
写文章




- @c_ccrush
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
UniLION论文学习
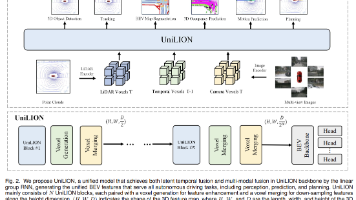
本文提出UniLION自动驾驶统一模型,采用线性组RNN处理多模态长序列数据。该模型通过直接序列连接实现多种输入模式(LiDAR点云、多视图图像、时间序列)的统一处理,无需显式融合模块。UniLION生成共享BEV特征,支持并行执行3D检测、跟踪、预测和规划等任务。实验表明,该模型在多种配置下均具竞争力,为自动驾驶基础模型提供了新思路。
到底了