




- @iamjackjin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
具身只能VLA板块,基于RoboTwin仿真平台的数据采集->VLA模型训练->仿真验证 pipeline
具身只能VLA板块,基于RoboTwin仿真平台的数据采集->VLA模型训练->仿真验证 pipeline
具身只能VLA板块,基于RoboTwin仿真平台的数据采集->VLA模型训练->仿真验证 pipeline
VLA有关项目的入门分享
具身只能VLA板块,基于RoboTwin仿真平台的数据采集->VLA模型训练->仿真验证 pipeline
具身只能VLA板块,基于RoboTwin仿真平台的数据采集->VLA模型训练->仿真验证 pipeline
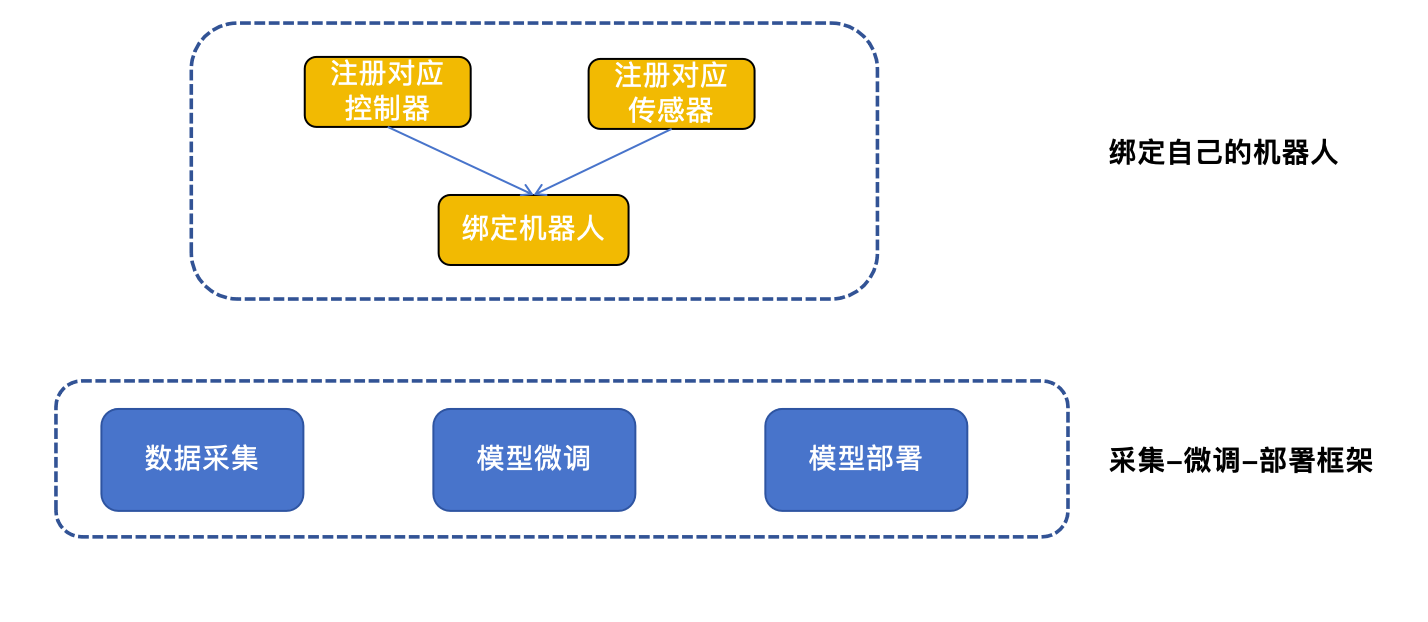
在开始使用项目前请先看完整个介绍, 一定会对你很有帮助的哦~我的项目链接:关节角, 机械臂控制的最优选择末端位姿, 目前机械臂主流有两种EEF表示, 我推荐使用欧拉角的6D pose, 而不是四元数, 但是取决于机械臂厂家这个基本默认是关节角的移动速度, 和厂家有关, 基本在VLA模型中是没有用的, 如果需要可以按照你的需求进行设置, 末端也好, 关节角速度也行对应电机的控制力度, 如果有夹爪的控
VLA有关项目的入门分享
VLA有关项目的入门分享
可能很多人会问为什么我要发布这样的一片文章呢?网络上的教程难道不够吗?确实,不够。与其说是不够,倒不如说是对新手不太友好,大部分的教程都是已经成功掌握了这个编辑器的大佬在讨论交流,而非面向萌新的引导式教学。我也正因为寻找入门方式(中文的,笔者英语不好),而耽搁了一个晚上,弄的头昏脑涨,不知所以然。我是在机缘巧合之下接触LaTex的,在此之前,我用Mathtype用的不亦乐乎,但是在我参加IMMC.