- @2503_93975261
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
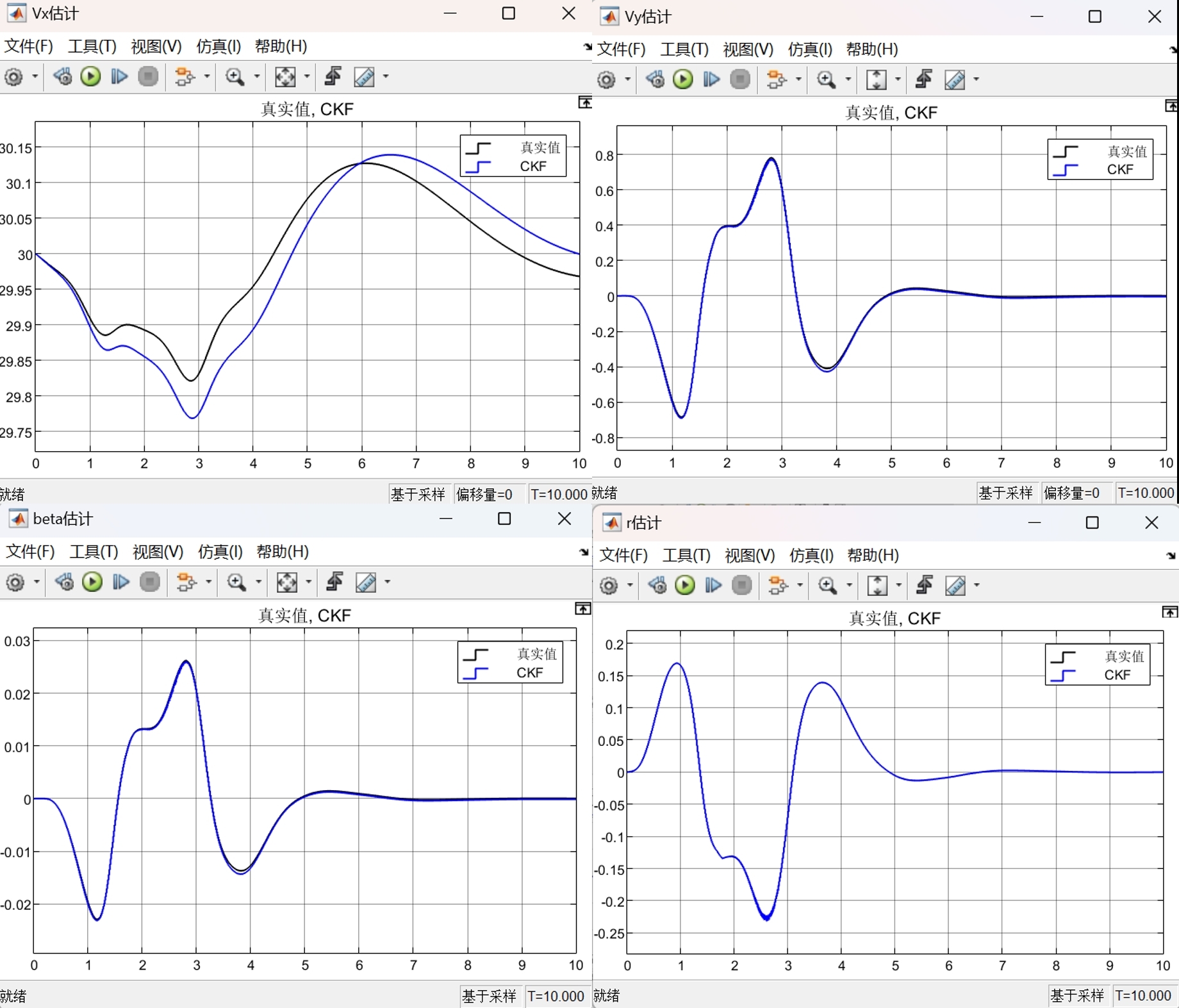
分布式驱动车辆状态估计模型基于Carsim和simulink联合仿真,首先建立分布式驱动车辆轮边电机模型,并使用pid对目标速度进行跟踪,随后在使用级联滑模观测器(ASMO)和车轮运动模型对轮胎力进行观测的基础上,使用UKF/SRCKF算法对侧向车速,纵向车速,横摆角速度,质心侧偏角进行估计。当咱们玩分布式驱动电动车状态估计的时候,就像在拆一辆会跑的俄罗斯套娃——每个轮子的电机都得单独建模,还得让
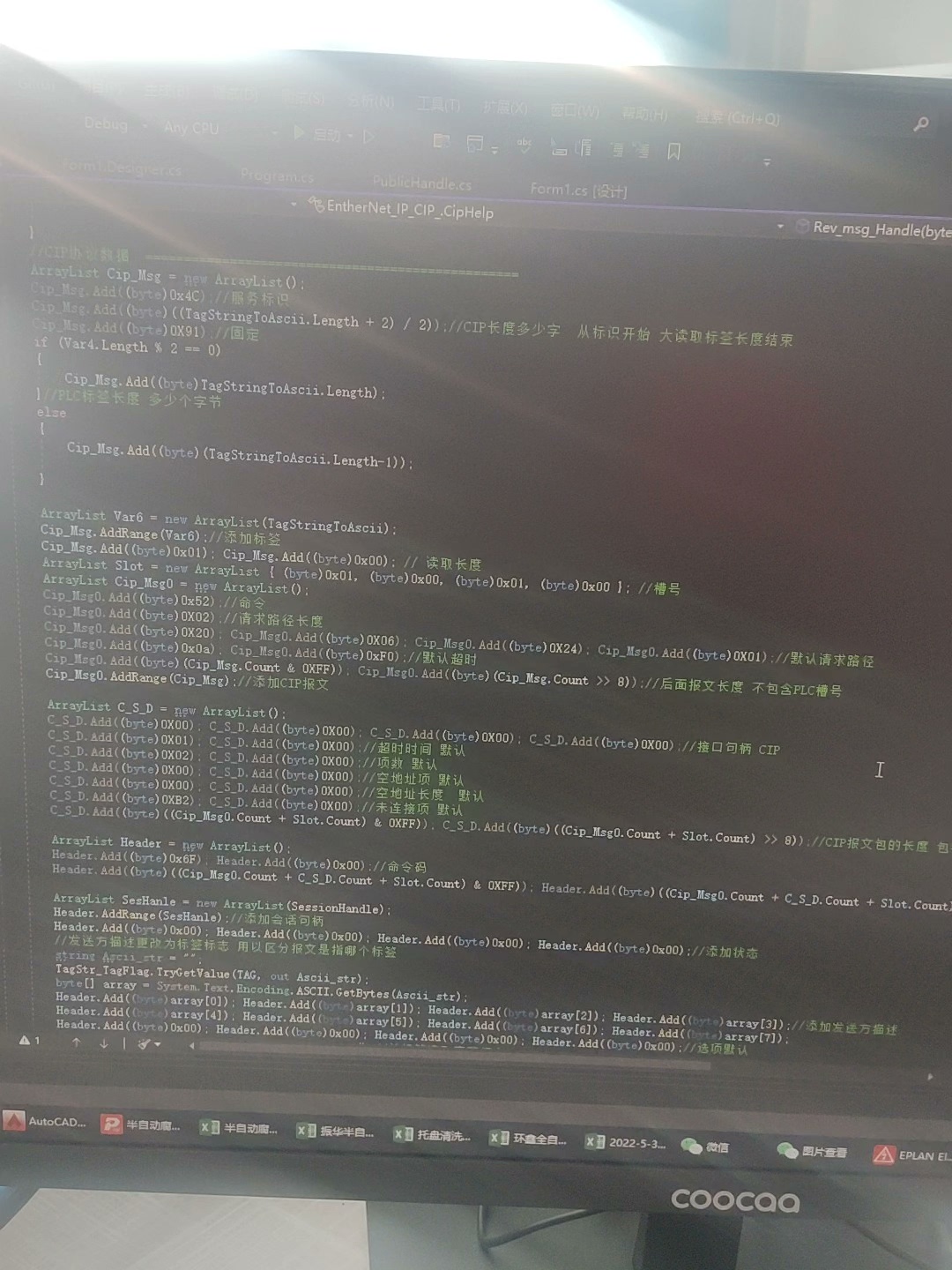
C#编写CIP通讯源码,欧姆龙NX1P通讯DEMO。
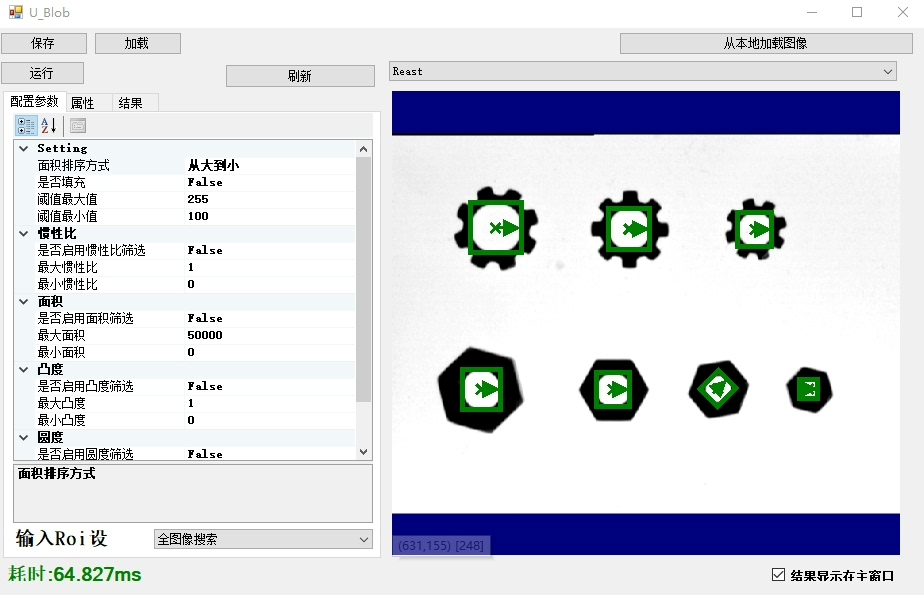
最近在做个工业视觉检测项目时,发现WinForm自带的PictureBox控件完全不够用。客户要求实时显示摄像头画面还要标出圆形瑕疵,这逼得我不得不撸起袖子造轮子——用C#自定义控件整合OpenCvSharp实现找圆功能。这里有个坑要注意:直接修改PictureBox的尺寸会导致图像变形,所以我在Resize事件里动态计算缩放比例。这比写复杂的逻辑判断省事多了,果然参数调优才是OpenCV的正确打
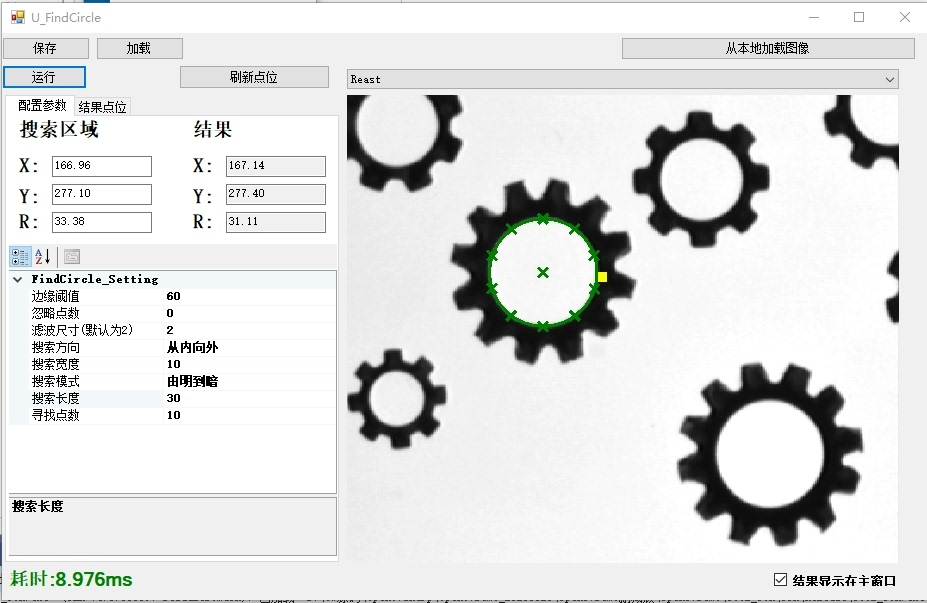
OpencvSharp是OpenCV在.NET平台上的封装,它允许开发者在C#中使用OpenCV的图像处理功能。相比直接使用OpenCV的C++接口,OpencvSharp更加简洁易用,同时保留了OpenCV的核心功能。// 创建一个窗口用于显示图像// 读取图像// 转换为灰度图像// 显示图像为了更好地展示和操作图像,我决定创建一个自定义的Windows Forms控件。这个控件需要支持图像的
(FEKO ISAR RD成像)feko仿真单站RCS,使用其导出的.ffe数据,基于MATLAB进行RD算法的ISAR成像。可以直接运行出结果,适合初学者参考和学习!从feko仿真到ISAR成像,全流程数据和代码资料里包括:1、feko仿真工程文件2、.ffe文件3、ffe文件读取MATLAB代码4、ISAR成像MATLAB代码,详细注释由于篇幅限制,我将无法直接提供一个完整的文章,包括feko
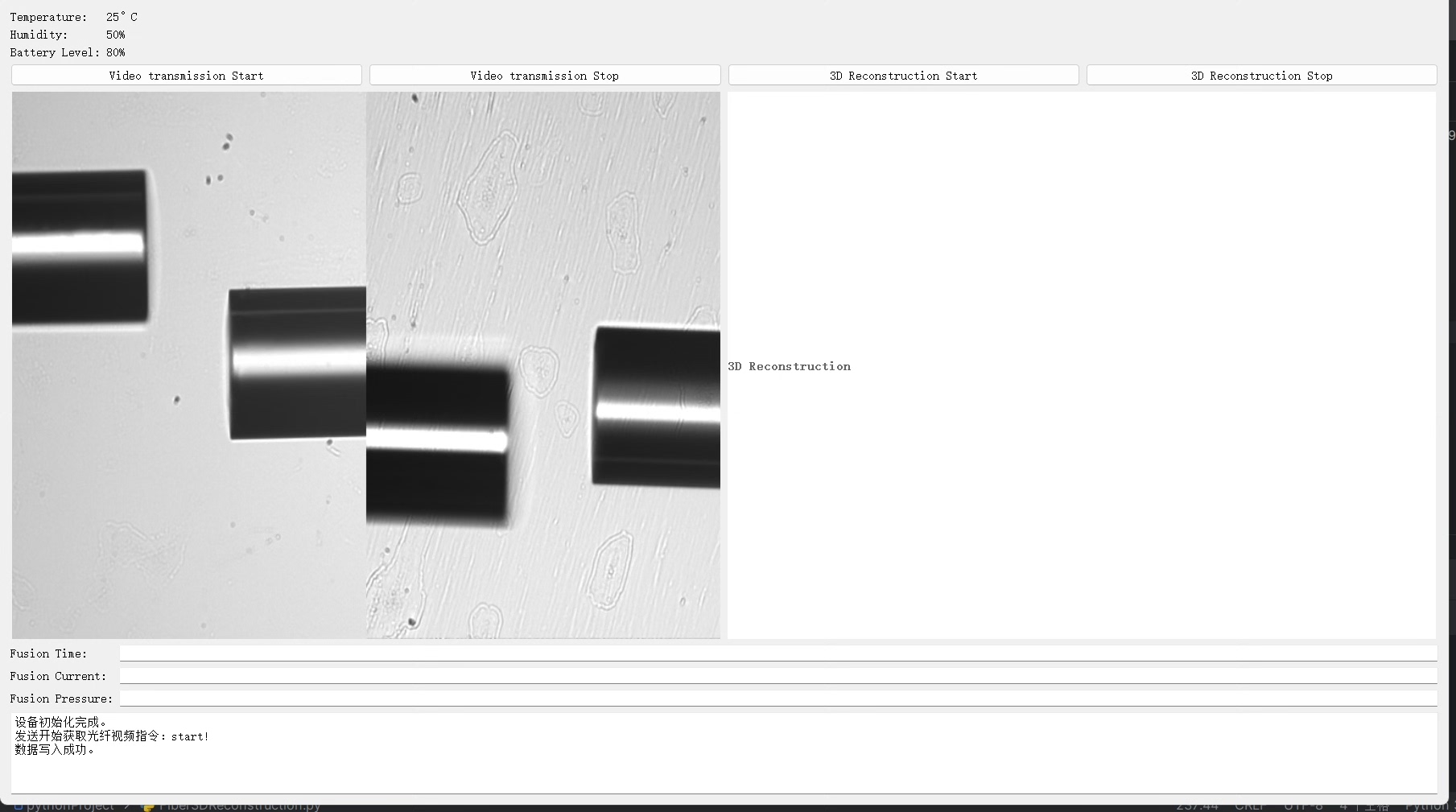
先看硬件连接,USB接口的DP/DM直接怼到PS端的USB0引脚(Bank0的MIO28/29),5V供电直接从开发板取。重点在于PS端的驱动实现,Xilinx官方库虽然提供了USB框架,但直接拿来用会发现根本抓不到设备——这里有个坑:需要手动设置PHY初始化参数。其实这颗芯片的PS端自带USB 2.0控制器,不用外挂芯片就能玩转摄像头,实测OV5640这类常用模组都能直接驱动。注意摄像头输出的是
(FEKO ISAR RD成像)feko仿真单站RCS,使用其导出的.ffe数据,基于MATLAB进行RD算法的ISAR成像。可以直接运行出结果,适合初学者参考和学习!从feko仿真到ISAR成像,全流程数据和代码资料里包括:1、feko仿真工程文件2、.ffe文件3、ffe文件读取MATLAB代码4、ISAR成像MATLAB代码,详细注释由于篇幅限制,我将无法直接提供一个完整的文章,包括feko
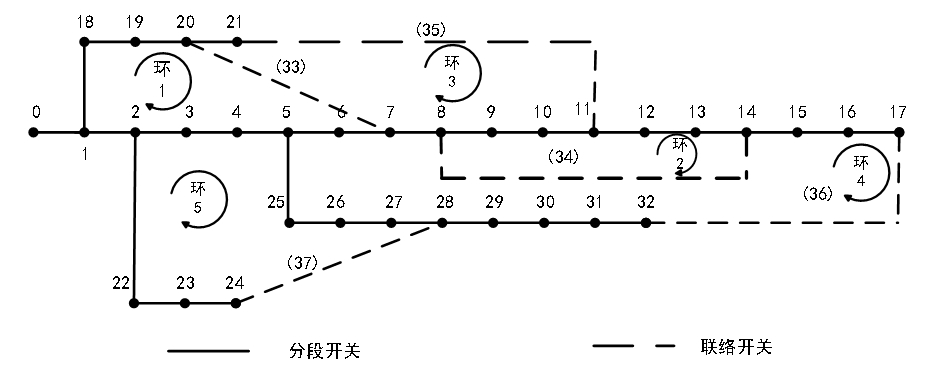
电网基础参数:定义配电网总节点数n=33、联络开关数LL=5、基准功率Sb=10MW、基准电压Vb=12.66kV,并计算基准阻抗Zb=Vb²/Sb(用于后续标幺化计算)。拓扑关联矩阵:通过H矩阵定义5个回路与联络开关的关联关系,BranchM矩阵存储37条支路的参数(支路编号、首末节点、阻抗),NodeM矩阵存储33个节点的负荷功率(有功+无功)。分布式电源配置:在节点16、24接入光伏电源(P
基于遗传算法优化的非线性自抗扰控制永磁同步电机仿真,还有神经网络等等各种方法优化。在电机控制领域,永磁同步电机(PMSM)以其高效、节能等优点被广泛应用。然而,传统的控制策略在面对复杂工况时往往难以满足高精度控制的需求。近年来,结合遗传算法、神经网络等智能算法对PMSM控制进行优化成为热门研究方向,今天咱就唠唠基于遗传算法优化的非线性自抗扰控制永磁同步电机仿真。
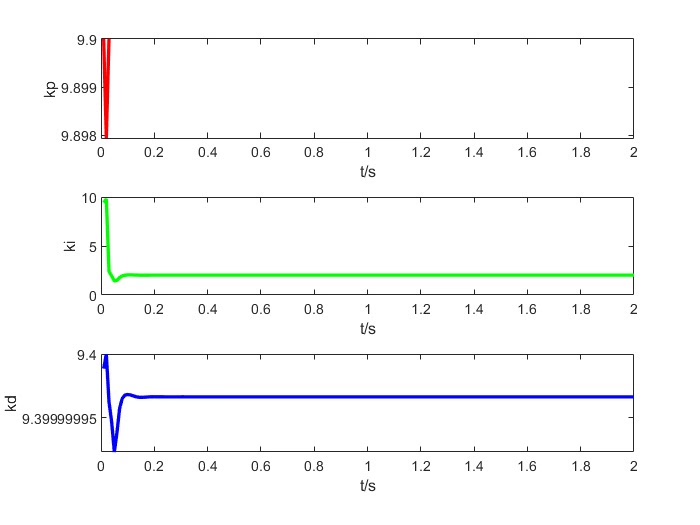
基于粒子群(pso)优化的bp神经网络PID控制…在控制领域,我们一直在追求更精准、更智能的控制策略。基于粒子群(PSO)优化的BP神经网络PID控制,就是这样一种融合多种技术优势的创新方案,它正逐渐改变着传统控制的格局。