
写文章




- @harry_i_potter
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
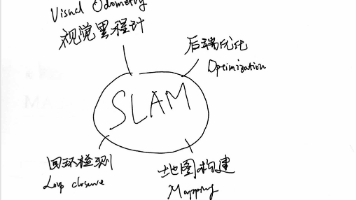
智能无人系统(视觉SLAM基本知识-初始SLAM)
《视觉SLAM十四讲从理论到实践》第二章初始SLAM
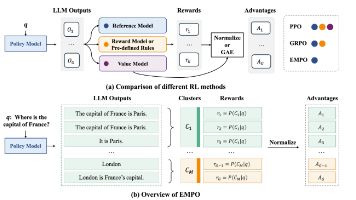
EMPO:通过最小化语义熵无监督地提升LLM推理-论文阅读
EMPO:通过最小化语义熵无监督地提升LLM推理-论文阅读
到底了
该用户还未填写简介
暂无可提供的服务
《视觉SLAM十四讲从理论到实践》第二章初始SLAM
EMPO:通过最小化语义熵无监督地提升LLM推理-论文阅读