
写文章




- @Shoulderc
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
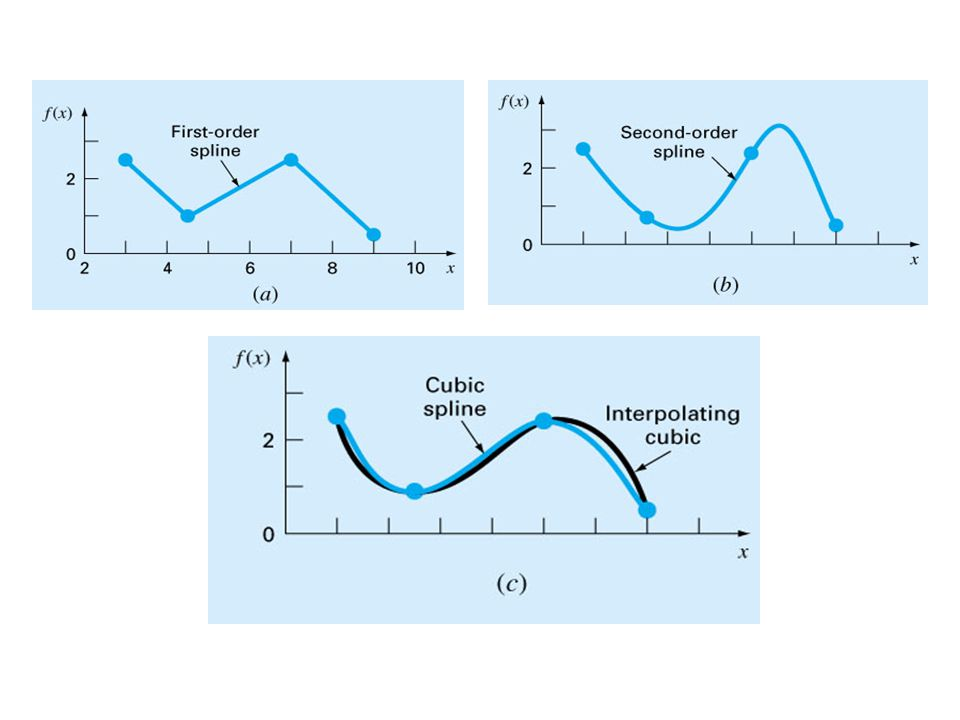
三次样条插值(cubic spline Interpolation)笔记
本文为在学习三次样条插值时的一些记录,包含原理介绍、公式推导。最后参考github上开源项目的python代码,完成c++实现。三次样条插值是一种常用的数学方法,用于在一组已知点的边界内构造新的点。这些新的点是插值函数(称为样条)的函数值,它本身由多个三次分段多项式组成。具体公式如下,fxa1b1xc1x2d1x3x∈x0x1a2b2xc2x2d2x3x∈x1x2⋮anbnxcnx2dnx3x∈。
自动驾驶-控制算法(三)
本文主要记录模型预测控制(MPC)的原理,以及基于MPC实现自动驾驶车辆路径跟踪。

自动驾驶-控制算法(二)
本文主要记录线性二次型调节器(Linear quadratic regulator,LQR)原理和推导过程,并使用基于运动学模型的LQR实现车辆路径跟踪。提示:以下是本篇文章正文内容,下面案例可供参考。
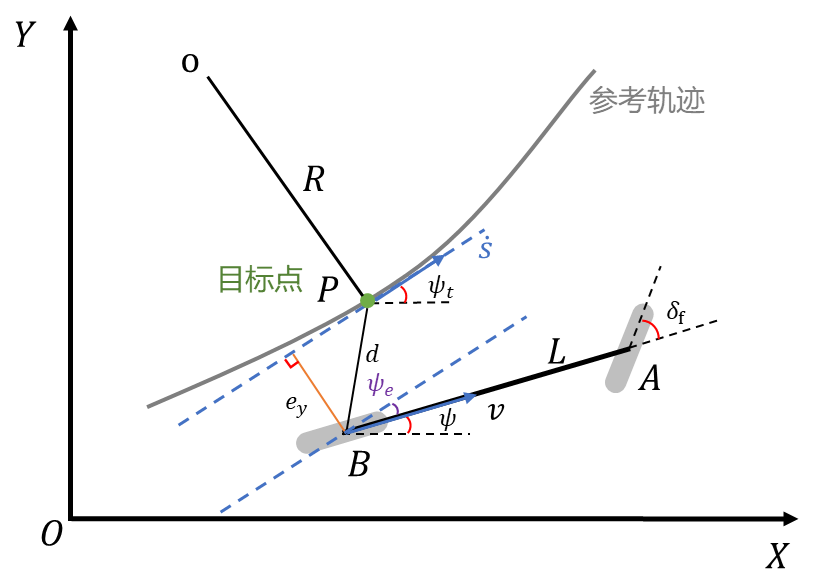
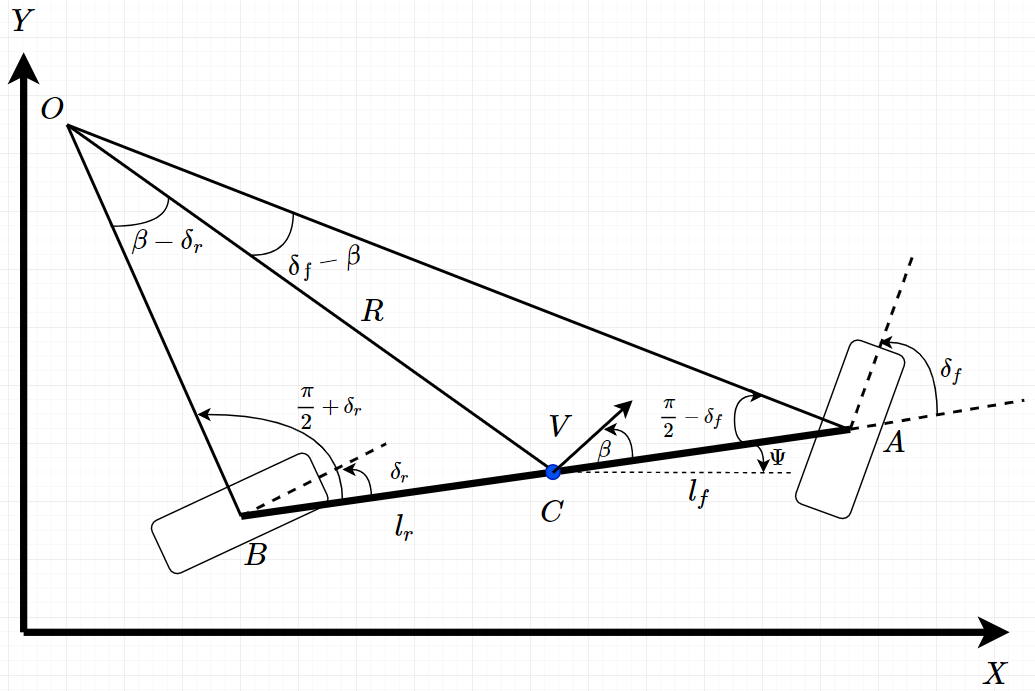
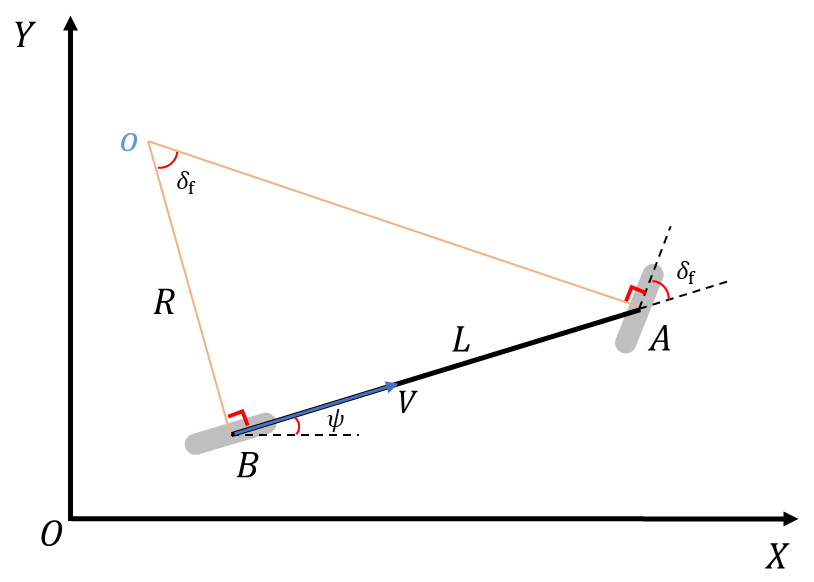
自动驾驶-控制算法(一)
文章目录前言一、纯跟踪算法1. 车辆运动学模型2. 纯跟踪算法推导二、Stanley算法1.车辆运动学模型2.Stanley算法推导三、后轮位置反馈控制算法1.车辆运动学模型2.后轮位置反馈控制算法推导参考文献前言本篇文章主要记录自动驾驶控制算法学习中的一些基础的非模型优化的算法,包括纯跟踪算法(PurePursuit)、Stanley算法、后轮反馈控制算法。一、纯跟踪算法1. 车辆运动学模型纯跟
到底了