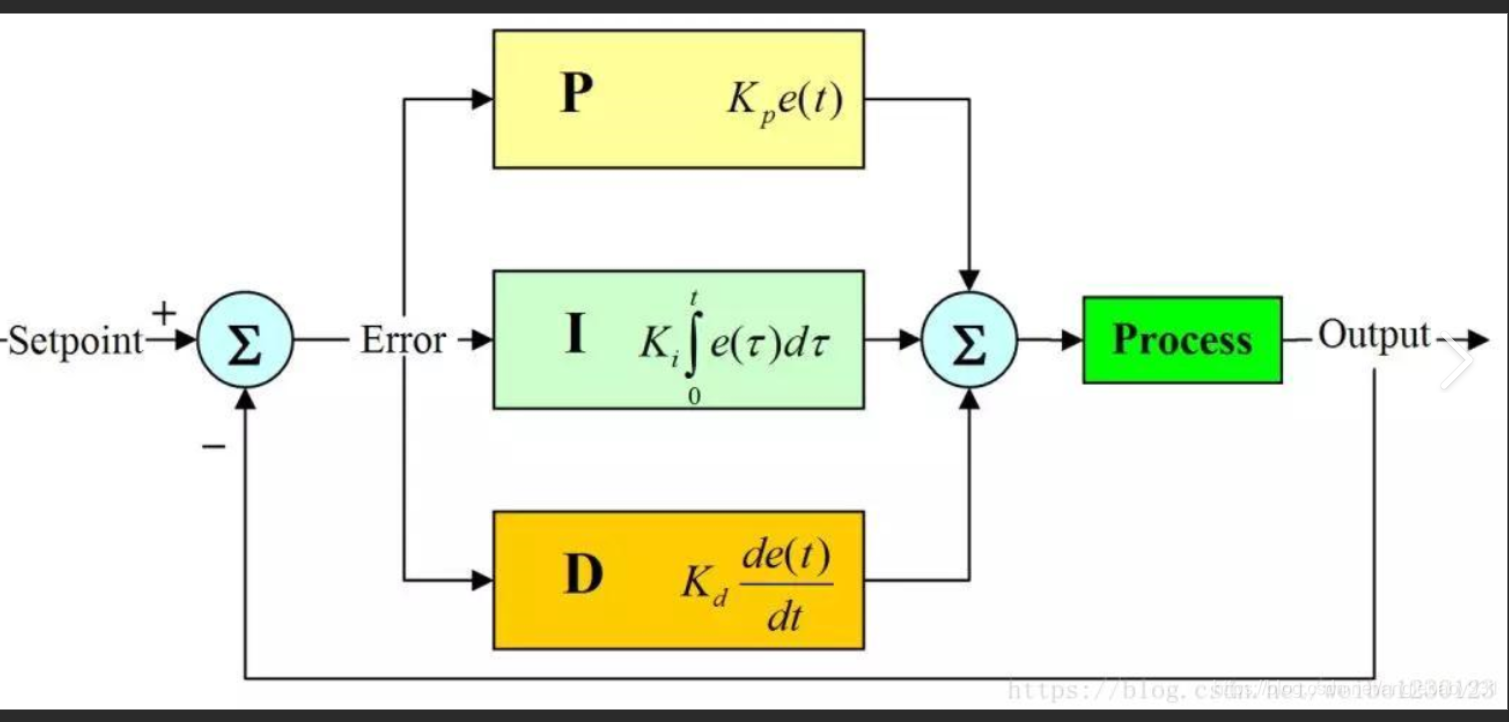
PID控制器简述(附代码)
直观的来看,当误差突然增大时,此时的e0-e1会很大,D项的输出也相应增大,从而使系统快速响应(理论上讲是这样,不过产生误差往往是在很短的时间内,这就导致大部分时间e0-e1都是负的,从而减小系统输出)。I是积分系数,同样,我们假设误差为e,积分可以理解为简单的累加。但是只用P会存在稳态误差(随着e的减小,输出也越来越小,例如无人机在上升时,到达目标位置之后,还需要抵抗重力,因此也需要电机持续输出
到底了