
写文章



- @Azurel_
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
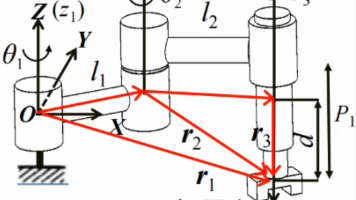
机器人中的雅可比矩阵
本文探讨了雅可比矩阵在机器人速度与力(矩)计算中的应用,以实例分析了雅可比矩阵到底是什么,该如何求,各元素有什么意义等问题。
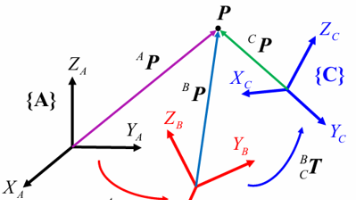
齐次变换与齐次变换矩阵的计算
上一篇文章中,讲到了刚体位姿描述与坐标变换,最终得到了坐标变换的一般形式:,也就是任一点坐标系下的都能描述到极基坐标系当中去。但是可以发现这一个坐标变换被拆为一个矩阵相乘和一个矩阵相加的形式,那么能否将这些操作合并呢?本文就将这一问题进行总结。声明:本文以学习燕山大学-机器人技术课程资料和熊有伦院士《机器人学 建模、控制与视觉》一书所写,主要用于共同学习~ppppp。
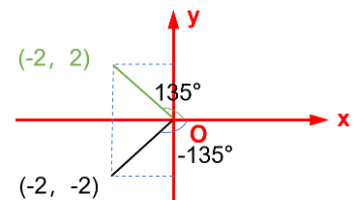
机器人笔记——关于atan2与atan的区别
近期在做关于3R码垛机械臂的运动学解算时,在计算过程中用到了四象限反正切函数(也就是atan2),发现他与atan的使用上是有不同的,所以本文就重点记录两者的区别与使用。前序内容机构自由度的计算齐次变换与齐次变换矩阵的计算机器人正运动学——学习笔记机器人正运动学实例——PUMA560机械臂(附Matlab机器人工具箱建模代码)机器人逆运动学——以六自由度机器人为例(详解、易懂,附全部Matlab代
到底了