




- @chuoji2469384644
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
行业部分:目前机器视觉在国内更多是的工业自动化的应用,另一个用的还比较多一些的是医疗设备。机器视觉目前比较成熟的应用还主要集中在定位、尺寸测量、OCR/OCV、特征有无等领域,至于外观缺陷检测是一个有很大检测需求,但是还很难做到批量或者准备的检测应用(主要还是缺陷的特征的差异性如划痕、以及产品的多样性复杂性造成的)。视觉的市场需求目前尚未饱和,还有很大的空间。一方面是人力成本的提高,改善劳动强度的
一、引言在机器视觉的领域里,总会遇见一些获取适合成像比较难的项目,如:图像对比度不够、有反光干扰、有背景干扰等。这些项目通常需要消耗工程师大量的时间去反复评估项目或者调试设备。现在,有很多最新多路时序触发光源,配合相应的图像处理算法可以完美地解决以上问题。二、多路时序触发光源工作原理多路时序触发光源控制器最多支持多达8路光源的开关及亮度控制。当接收到外部触发信号后,光源可以根据用户的设定依次点亮多
很多初学者,都对标定概念模糊不清,分不清坐标系之间的关系,搞不清相机标定和机械手相机标定有什么关系,想当初自己也是一个人摸索了很久,本文将尽量给大家解释(更多技术分享,请关注微信公众号:善眸科技;更多技术交流请加入qq机器视觉联盟群:1020941040)。我们通常所说的相机标定分为两种,一种是相机参数的标定,这一般用到张氏标定法,标定的作用是校正相机自身的畸变,利用校正得到的参数对图形进行处理后
这一篇的内容主要要讲一点在深度学习的3D目标检测网络中,我们都采用了哪些数据预处理的方法,主要讲两个方面的知识,第一个是representation,第二个数据预处理内容是数据增广。作为本篇博文的引言,我们先给一种博主制作的比较重要的3D检测方法图鉴,如下,就笔者的个人理解,今年的CVPR出现了很多的one-stage的方法,同时出现了很多融合的方法,这里的融合有信息融合,有representat
前言总结了几种基于激光雷达点云数据的3D目标检测算法,还有一些算法不再单独列出,这里做个简单总结来分享下!基于激光雷达点云的3D目标检测算法1、End-to-End Multi-View Fusion for 3D Object Detection in Lidar Point Clouds(Waymo和Google联合提出)主要提出了一种新的端到端多视图融合(MVF)算法,该算法能有效地学习利用
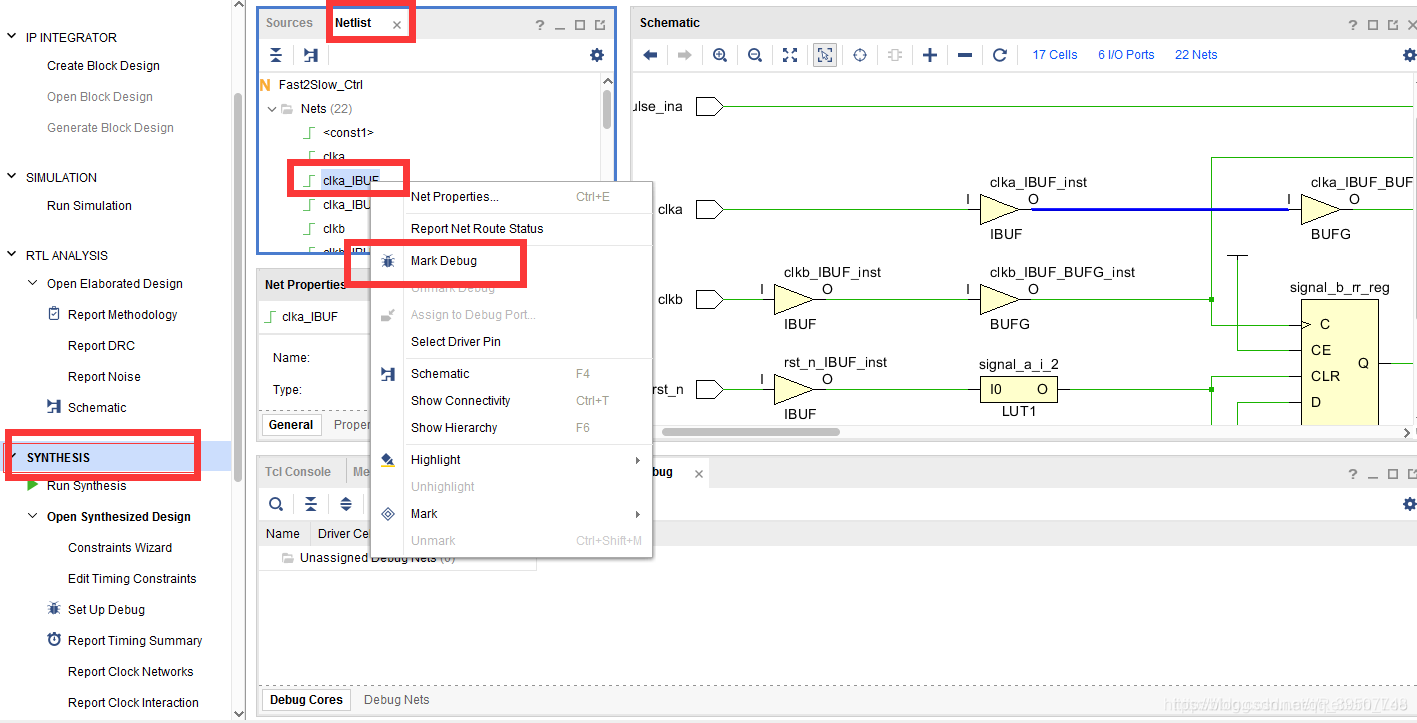
Vivado中提供了多种Debug的操作方式,下面就来总结一下:方式一:代码中例化ILA IP核需要探测多少个信号,信号的位宽是多少,直接选择即可:下面界面可以选择探测信号宽度以及触发方式:方式二:通过网表标记综合后生成网表,在网表中设置Debug:Mark Debug或者在综合后的原理图中Mark Debug,这和网表debug是一致的:在标记Debug后,就等于选择了需要debug的信号,之后
1 halcon相机标定和图像矫正对于相机采集的图片,会由于相机本身和透镜的影响产生形变,通常需要对相机进行标定,获取相机的内参或内外参,然后矫正其畸变。相机畸变主要分为径向畸变和切向畸变,其中径向畸变是由透镜造成的,切向畸变是由成像仪与相机透镜的不平行造成的。(更多技术分享,请关注微信公众号:善眸科技;更多技术交流请加入qq机器视觉联盟群:1020941040)。针孔模型是理想透镜的成像模型,但