- @A567852
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
机器人四元数是指用四元数来表示机器人的姿态和旋转信息。四元数是一种扩展了复数的数学概念,可以用来表示三维空间中的旋转。在机器人领域,四元数广泛应用于描述机器人的姿态。机器人的姿态通常由位置和姿态角组成,而姿态角可以由四元数表示。四元数可以用来描述机器人在三维空间中的旋转,可以表示旋转的方向和角度。
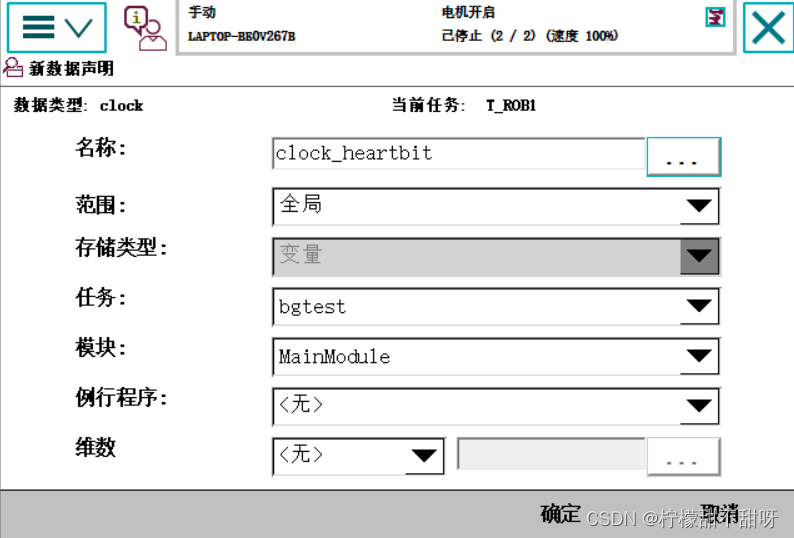
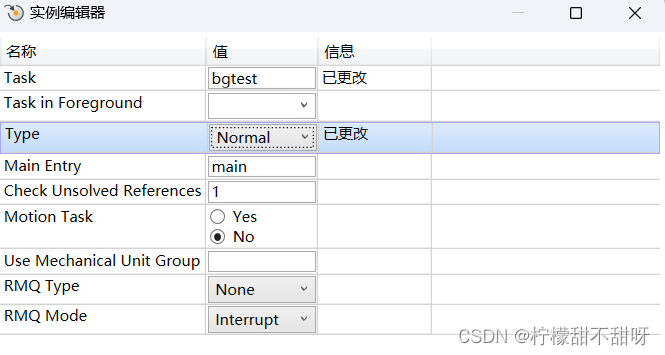
在配置中配置一个机器人物理输出信号作为机器人心跳信号来使用(此处使用robotstudio进行配置)3、设置机器人心跳的频率,这边设置1s的评率对信号进行开闭,那我们信号的转化周期为2s。可见配置对应的机器人心跳io以1s的评率进行开闭。创建一个用于后台task工程使用的时钟变量。创建一个num变量来读取时钟变量里的值。2、读出当前时间变量内部的值。1、添加一个开始时钟的指令。
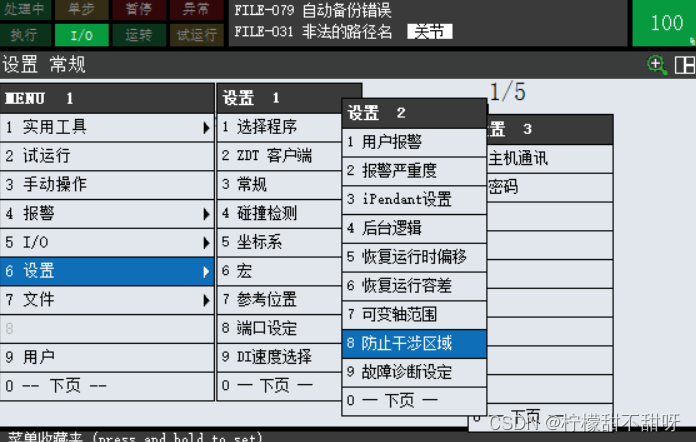
机器人干涉区是指机器人在特定区域中对人类活动进行干涉或协助的区域。这个区域通常是由安全围栏或其他物理设施限定的,以确保机器人与人类之间的交互安全。在机器人干涉区内,机器人可以执行各种任务,如装配、搬运、清洁等。机器人干涉区的设立可以提高生产效率,减轻人力负担,并减少人工操作的错误率。同时,机器人干涉区也需要注意安全问题,确保机器人与人类之间的安全距离和交互方式。简单来说就是机器人在进入特定区域时,
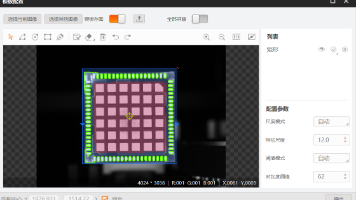
确定机械臂运动过程中是X优先还是Y优先,如果是X优先Y轴坐标需要保持不动Y优先X坐标需保持不动,设置运动偏移(根据识别物体的大小,不要超出特征匹配的范围)要做相机与机器人或者行走轴模组的标定,首先需要确定相机的图像来源,优先配置好相机图像源的参数。生成需要使用的标定文件,在标定转换模块中使用生成的标定文件。触发N点标定模块,没触发一次,图像显示的标定次数就会加1。创建标定所需物体的体征模板,并确认
软PLC,后台逻辑。
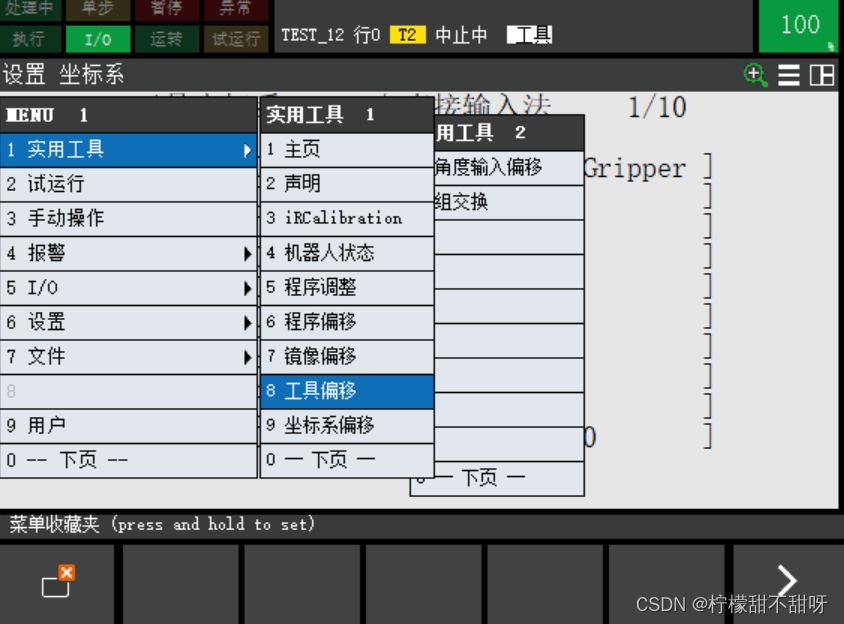
在机器人位置不改变的情况下,工业机器人使用默认工具坐标系示教的一系列运动点位,要保持原本点位位置不变的情况下,改变机器人工具坐标的参数,就要用到机器人坐标转化的功能。在FANUC机器人上体现为机器人的工具坐标偏移的功能。
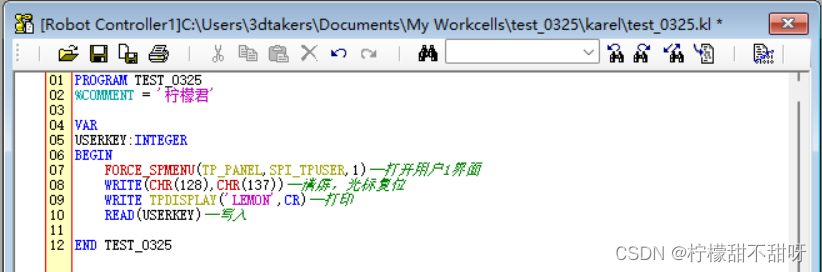
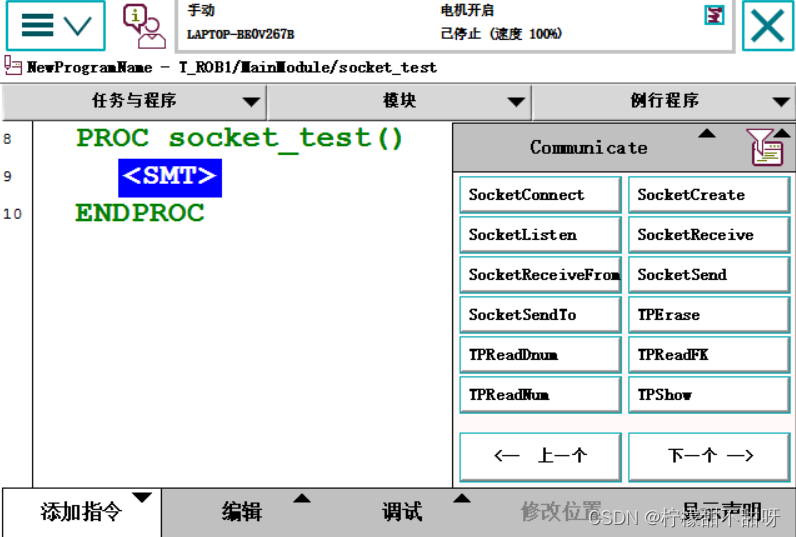
创建一个KL文本来编写FANUC机器人socket连接指令。
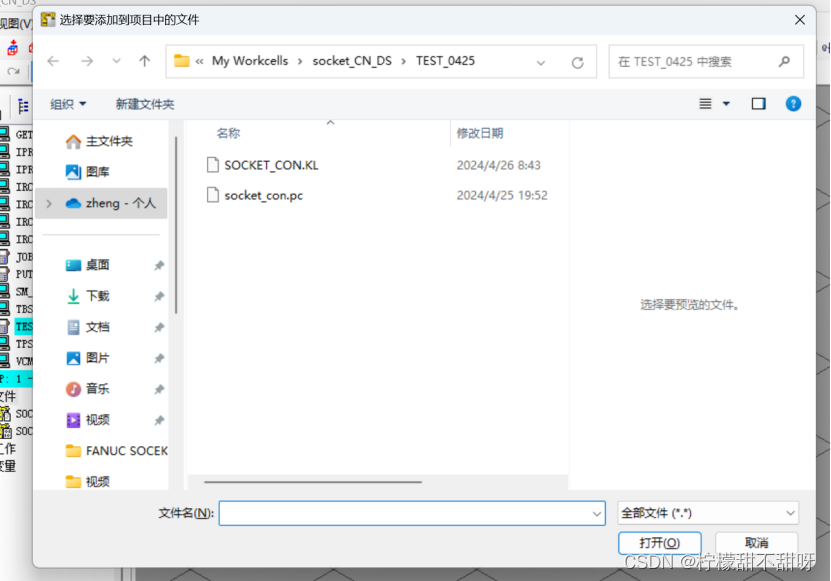
总结来说,客户端是主动发起连接并发送请求的一方,而服务器是被动接受连接并提供服务的一方。需要通讯助手或者ABB仿真软件的小伙伴可以关注私信我!客户端: 客户端是发起通讯的一方,它向服务器发送请求并等待服务器的响应。写入需要连接的服务器的IP地址以及其对应的端口号,这边使用通讯工具创建一个对应的服务器端口。在Socket通讯中,客户端和服务器是两个不同的角色,它们在通讯过程中有一些区别。服务器通常是
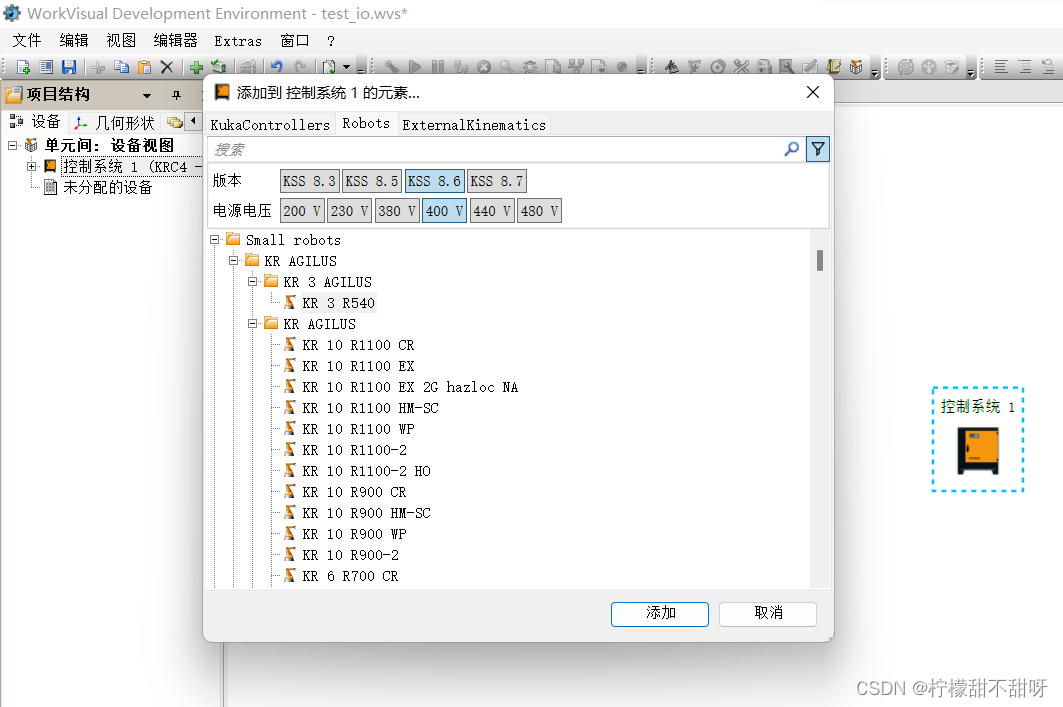
4、分配对应个数的io信号完成后进行软件的编译和下载,即可应用到实体kuka机器人中。1、打开输入输出端,左侧点击KRC输入,右侧点击现场总线中的EIP通讯。3、数字输入对应的数字输入,数字输出对应的数字输出,进行io的连接分配。3、分配对应的ip地址、从站的名称以及对应输入输出引脚的个数。1、点击备选软件包管理,添加EIP通讯的软件备选包到软件中。2、在编辑器中对信号进行分割,右键页面点击分割所
FANUC机器人keral语言编程结构如下图所示:Keral指令对应的基础用法如下所示:依照对应的karel语法写写入下列程序运行对应的程序进行测试: