




- @Q18080951
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
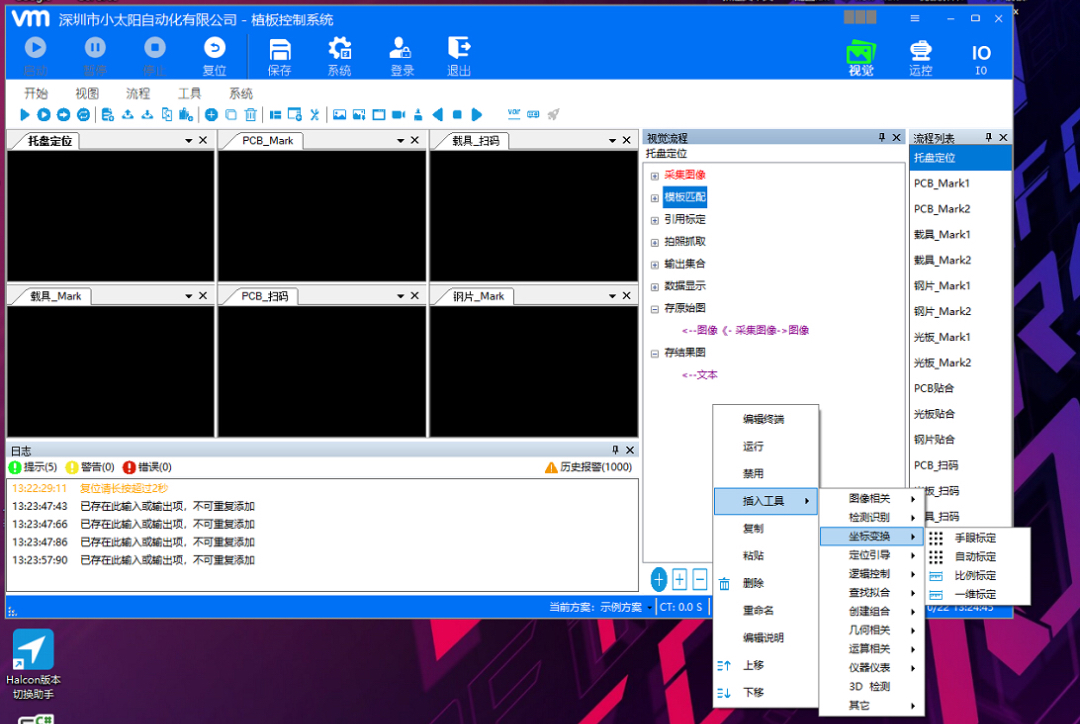
今天聊的这个框架直接把Halcon封装成拖拉拽的积木块,连halcon语法都不用背就能搞定位引导、OCR识别这些硬核功能,还能和PLC对线。说实话,这个框架最狠的不是技术实现,而是那些藏在工具箱里的实用小工具。拖拽式编程,无halcon基础也能上手,匹配,测量,条码识别,ocr,定位引导,对位等,支持plc通讯,集成主流相机sdk,系统集成.其实背后偷偷做了金字塔分层搜索,运行时占用的内存比原生的
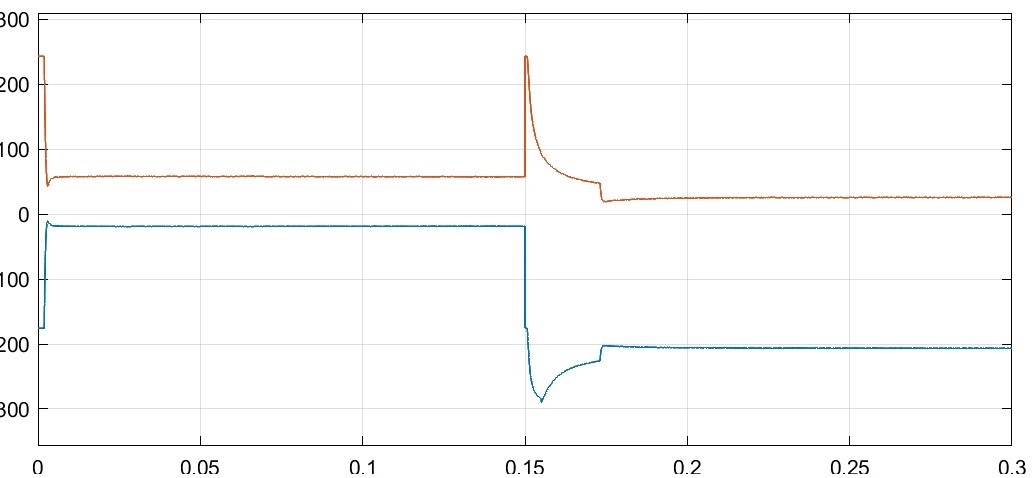
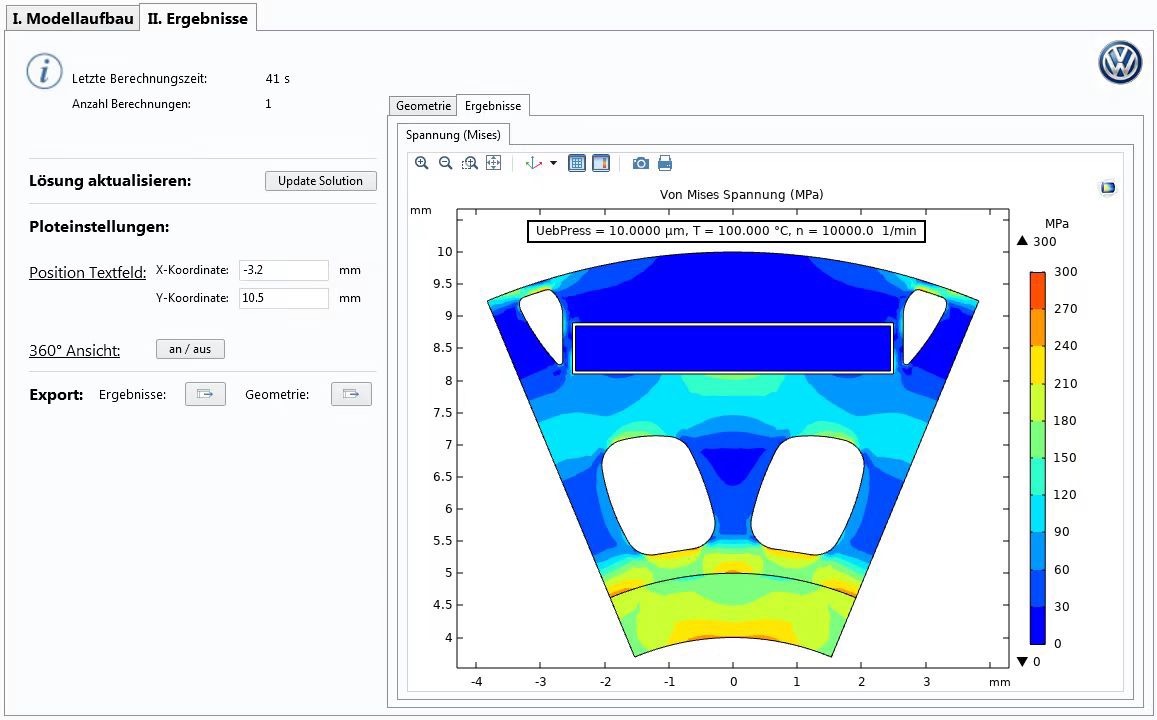
内置式PMSM的弱磁控制策略通过在不同转速区域采用不同的控制方法,实现了宽调速范围和高效运行。额定转速以下的MTPA控制、额定转速以上的电流圆运动控制,以及转折速度时的MTPV控制,三者相互配合,使得电机在不同工况下都能保持良好的性能。代码实现中,通过状态机的方式可以方便地实现不同控制策略的切换,同时也能保证系统的稳定性和响应速度。希望这篇文章能够帮助你更好地理解内置式PMSM的弱磁控制策略!
不同数据库需要对应的驱动,比如MySQL要装ODBC驱动,SQL Server建议用Native Client。今天咱们来点LabVIEW操作数据库的硬核玩法,重点拆解Access/MySQL/SQLServer三个数据库的增删改查实战。所有源码没做任何加密,DB操作VI都放在<函数选板→数据通信→数据库>里。遇到坑的可以重点看连接字符串配置和驱动版本,这俩坑我帮你们踩了三年...重点说下事务控制

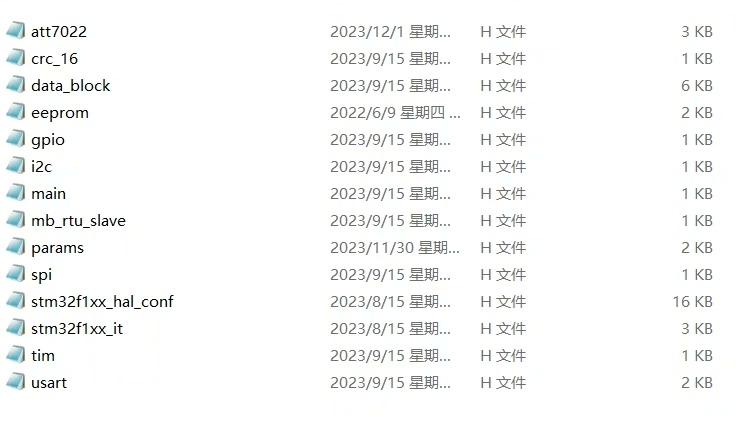
基于STM32+ATT7022芯片三相交流电测量RTU可测量电压、电流、功率、功率因素、频率、电量等参数,MCU主控为STM32F103C8T6,支持485通信,Modbus 协议,成熟稳定项目。注意:只提原理图文件、程序代码最近搞了个基于STM32 + ATT7022芯片的三相交流电测量RTU项目,感觉还挺有意思,和大家分享下。这个项目可以测量电压、电流、功率、功率因素、频率、电量等一堆参数,主
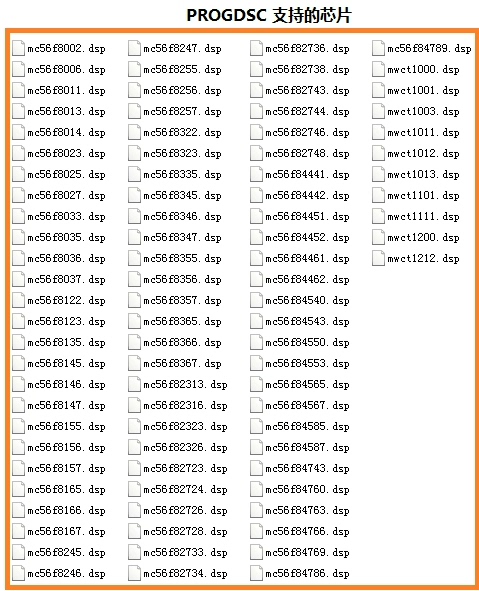
有次遇到冷门错误码402,最后发现是仿真器固件没升级——这软件居然不会自动检测固件版本,版本兼容性这块做得真糙。PROGDSC作为官方指定的烧录工具,虽然界面长得像Windows XP时代的产物,实际操作起来倒是比想象中顺手。遇到连不上的情况,优先查电源波纹是不是超标,这系列芯片对供电质量敏感得像个公主。飞思卡尔仿真器/编程器/烧录器软件PROGDSC,读写MC56F系列芯片,支持的芯片列表见第三
先看个真实的场景:某实验室拿到个Xilinx UltraScale+的加密IP核,Vivado 2021直接弹窗显示"encrypted module requires license"。xilinx(包括最新的vivado2021),altera,intel, synopsys, cadence, mentor, gowin,pango,actel,lattice,aldec,efinix等。遇
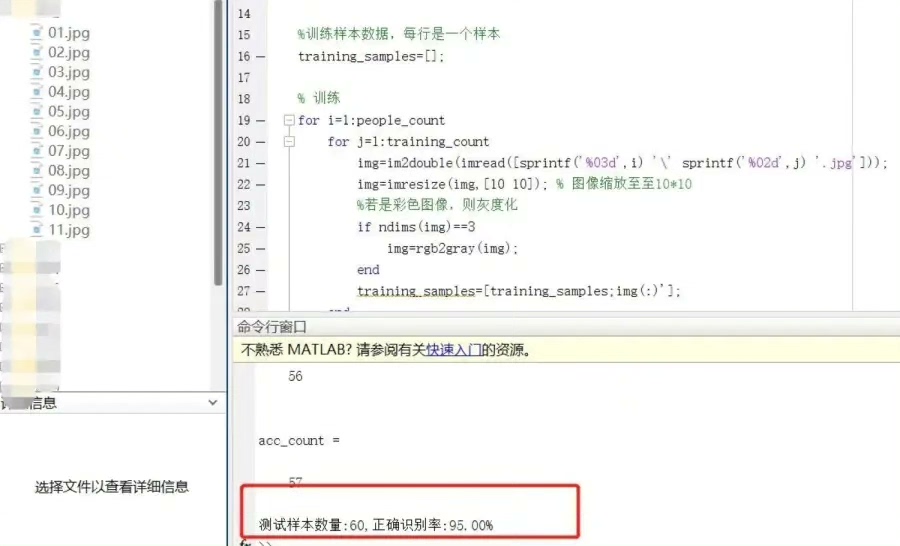
基于MATLAB平台的PCA人脸识别还是比较直观和易于实现的,通过调整主成分数量、分类器等参数,还能进一步优化识别准确率。希望感兴趣的朋友可以尝试,说不定能在这个基础上做出更有意思的成果呢。
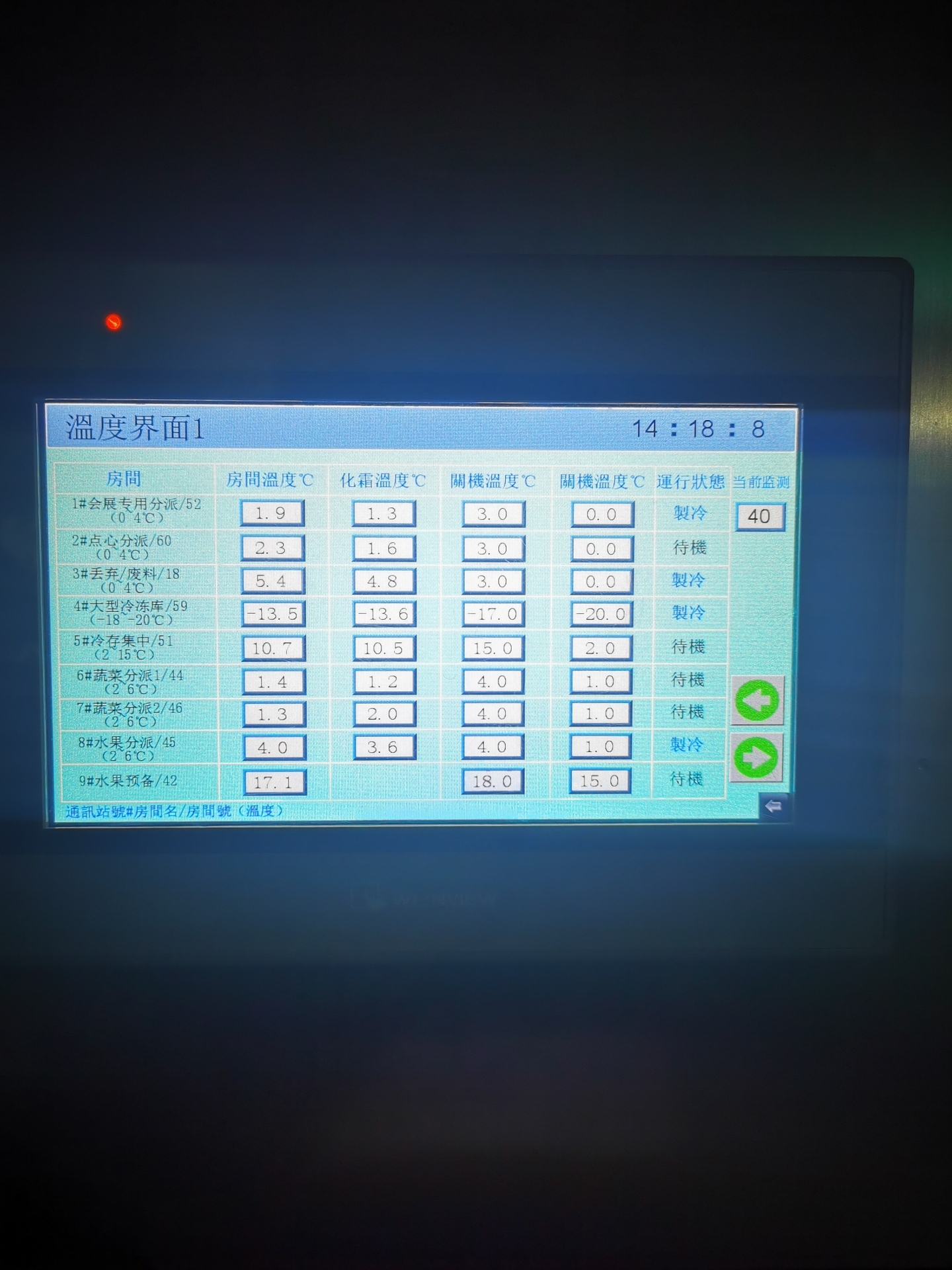
西门子200smart,MODBUS RTU轮训实例,读取/写入16台温控器数据,通过间接寻址,分配各温控器数据,程序已经过项目验证,注释详细,现出售PLC程序,附送温控器通讯协议文件。在自动化控制项目中,常常会遇到需要与多个设备进行通信并采集、控制数据的场景。今天就来给大家分享一个西门子200smart通过MODBUS RTU协议轮询读取/写入16台温控器数据的实例,而且这个程序已经过项目验证,
记得在材料属性里把两相黏度比调成3:1,表面张力系数设0.072N/m,这参数能让界面变形更明显。提供基于comsol中相场方法模拟多孔介质两相驱替(水气、油水等等)的算例(也可以定做水平集驱替的算例),可在此基础上学会利用comsol软件进行两相流驱替的模拟,拓展研究,具体参考算例附后。先来点有意思的——想象把咖啡渍从桌布里挤出来的过程,这就是典型的水气驱替场景。把时间步长改自适应BDF方法,稳
WinCaps3的帮助文档是藏在安装目录下的CHM文件,但Win10/11默认会阻止这类文件打开。调试机械臂本身已经够头秃了,别再让软件安装消耗你的发量。官方给的安装包经常是多个版本的混合体,有次我手滑装了2021版驱动结果把2019的runtime搞崩了。最近在调试DENSO机械臂的时候,发现不少同行在WinCaps3的安装和授权环节翻车。今天就结合自己的踩坑经验,聊聊怎么搞定这个工业机器人界的
