
写文章




- @Heibrn
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
从BC到Difussion Policy:机器人动作生成算法入门
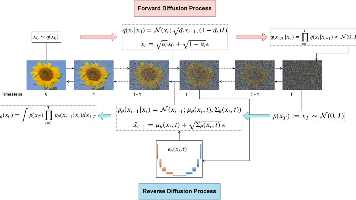
本文介绍了Diffusion Policy(DP)在机器人动作生成中的应用及其原理。首先分析了传统行为克隆(BC)方法的局限性,即单步回归容易将多模态动作分布平均化,导致输出不合理动作。针对这一问题,DP通过扩散模型学习动作分布,能够生成多样化的合理动作序列。 文章详细讲解了DDPM(去噪扩散概率模型)的基本原理,包括前向加噪和反向去噪过程。DP将这一思想应用于机器人领域,在观测条件下生成动作序列
到底了