
写文章




- @2503_90412473
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
STM32 低功耗设计入门:搞懂 Sleep / Stop / Standby 和功耗思维
以前做电赛、嵌入式比赛的时候,我几乎从来没关心过“功耗”两个字:板子插着 USB,一直亮着灯、串口疯狂打印,很爽。但只要你想做一个、能长期跑在现场的设备,低功耗就是避不开的坑。这篇文章就从零开始,带你把 STM32 的低功耗模式和整体思路捋清楚。
PID 详解
PID控制器是工业控制和嵌入式领域的核心算法,因其原理简单、通用性强、实现成本低而被广泛应用。它通过比例(P)、积分(I)、微分(D)三个环节协同工作:P快速响应误差,I消除稳态误差,D预测变化趋势抑制振荡。参数调整时需平衡响应速度与稳定性,先调P,再调I,最后补D。工程实现有位置式(直接输出控制量)和增量式(计算控制量增量)两种方式。掌握PID各环节的作用本质(P决定速度、I确保精度、D维持稳定
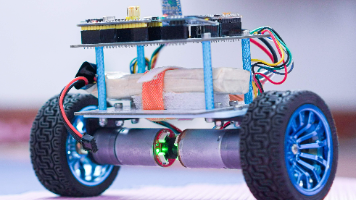
基于 STM32 的双轮自平衡小车——从原理到实践
摘要:双轮自平衡小车是基于倒立摆原理的智能控制系统,采用STM32作为主控芯片,配合MPU6050姿态传感器和电机驱动模块实现车身平衡。系统通过三环PID控制(角度环、速度环、位置环)实现直立平衡与运动控制,其中角度解算采用互补滤波算法处理陀螺仪和加速度计数据。硬件设计包含电机驱动、电源管理和编码器测速等关键模块,调试过程需循序渐进,先调姿态解算再整定PID参数。该系统展示了嵌入式控制在机电一体化
到底了