
写文章




- @cuglizhen
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
cartographer建的大地图障碍物堵塞路径规划 仿真
cartographer建的大地图障碍物堵塞路径规划
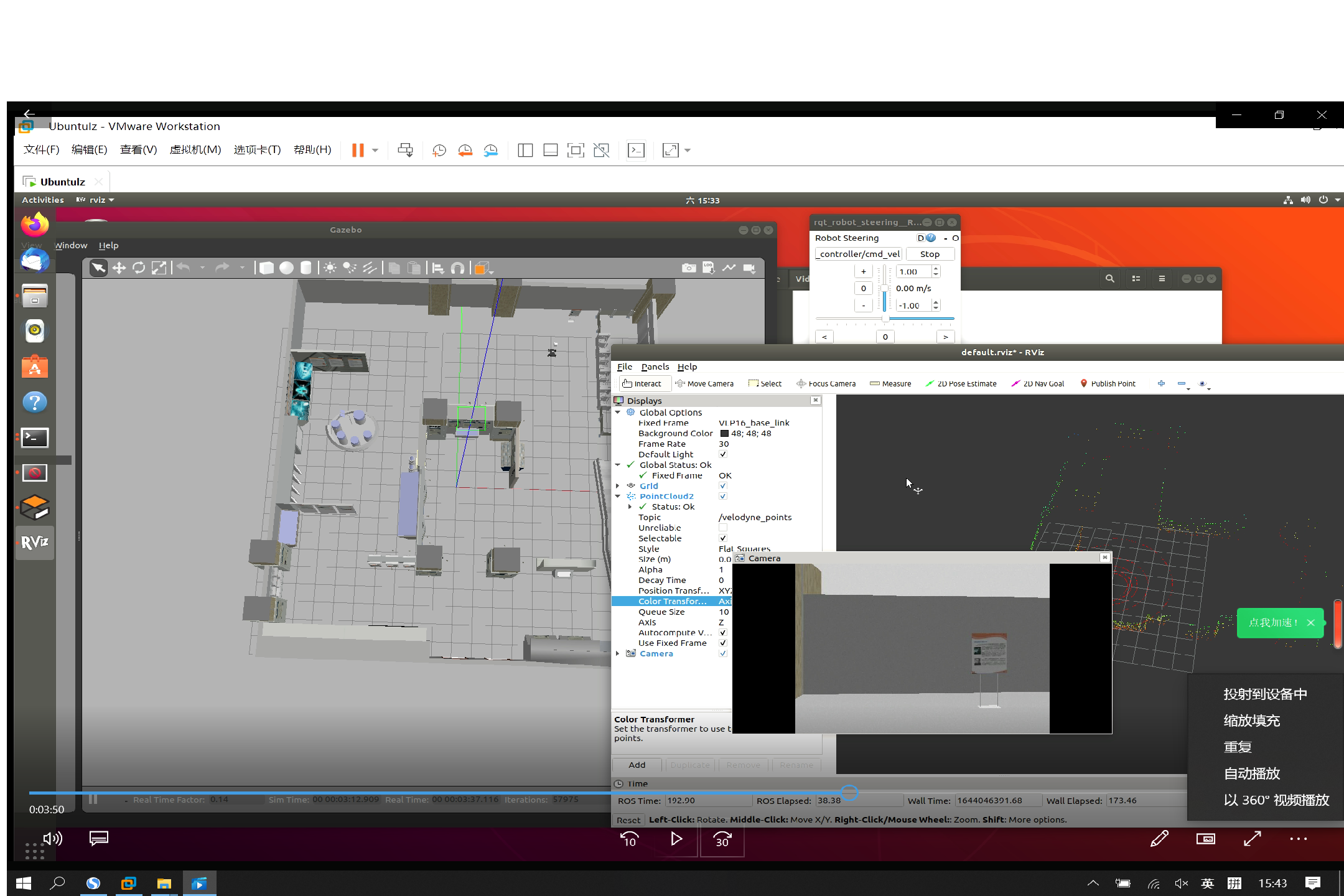
ROS使用Neor_mini和VLP-16 Gazebo仿真
1、安装gtsam依赖(自己找,这个包里存在LOAM,需要这个库)2、安装neor mini包git clone https://github.com/COONEO/neor_mini.gitcd neor_mini/mini_sim18_wsrosdep install --from-paths src --ignore-src -r -ycatkin_make此处如果出错,原因在于ca...
到底了