- @2504_94281097
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
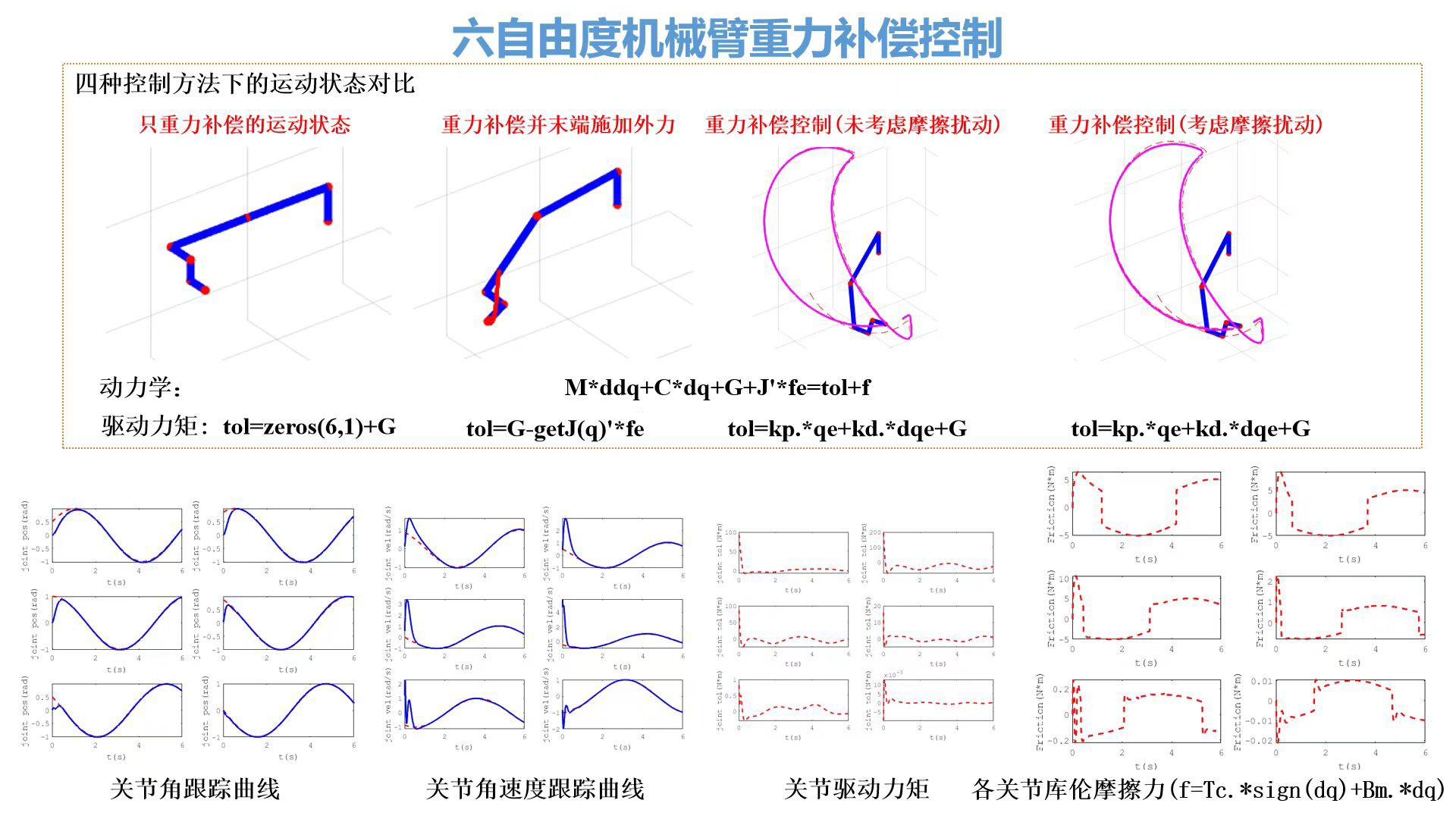
就像健身房的史密斯架,参数准不准直接决定机器人会不会"闪腰"。拿UR5机械臂举例,第二关节的质心坐标可能是[0.12, 0, 0.25],这个毫米级的误差能让补偿力矩偏差10N·m以上。今天咱们用Python撸个简化版重力补偿代码,顺便拆解工业机械臂的"反重力"秘密。好的控制策略应该像电梯的紧急制动,在断电瞬间仍能保持补偿力矩0.5秒缓冲——这可是某大厂用三台报废机械臂换来的经验。当机械臂从垂直接
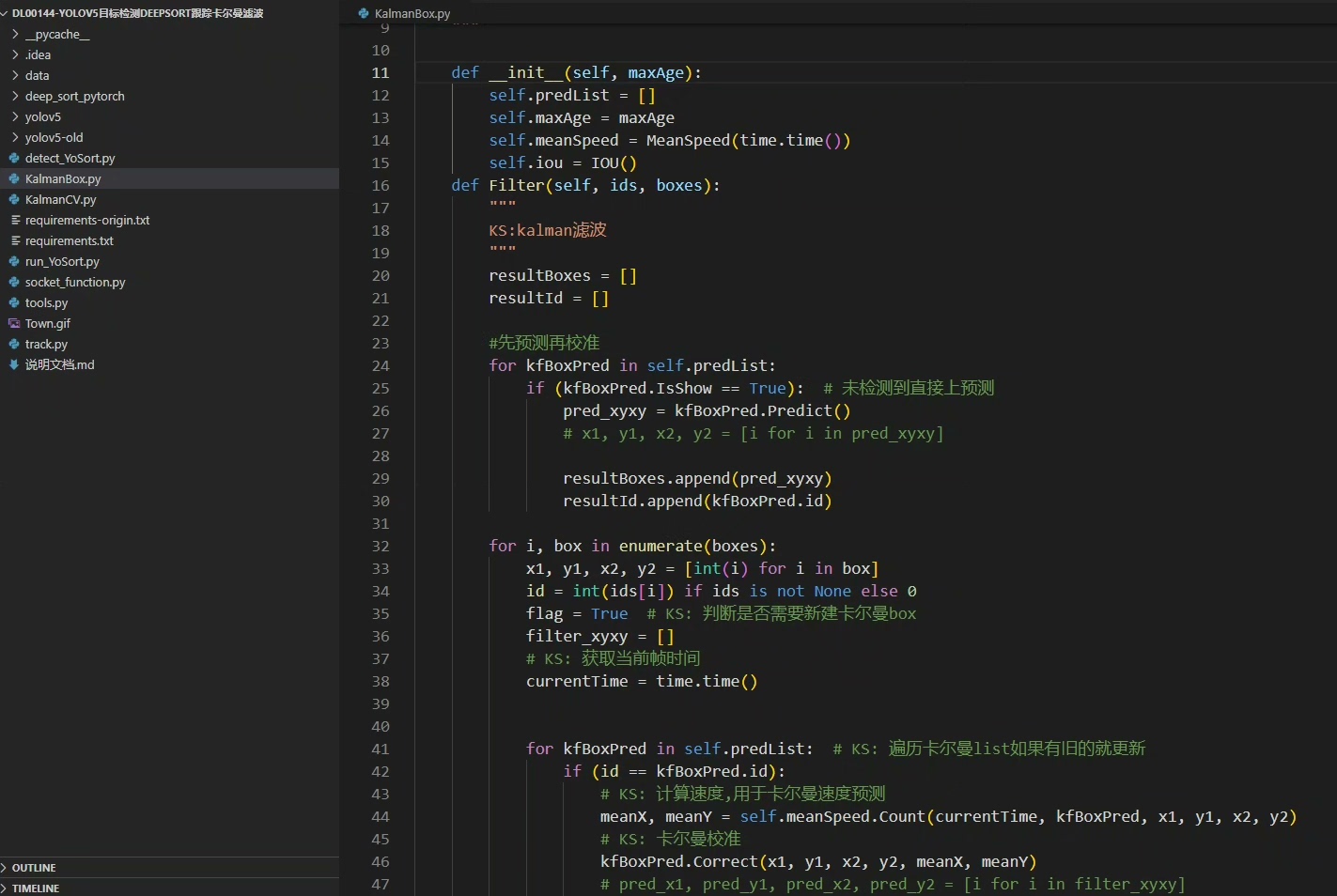
实测在无人机航拍场景中,目标ID维持准确率提升了23%,框坐标抖动幅度减少了60%以上。在目标跟踪项目中,最让人头疼的莫过于检测框疯狂抖动和ID随机切换。当目标运动速度较快时,适当增加预测值的权重,相当于给检测框加了个低通滤波器。模式时,系统每隔30帧才做一次完整检测,其余时间仅靠卡尔曼滤波进行运动推演。这样即使某个目标被短暂遮挡,当其重新出现时,系统会优先匹配运动轨迹最连贯的ID,而不是随便分配
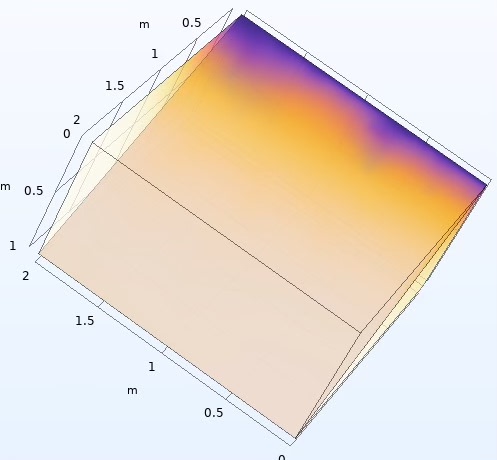
但有意思的是在东北角突然出现条"高速公路"——这就是咱们预设的高斯通道在起作用。用后处理算个流量分布直方图,会发现约80%的流量集中在不到20%的区域内,这比二八定律还夸张。建议用边界层网格+自适应加密,就像给裂隙面做光子嫩肤——该粗糙的地方粗糙,该细腻的地方必须细腻。咱们今天用COMSOL玩点有意思的——把裂隙面整得粗糙不平,再让渗透率像川剧变脸似的随机变化。岩体裂隙渗流,考虑裂隙接触(渗透率低
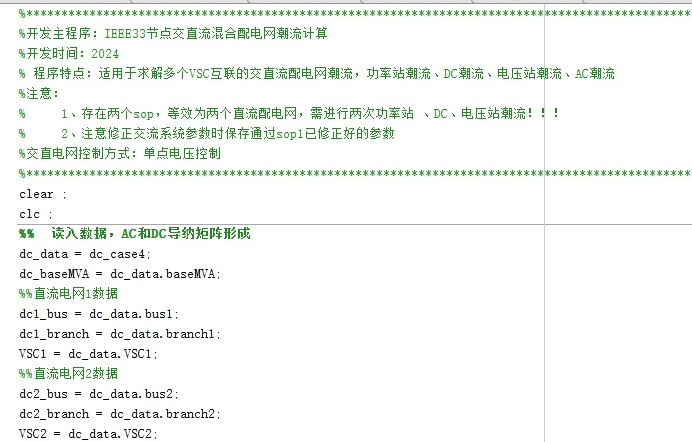
今天咱们要拆解的这套IEEE33节点系统,左边是18节点的交流电网,右边是15节点的直流电网,中间通过VSC换流站咬合在一起。这套算法的优势在测试中表现明显:当光伏出力在直流侧突然变化20%时,交替迭代法能在5个周期内重新收敛,而完全耦合的牛顿法则需要重构整个雅可比矩阵,耗时反而更长。传统交流潮流用的牛顿法,但混联系统里要注意:每个VSC连接的交流节点都会产生额外的耦合项。有趣的是,前3次迭代通常
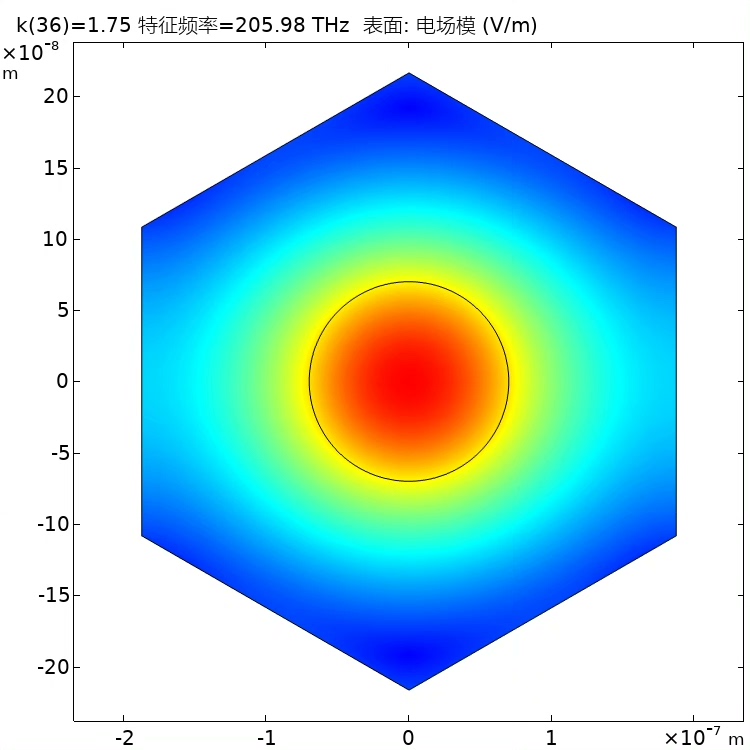
注意ky_points的数量别设太大,否则特征频率求解器可能报特征值丢失——尤其是当介质柱占空比过高时。最后秀张典型的TE极化能带图(想象此处有图):低频区域出现明显的带隙,在0.3-0.4c/a频率范围内模式密度骤降。但要注意,这里假设介质柱是完美硅材料(ε=12),实际材料色散会让计算复杂度翻倍。遇到过有人把虚部全当损耗分析,结果发了篇漏洞百出的论文,这事咱得避免。实际操作中发现,当扫描波矢到
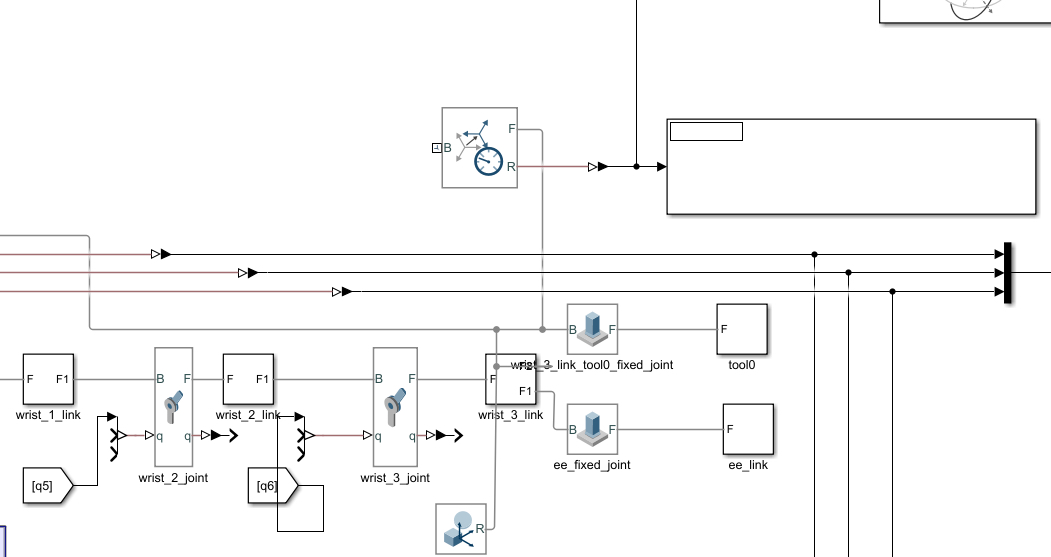
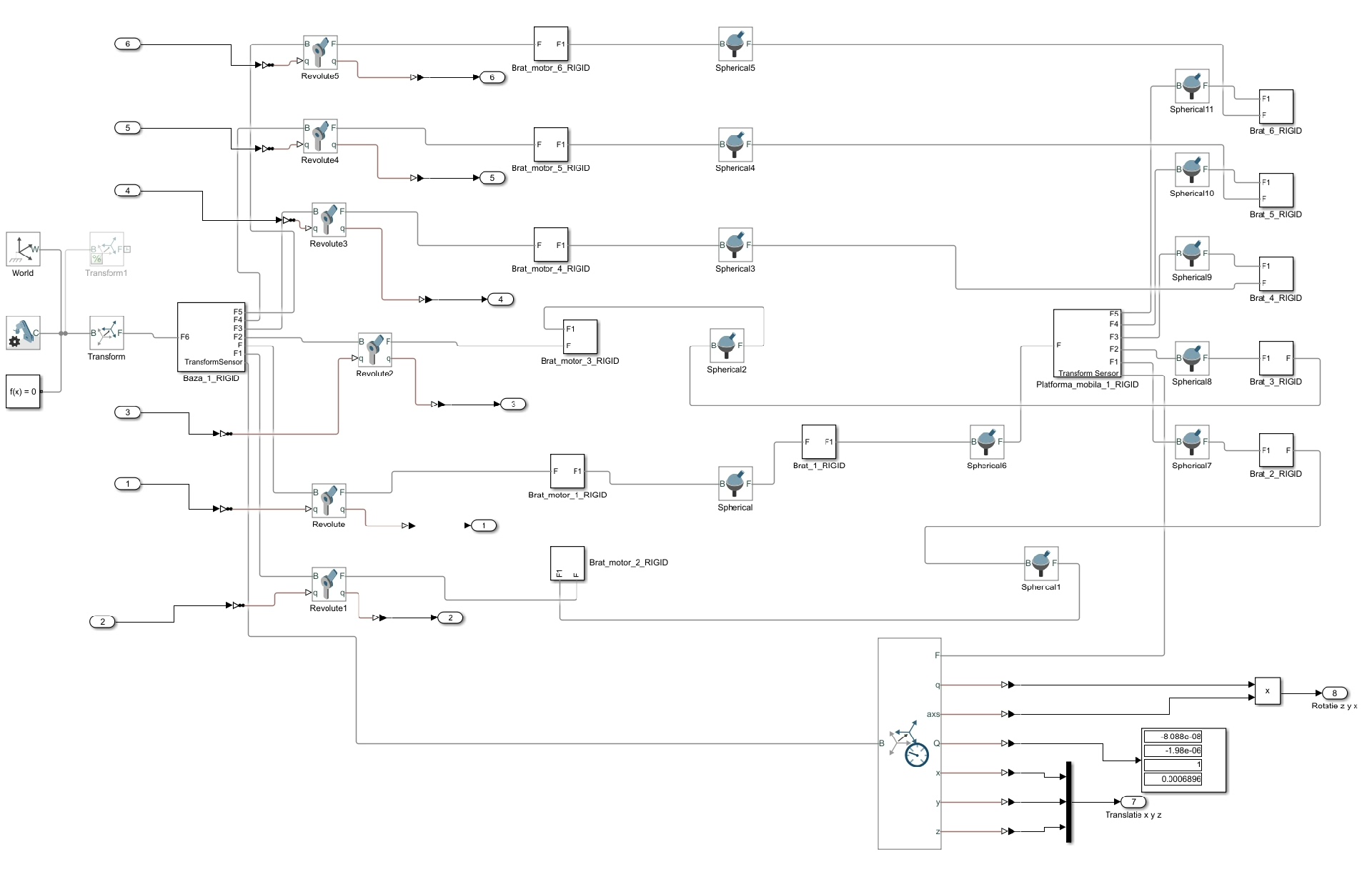
在Simulink里搭建物理模型时,记得在Configuration Parameters里把Solver选成ode15s——刚性系统专用求解器,否则仿真速度能让你等到怀疑人生。先来张全家福:Simulink搭建物理模型,机器人工具箱负责算法验证,Simscape实现多体动力学——这组合拳打起来是真香。仿真时发现个有趣现象:同样的轨迹规划,在理想模型和物理模型中的关节扭矩能差出20%。注意每次逆解
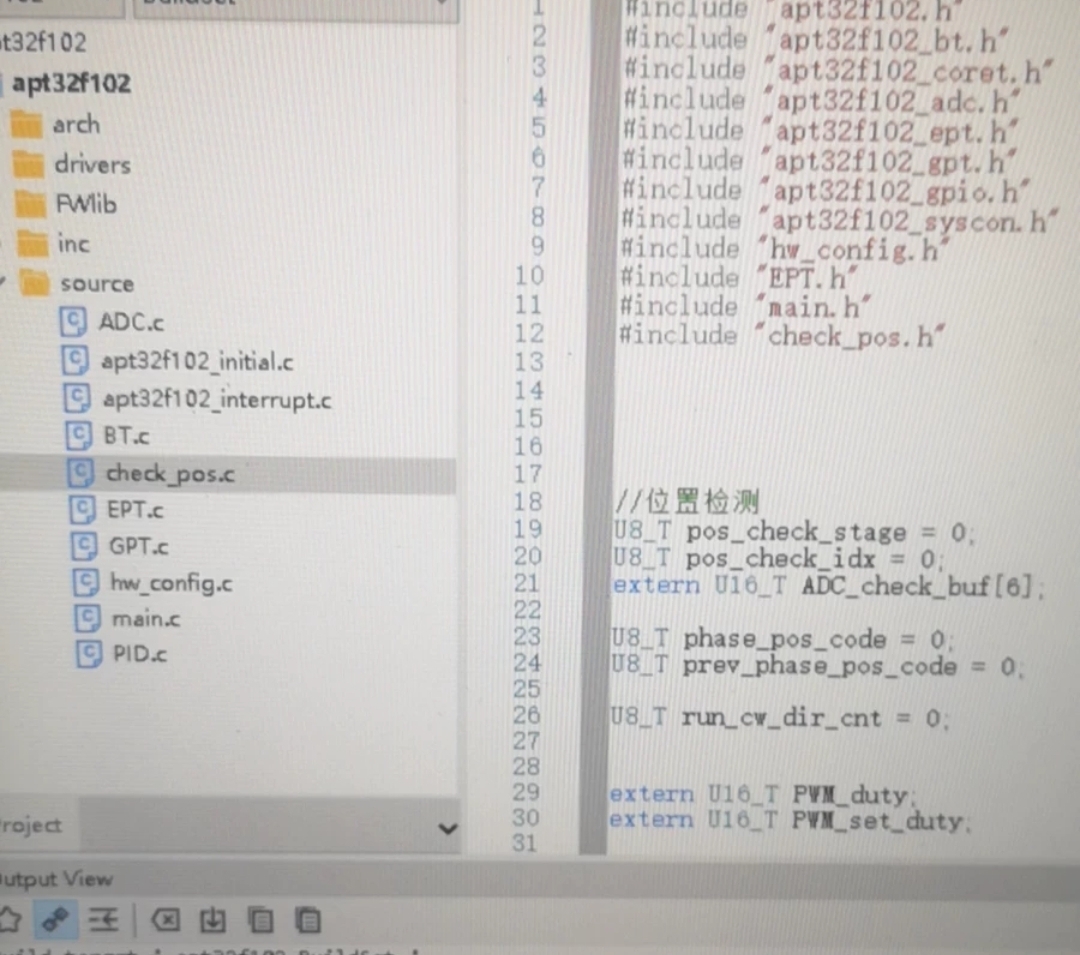
先看硬件配置,APT32F1023这颗国产MCU真香——72MHz主频带硬件乘除法器,6路PWM互补输出自带死区控制,关键是有个16位高精度ADC。这套方案跑起来后,实测效率比之前用的STM32方案高了3%,看来APT32F1023的PWM死区控制确实精准。最后提醒下PCB布局:高压部分和信号地要分区域布局,MOS驱动信号走线尽量等长,软件上做好过流保护,别问我怎么知道的(烟雾报警器响了两次...
斯图尔特机器人Stewart平台 并联机构仿真 逆向运动学 simulink simscape①首先在Solidworks中设计并导入 Matlab Simscape Multibody;②设计控制算法并在Simscape进行验证;③附带嵌入式代码:采用Arduino Uno、6 个步进电机和 3 个电感传感器完成。Simscape Multibody 模拟 6 个基本运动:X 轴平移、Y 轴平移
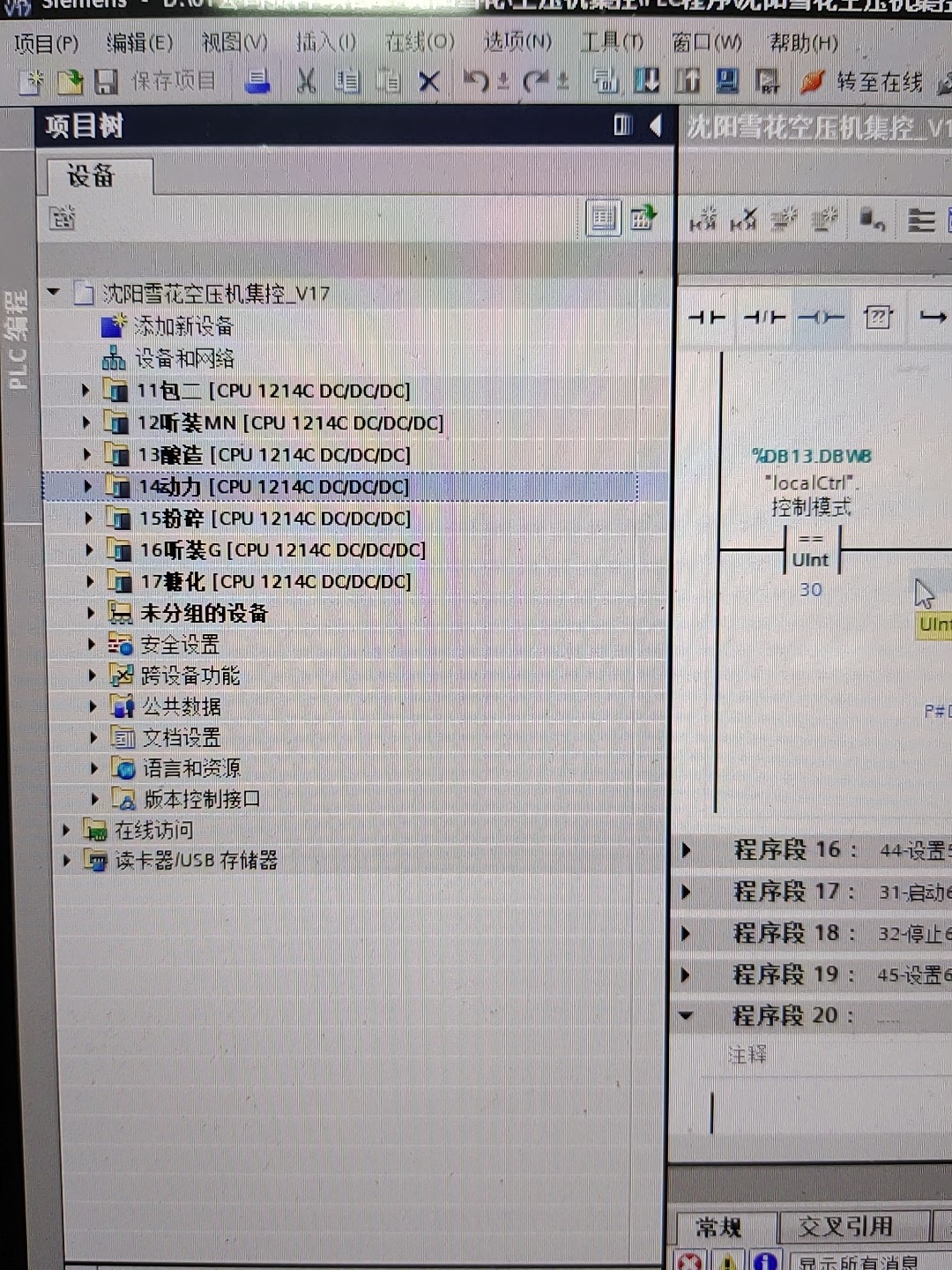
一套空压机集中控制系统,一共19台阿特拉斯空压机,分为7个空压站配套的winccwimCC7.5开发底层采用PLC通讯,博途V17开发整套系统包含:1.上位机程序2.plc程序(带备注)3.硬件物料清单网络结构图项目组态有科技感,可以套用在任何项目上作为模板,界面美观最近搞了一套超厉害的空压机集中控制系统,必须跟大家分享一下。这套系统管理着 19 台阿特拉斯空压机,它们分布在 7 个空压站里。想象
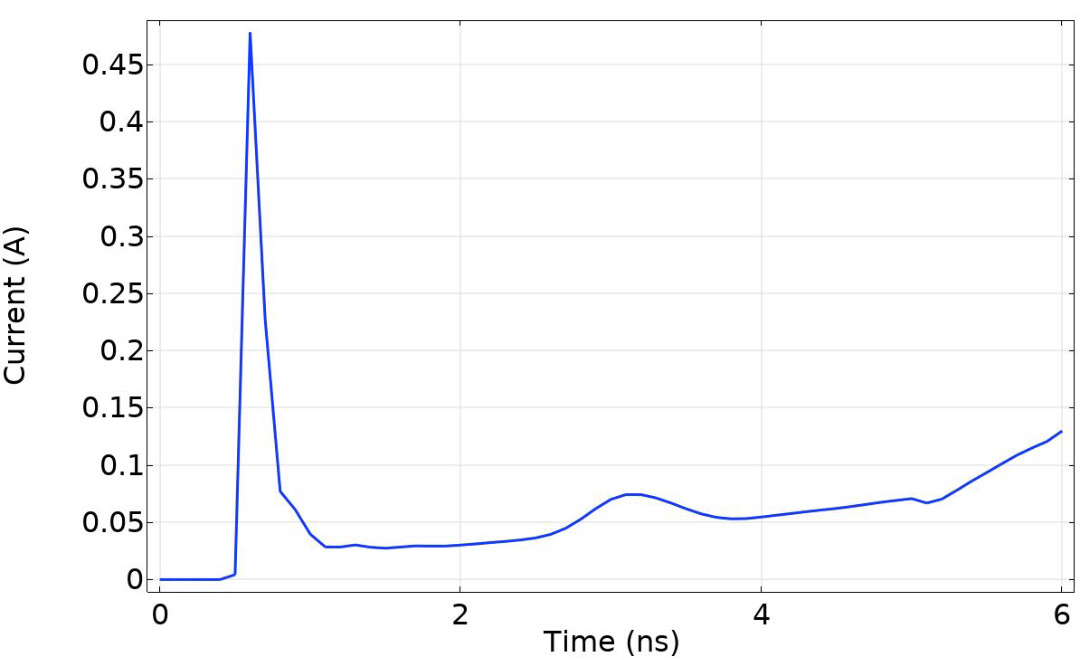
然后呢,就是关键的物理设置部分啦。这个模型是基于等离子体模块构建的,里面包含了多种化学反应以及Helmholtz光电离过程,感觉对相关领域的研究很有参考价值,所以迫不及待来和大家分享一下😃。这里的 \( n \) 可能代表某种粒子的密度,\( D \) 是扩散系数,\( \nabla^2 \) 是拉普拉斯算子,\( S \) 则可能是与光电离相关的源项。[COMSOL针-针电极空气流注放电模型]