- @hursing
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
0.前言看到过几篇程序员的职业生涯过程,我也来当一回写手吧,希望对和我一样曾经磕磕碰碰过的人有帮助。纪念大学毕业五周年。1.从校园启程我的大学专业全称是无机非金属材料工程,这专业多与玻璃、水泥、陶瓷打交道,高大上一点的是各种珠宝,前沿一点的是纳米材料。想先声明的是,我不是在黑自己的专业,只是每个人都会有自己喜欢和适合自己的工作和生活状态。我尝试过为了完成一个程序而废寝忘食后就爱上了这个职业,即使知
2022.5.7,基于v4.0.5的分析。官网文档没及时更新,本文对当前版本源码的描述可能和官网不一样。
0.前言现今“前端”这个词涵盖的技术已经远不只HTML/CSS/JS了。我们先来看看数据的最长链路:起点是浏览器地址栏输入框浏览器缓存浏览器网络请求各级路由器和CDNNginx或F5网关缓存Node.jsNode层缓存静态文件读取/数据库读取/服务器渲染返回响应通过各级路由器浏览器发起预连接、预加载、子资源请求等浏览器渲染JS执行引起更多网络...
1 前言因为《猫科动物和企鹅在窗口外看机器人吃苹果》这出戏太美,很多公司都希望能全平台同时发布新版本app,还要能复用代码以降低开发成本。这迫使一部分已熟悉某个平台的先锋们转岗到另一个平台边学习边开发。最终有少部分人在每个战场都打拼过,从而能全盘考虑以设计出良好的可复用架构。革命总会出新知,今天已有一些开源框架能应对同时在5大平台Mac OS X、Linux、Windows、Android、iO
一个典型的工业机器视觉系统包括:光源、镜头(定焦镜头、变倍镜头、远心镜头、显微镜头)、 相机(包括CCD相机和COMS相机)、图像处理单元(或图像捕获卡)、从上表可看到,同一个数据(例如自身离地高度)可以有多种来源,而且同类传感器还有多重冗余备份,加上实时精度估算的考虑,最终结果的融合计算过程是比较复杂的。自动驾驶本身也是一种融合计算,综合了多个功能部件的数据来实现,它的核心作用是。另外,总结传感
2022.5.7,基于v4.0.5的分析。官网文档没及时更新,本文对当前版本源码的描述可能和官网不一样。
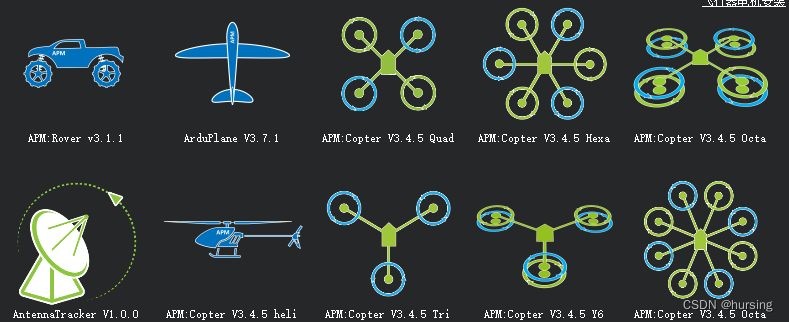
Pixhawk是硬件,PX4是它的原生固件。这个团队维护的地面站项目是QGroundControl。APM是硬件,ArduPilot是它的固件,但最新的ArduPilot已经只能运行在Pixhawk上了。有时候为了方便,也有人称呼ArduPilot为APM。这个团队维护的地面站项目是MissionPlanner。日常沟通的【飞控】一词有多个含义:最专业的意思:无人机上的MCU作为板载计算机,连同所
MAVLink协议是一种(应用层)数据协议,不依赖传输协议。传输层可以是TCP、UDP、RS232串口,甚至基于WebSocket。在定义数据的基础上,补充描述了几种子协议(microservice,直译是微服务)的现有实现。协议不保证送达,客户端需要经常检查机器状态确认命令被执行。具体的数据定义包括:数据帧格式,包括协议头和载荷(Payload),协议头包括协议版本、载荷长度、兼容标识、次序号、
1 基础设施程序最基本的处理就是数据IO以及为了并行计算所做的操作,它们通常会作为程序的底层框架,供上层使用。2 交互从PC到现在的移动设备还有VR,人机交互中的输入设备在不断自然化,可是展示界面的元素仍然还是这几种:静态文本、按钮、列表、输入框、选择菜单、进度提示、滚动条、标签页。每种UI框架都提供这些基本组件,可以说掌握它们就等于对这个框架入门了。高级的交互会跨越窗口、跨越程序,并能更智能化地
从电子运动开始,讲解飞机和汽车的制造原理。