
写文章




- @LLZ15827447646
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
光流模块在无人机中的应用—光流模块倾角补偿
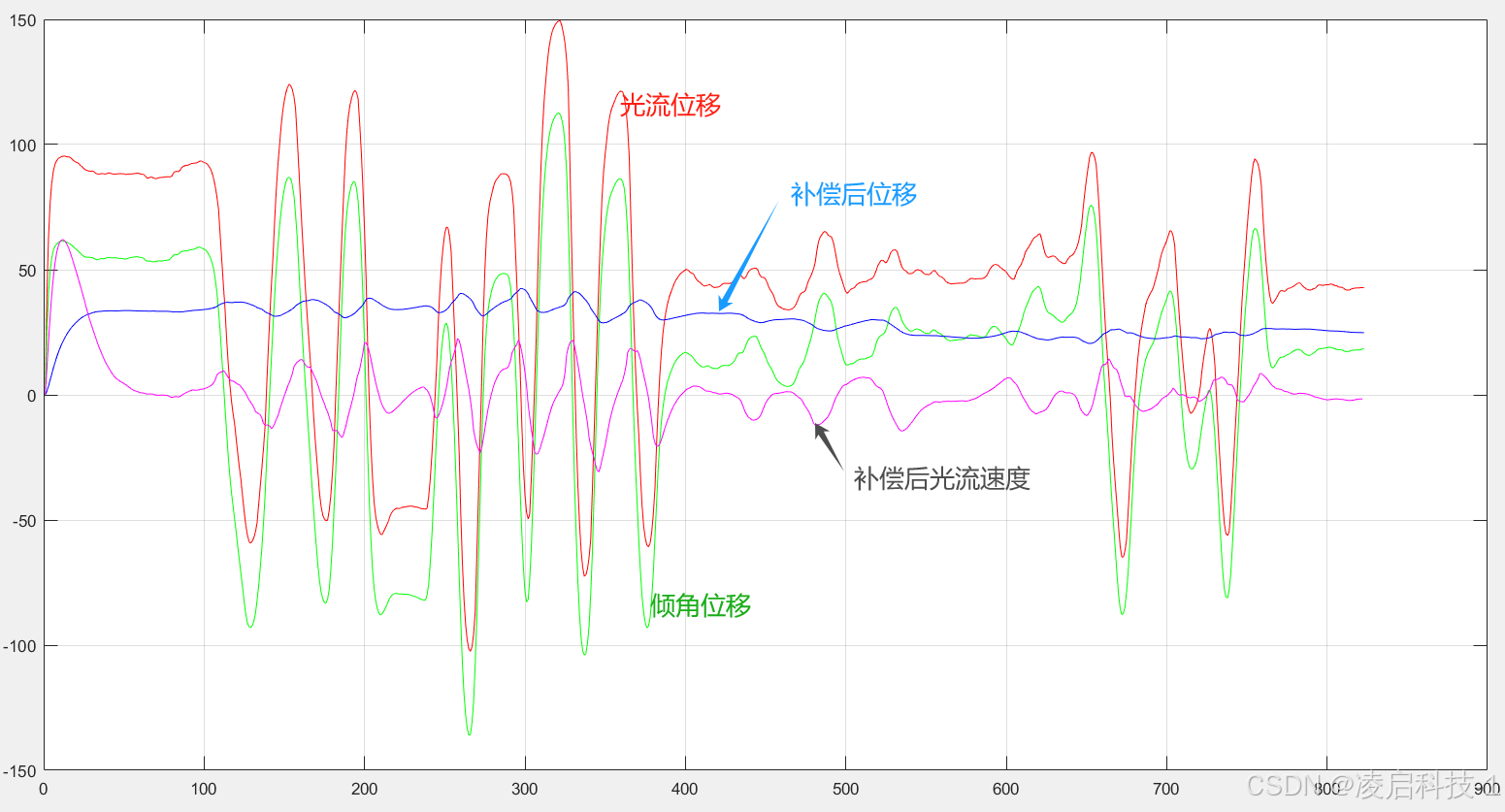
在通过无人机采集光流位移数据和倾角时需要注意,通常无人机的姿态角解算周期远大于光流数据的周期,例如,我们使用的无人机姿态角解算周期为6ms,而使用的光流模块是凌启科技自研的双目测距及光流一体模块,其周期是20ms,也就是50Hz,如果每次接收到光流数据后就实时的获取当前倾角补偿,那最终效果就是倾角位移始终领先光流位移,如图2所示,补偿后结果偏大,另外,在仿真中我们发现,光流位移和倾角位移存在一定的
双目视觉测距原理及应用
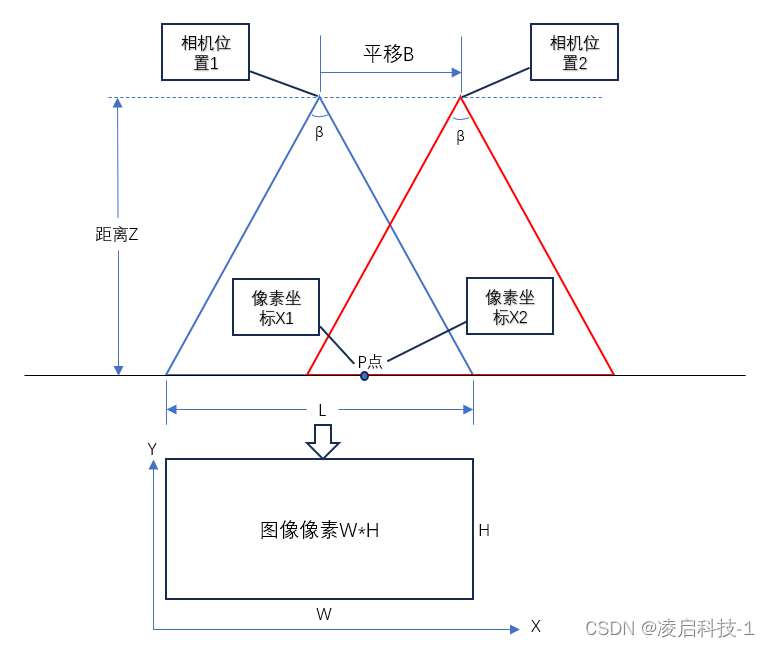
目前大部分双目视觉产品都是求解深度图用于slam建图导航,立体匹配及三维重建等算法算力要求高,在一些只需要简单测距的场景并不适用,如无人机定高定点悬浮,目前市场上常用的测距有激光测距、超声波测距等等,而武汉凌启科技有限公司利用双目视觉像素尺度原理开发了一款光流测距一体模块LQ-S01,如图3,如下图2,相机在位置1,其视场角为β,距离地面Z,拍摄到的地面宽度为L,图片像素为W*H,场景中有一点P,
到底了