- @BZGLOqgZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
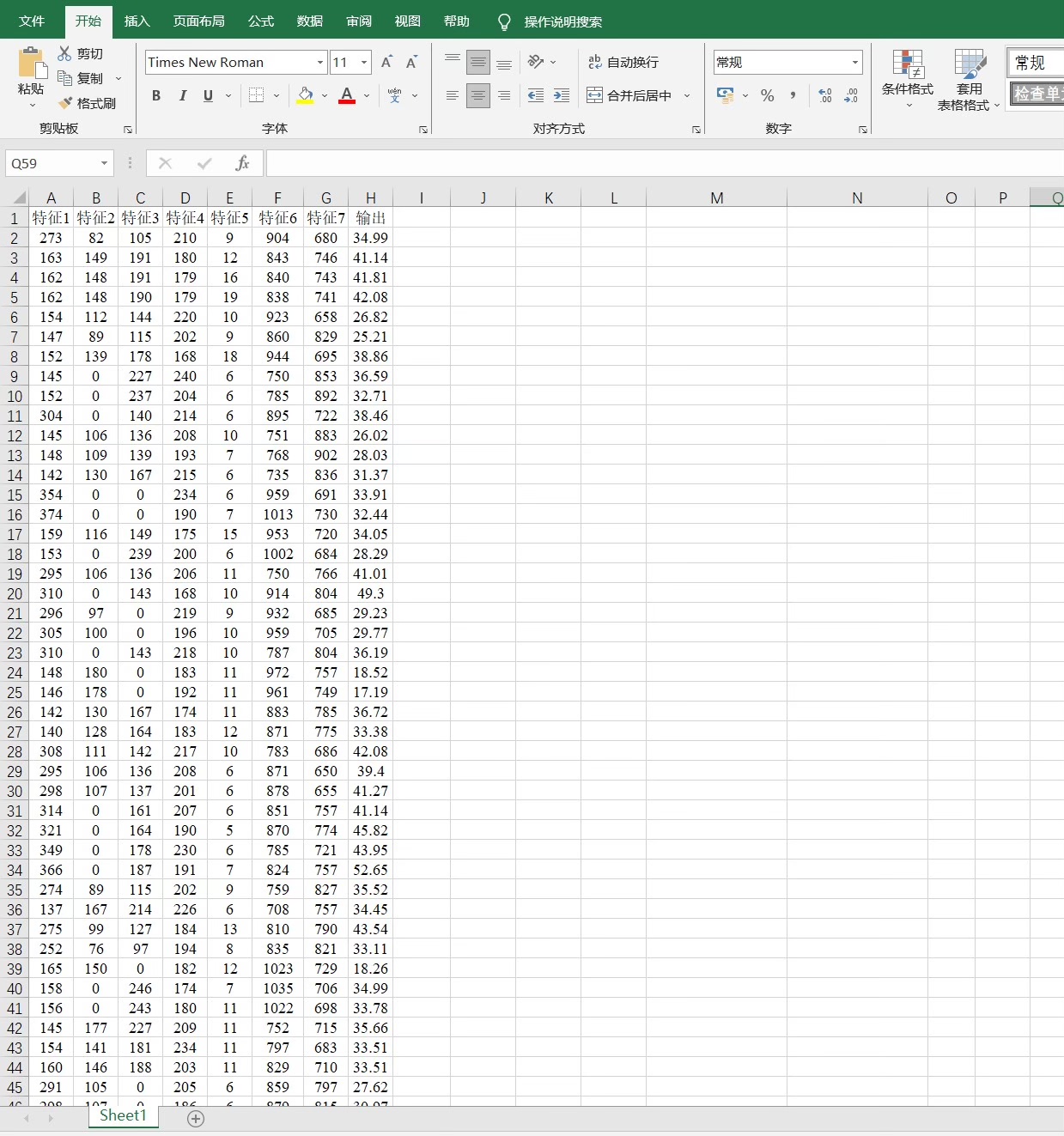
【23年算法】DBO-CNN-BiLSTM-Attention单变量时序预测基于蜣螂优化算法(DBO)优化卷积神经网络(CNN)-双向长短期记忆神经网络(BiLSTM)-注意力机制的数据单变量时序预测(可更换为分类,回归和多变量时序预测,前),Matlab代码,可直接运行,适合小白新手无需更改代码替换数据集即可运行数据格式为excelBiLSTM可以更换为LSTM,GRU等。

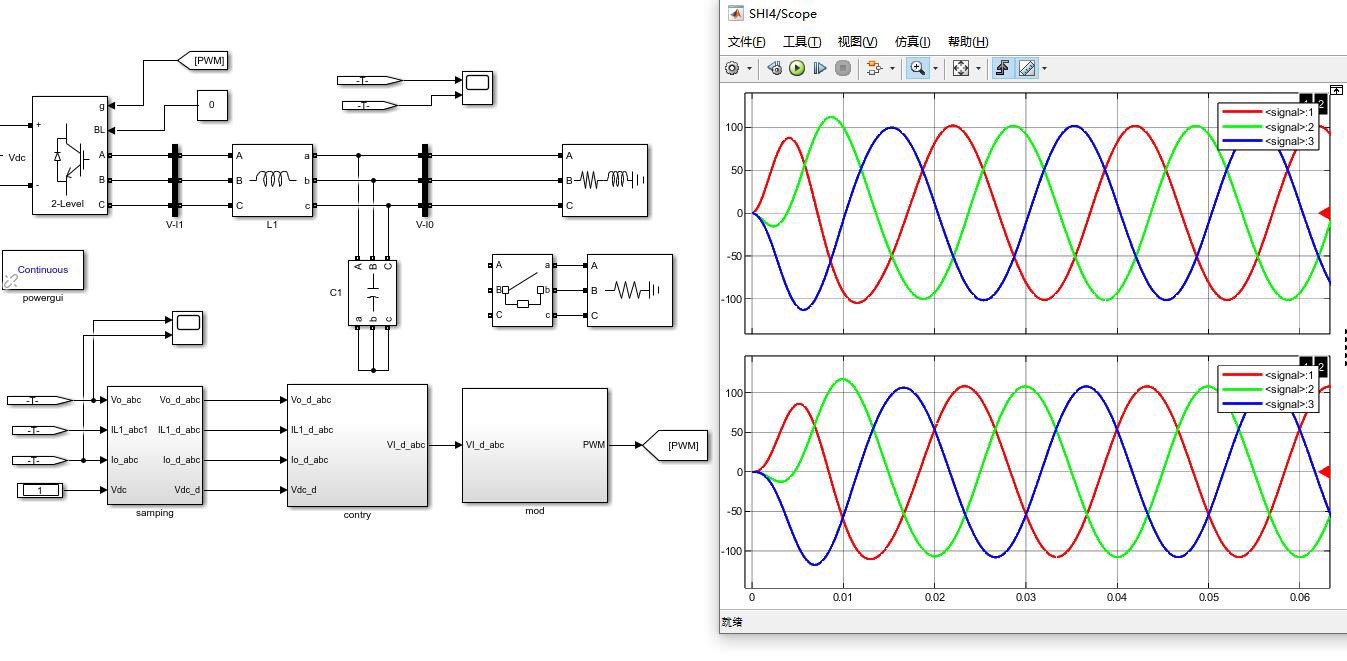
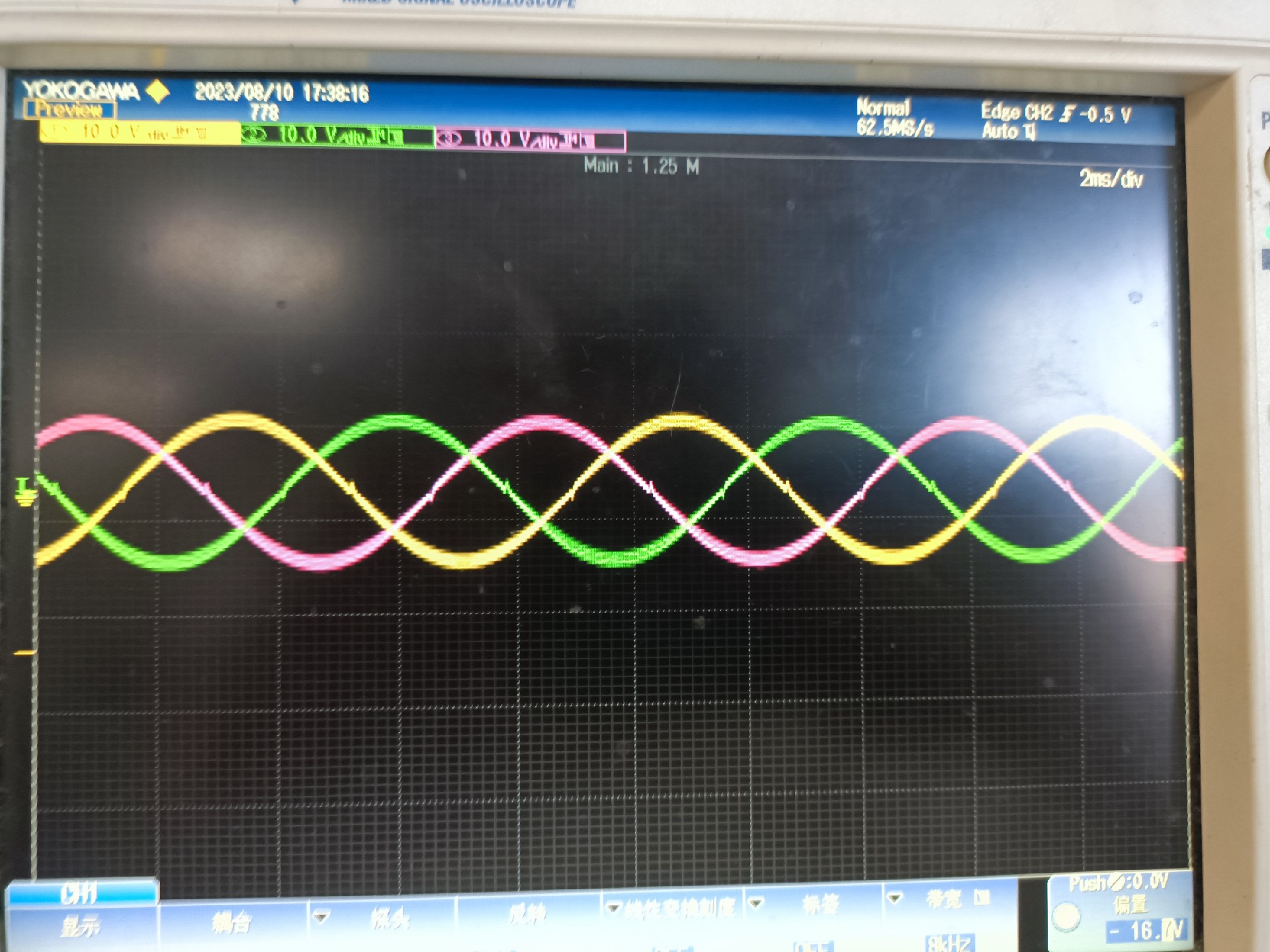
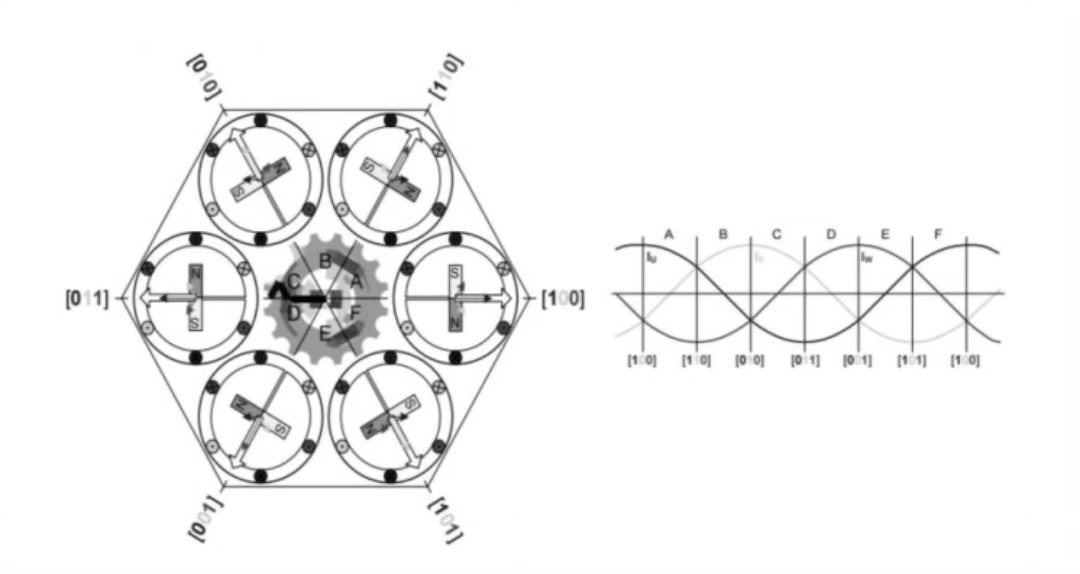
三相逆变器VOC矢量控制电力电子Matlab仿真simulink在电力电子领域,三相逆变器的矢量控制是一项至关重要的技术,而通过Matlab的Simulink进行仿真,能让我们更直观地理解和优化这一过程。今天就来和大家唠唠三相逆变器VOC(Voltage Oriented Control,电压定向控制)矢量控制在Simulink中的仿真实现。
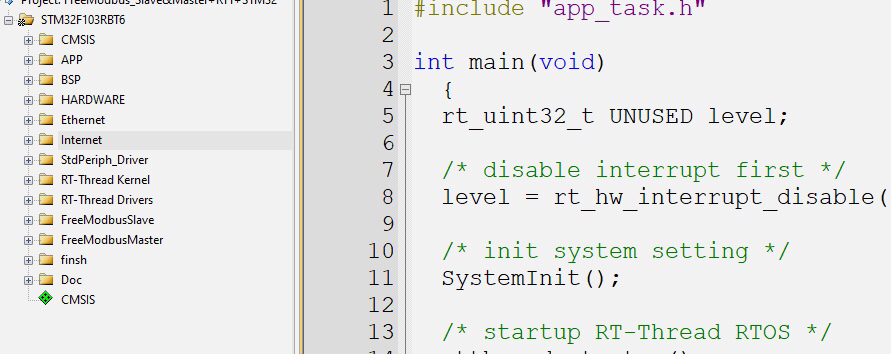
关键是把每个函数的返回值都当祖宗供着,宁可错杀一千也别放过一个异常状态。代码里到处都是if判断虽然看着啰嗦,但稳定性真是拿这个堆出来的。timeout()就像设备的呼吸节奏,没它整个协议栈直接憋死。曾经因为漏了这个函数,DHCP永远卡在获取状态。这里递归重试比while循环更安全,防止堆栈溢出。实测最多重试3次,超过就放弃治疗,避免设备变砖。这个喂狗策略让设备在异常时能挣扎着尝试恢复,实在没救再重
咱们先看外环电压环的PR控制器设置,在Simulink里直接拖出Discrete Proportional Resonant模块,关键参数Kp=2.5,Kr=80,谐振频率设置为314rad/s(对应50Hz工频)。最后提醒新手:负载突加突卸测试别偷懒,至少做20%-80%-20%的阶跃变化,这时候才能看出PR控制器的抗扰动实力。单相相逆变器双闭环控制MATLAB/Simulink模型,外环PR,
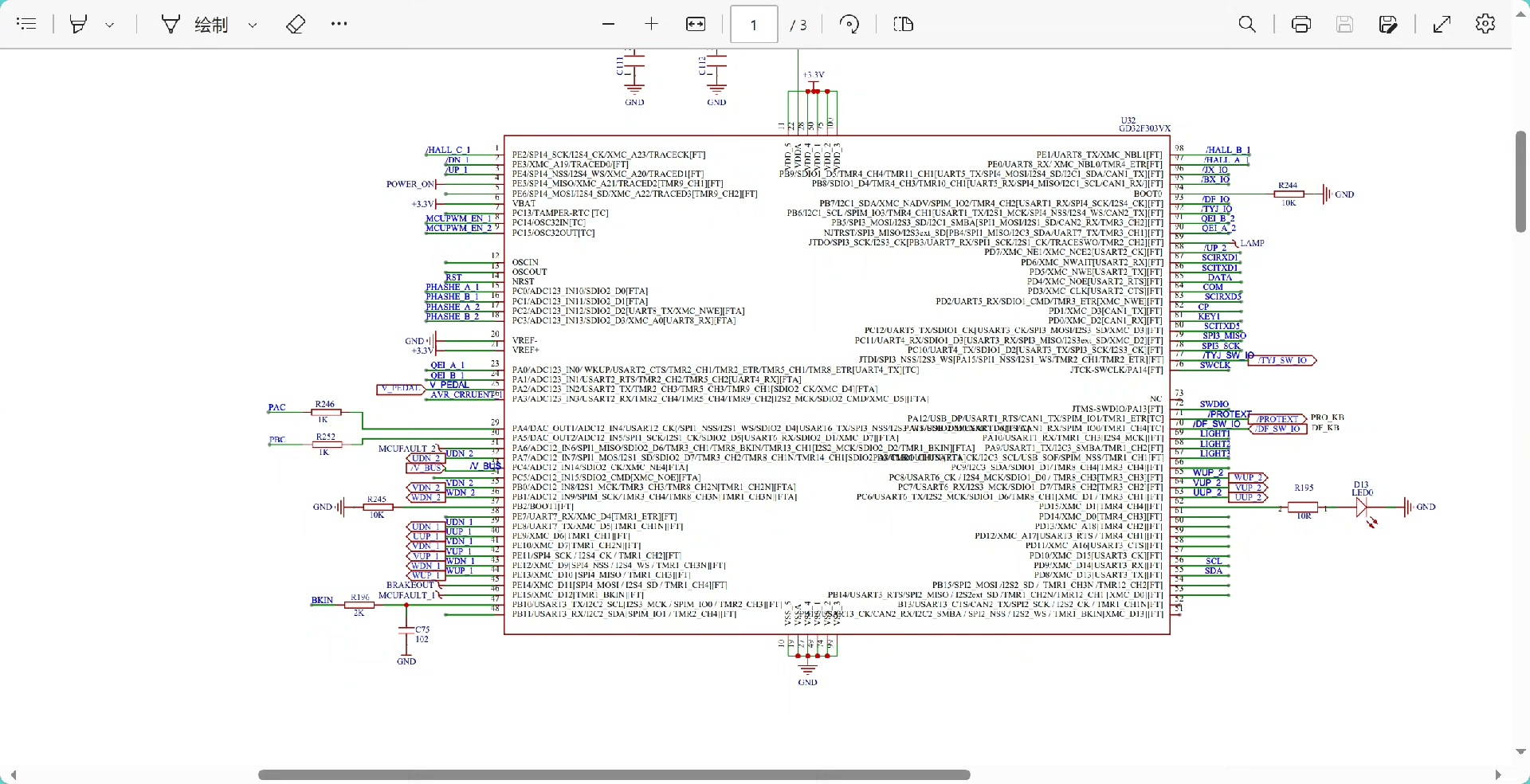
本文档详细说明基于华大HC32L13x系列MCU的无霍尔无刷直流(BLDC)电机控制代码功能。该代码采用脉冲注入法(IPD)实现转子初始位置检测,结合反电动势(BEMF)检测技术实现电机无传感器闭环控制,适用于对成本敏感、空间受限的电机控制场景(如小型风扇、泵体、轻载电机驱动等)。脉冲注入法,持续注入,启动低速运行过程中注入,电感法,ipd,力矩保持,无霍尔无感方案,媲美有霍尔效果。bldc控制器
注意力热力图的解读要注意,颜色深浅代表特征在不同时间步的重要性,可以辅助分析模型关注点。1.多变量单输出,也可替换为时间序列单列预测,粒子群算法也可替换为其他优化算法(如灰狼、蜣螂)。1.多变量单输出,也可替换为时间序列单列预测,粒子群算法也可替换为其他优化算法(如灰狼、蜣螂)。评价指标包括:R2、MAE、RMSE和MAPE等,出图效果如图1所示,可完全满足您的需求。使用粒子群优化的参数为:学习率
原厂方案用的GD32F4,现在直接换AT32F403硬刚,关键是把有感无感方案都打通了,连霍尔信号的处理都没落下。但恰恰是这种不完美的实现,反而更适合学习——你能清楚看到哪些地方需要优化。at32f403版本的汇川MD500E代码,完全版,有感无感都包含,除了数码管显示屏蔽了,别的都移植过去了。at32f403版本的汇川MD500E代码,完全版,有感无感都包含,除了数码管显示屏蔽了,别的都移植过去
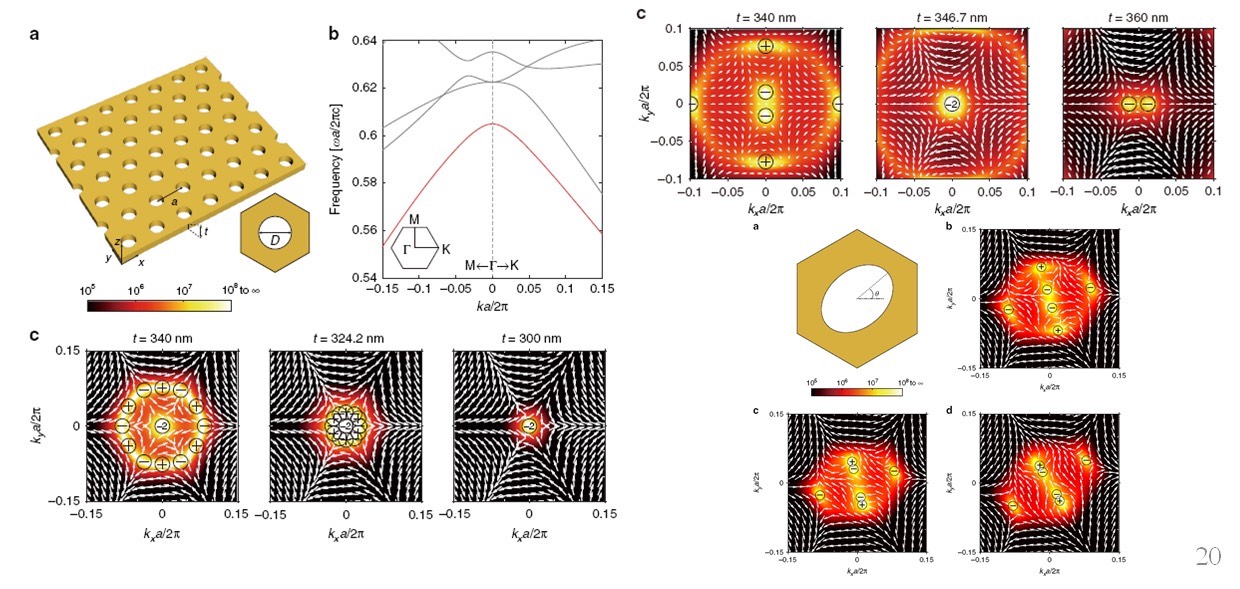
comsol光子晶体仿真。拓扑荷相关。在merging 高阶 BIC,包含三维Q,Q因子计算。远场偏振计算。最近在光子晶体领域的研究中,使用 Comsol 进行相关仿真收获颇丰,今天就来和大家分享一下涉及拓扑荷、merging 高阶 BIC 以及相关计算的 Comsol 仿真过程。
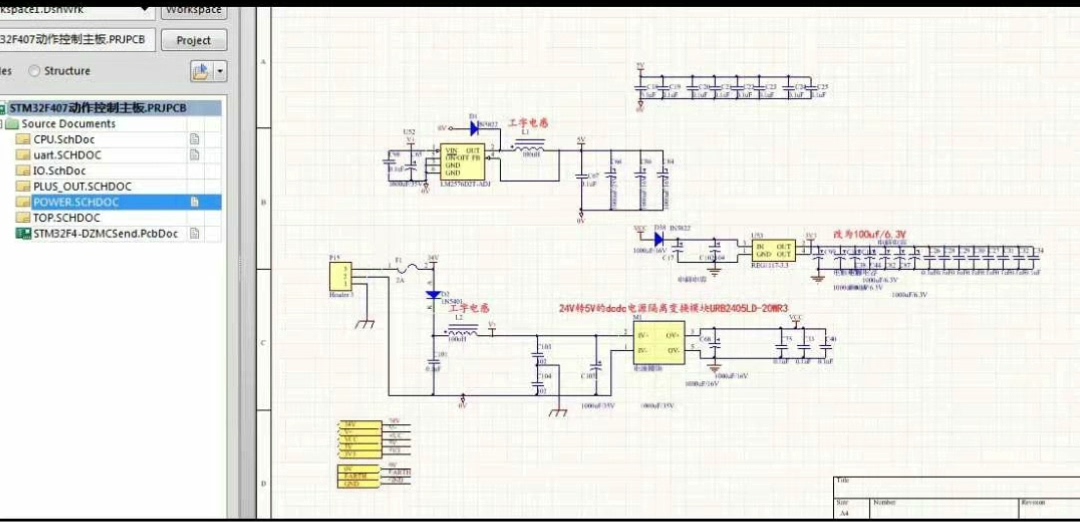
比如,我们可以通过STM32的定时器来生成PWM信号,控制电机的转速和方向。总的来说,STM32F407ZET6主控板凭借其丰富的资源和强大的性能,在工业控制领域有着广泛的应用前景。今天,我们就来聊聊这块板子的一些亮点,顺便插点代码,看看它是如何在实际项目中发挥作用的。比如,我们可以通过STM32的GPIO口来控制继电器的开关状态。最后,这块板子采用24V供电,适合大多数工业环境。通过这种方式,我
通过这次实践,我对FX5U PLC与JE-C伺服电机的通讯有了更深入的理解。虽然过程中遇到了一些问题,但通过查阅资料和实际调试,最终都得以解决。希望我的经验能对正在学习伺服控制的朋友们有所帮助!如果大家还有其他问题,欢迎在评论区留言,我会尽力解答。FX5U和je-C伺服通讯案例和学习资料,绝无仅有。物超所值。