
写文章




- @AAAAAB111
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
在ubuntu22.04系统上用pycharm编写第一个ros2程序
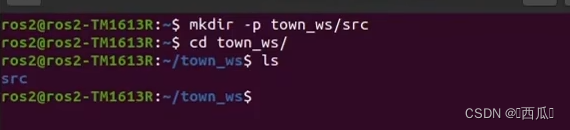
7.进行source,为了让系统找到village_li这个包,找到li4_node这个节点。1.打开终端(快捷键alt+ctrl+t),创建工作空间,工作空间就是文件夹。8.(可选)在终端输入相关指令,查看是否有village_li包。在village_li文件夹右键新建li4.py。10.可以切分终端,输入相关指令查看一些信息。打开pycharm的终端(alt+f12)6.在pycharm终端
到底了