- @ChaoChao66666
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
使用AI控制器、黑板、行为树初步实现NPC巡逻功能。
5. 再次回到狮子蓝图“Character_Lion”中,我们可以使用“移动到位置”节点来控制NPC移动到指定位置。这样“BP_NPC”的所有派生类中都可以直接使用变量“AIController_NPC”在事件图表中选中“事件开始运行”、“事件Tick”和构造函数,然后右键点击“将调用添加到父函数”,这样子类就是自动调用父类的这些事件。打开“BP_NPC”,在类默认值中,将“AI控制器类”一项设置

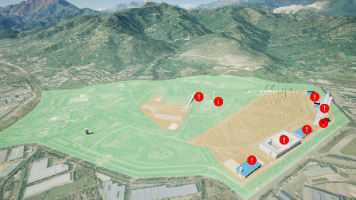
本文介绍了在Unreal Engine中使用Cesium和VaRest插件实现地理围栏区域可视化的步骤:1)准备GeoJSON格式的地理数据;2)创建BP_CesiumPolygonLoader蓝图,通过VaRest读取解析数据;3)利用CesiumCartographicPolygon绘制两种区域(电子围栏淡绿色/风险区域淡红色);4)创建混合材质MLB_Area_Green和MLB_RiskA
【UE5 智慧城市系列】2-通过鼠标滚轮缩放Pawn视角

【UE5 智慧城市系列】1-制作可旋转的Pawn

【UE5 智慧城市系列】4-点击标签,进行视角移动
【UE5 智慧城市系列】3-鼠标左键拖拽位移

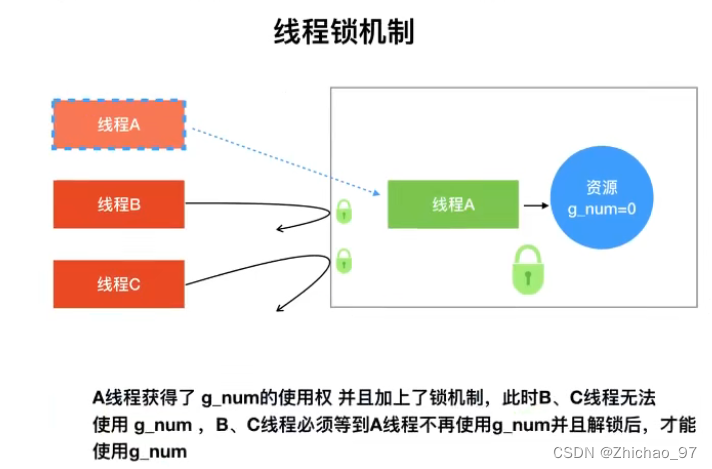
1. 线程的概念1.1 主线程1.2 子线程1.3 单线程与多线程基本示例代码2. 线程的数量3. 线程的参数4. 守护线程5. 并行和并发5.1 多任务的概念5.2 并发和并行的概念6. 自定义线程类7. 多线程共享全局变量8. 多线程共享全局变量的问题9. 同步和异步10. 互斥锁11. 死锁
【UE5 智慧城市系列】5-通过鼠标键盘控制摄像机

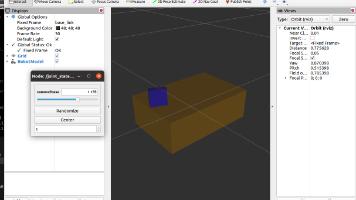
URDF是ROS中用于描述机器人结构的核心XML格式,案例演示了如何创建带旋转摄像头的机器人模型,通过joint_state_publisher_gui节点实现摄像头360°旋转控制