




- @hangl_ciom
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
之前写过一个Windows下编译YOLOv3的文章:[《Win10+VS2015安装配置YOLO3(CPU/GPU)》](https://blog.csdn.net/hangl_ciom/article/details/88914288?spm=1001.2014.3001.5501)现在Yolo已经到V4了,而且性能有了比较大的提升,所以也装了个Yolo4测试一下,以下为编译时的记录。
1 前言之前写了几篇关于UR机器人网络控制的文章:《UR机器人返回信息格式解析》、《UR机器人通信端口和协议》,有不少读者问关于编程实现方面的问题,因此,这里上传有关的代码,供同行参考。2 包含内容我这里是用VS2015编译环境,用C/C++语言实现的。实际上没有高深的技术,涉及到两个内容:Windows Sockets网络编程;数据内容解析,包括数据字节的转换。3 程序实现3...
DirectX(Direct eXtension,简称DX)是由微软公司创建的多媒体编程接口,是一种应用程序接口(API)。DirectX可以让以windows为平台的游戏或多媒体程序获得更高的执行效率,加强3D图形和声音效果,并提供设计人员一个共同的硬件驱动标准,让游戏开发者不必为每一品牌的硬件来写不同的驱动程序,也降低用户安装及设置硬件的复杂度。——
坐标系中,一个刚体的状态可用位置和姿态来描述,位置即为该刚体在坐标系中的空间位置,用一个坐标向量即可表达。而要描述刚体的姿态,有很多种表示方法,以下列出常用的:1 旋转矩阵1 欧拉角(Euler angles)1.1 欧拉角欧拉角是描述刚体姿态的一组3个角值的参量,同时需要指定三个角度转动时分别围绕的坐标轴,以及旋转的顺序,一旦确定了这些,那么这个欧拉角的描述就可以分解为三个基本的旋转,三...
PnP问题概念,OpenCV中的solvePnP的各参数意义,并包括使用方法。
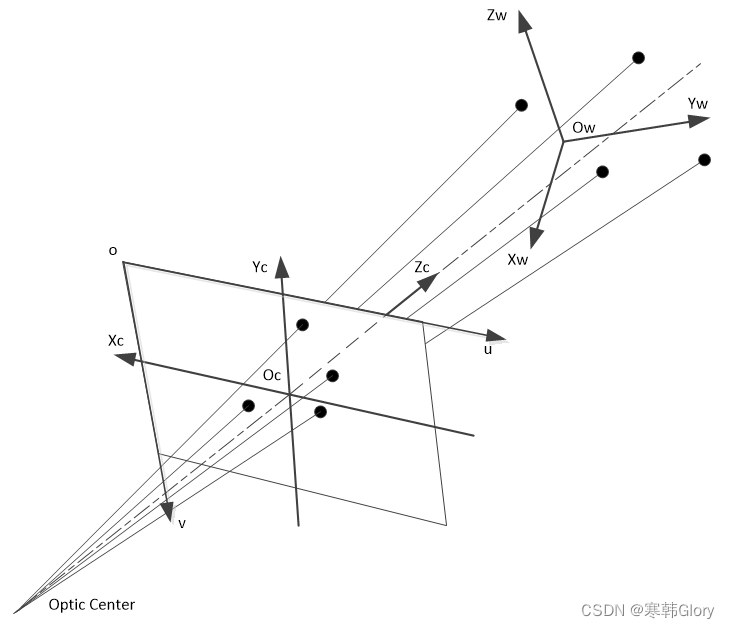
关于欧拉角的概念,欧拉角的定义(动态,静态,内旋、外旋),以及内旋和外旋的公式推导。
DirectX(Direct eXtension,简称DX)是由微软公司创建的多媒体编程接口,是一种应用程序接口(API)。DirectX可以让以windows为平台的游戏或多媒体程序获得更高的执行效率,加强3D图形和声音效果,并提供设计人员一个共同的硬件驱动标准,让游戏开发者不必为每一品牌的硬件来写不同的驱动程序,也降低用户安装及设置硬件的复杂度。——
第一次操作UR10协作机器人的记录1 引言UR机器人参考:丹麦优傲机器人 中文网页项目需要借来了一台UR10协作机器臂,用自带的触摸屏控制试验了一下,非常好用,又从网上下载了一段基于C#的程序,大概读了一下,并用VS2015用C实现了对机械臂的控制,同时学习了控制机械臂的几个注意的点,以下纪录。注:这里只是工作记录,没深究内部原理和协议规定。2 连接和端口计算机与UR机器人的连接通过...
1 概述UR机器人提供了多种端口,用于控制和读取机器人信息,本人整理了相关信息,见文章《UR机器人通信端口和协议》。本人使用了30003端口来向机器人发送URScript脚本控制命令,并通过该端口接收实时返回数据。2 UR返回协议解析2.1 返回数据包频率和长度由于30003端口返回的信息是最全的,包含了30001、30002端口的返回信息,因此,这里以30003端口信息解析。3000...
1 概述UR机器人作为目前使用广泛的协作机器人,其开放了基于TCP/IP的远程控制功能,提供了多个多类型的端口,用于工业总线控制,或者用户自行编程控制,以下记录整理此方面的信息。2 UR机器人通信2.1 UR通信协议UR机器人可通过TCP/IP通信,向机器人发送控制命令,以及从机器人获取状态信息。2.2 UR通信端口UR机器人通信时提供了以下接口,我们可以根据自己需要,使用其中的一种或...