
写文章




- @2402_87741921
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
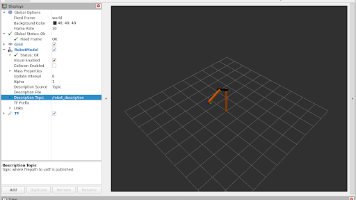
Linux:物理仿真与 Gazebo 世界
在 Rviz 里,你的机器人只是个“全息投影”,好看但不能打。:穿上“防弹衣”,让它能撞到东西,而不是穿墙而过。:告诉电脑它有多重 (Mass) 以及重心在哪。
机器人的“天眼” —— Rviz2
你可能以为它是像“王者荣耀”那样的游戏界面。错!Turtlesim(昨天的乌龟) 是模拟器 (Simulator):它负责创造世界(画乌龟、算物理)。Rviz2是可视化工具 (Visualizer):它负责看到世界。比喻:如果机器人是病人,Rviz2 就是核磁共振 (MRI) 机器。它能看到机器人脑子里的血管(数据流)、骨骼(坐标系)和它眼中的世界(雷达点云)。机器人“想”什么,你在 Rviz2
ROS 2 的核武器 —— Launch 文件
既然你上一篇已经亲眼看到了rqt_graph里的连线,说明你对“节点通信”已经有感觉了。今天,我们要进入。回顾一下刚才的操作:为了实现“影分身”,你是不是开了 4 个窗口?开乌龟 (gui生乌龟 (spawn开模仿 (mimic长命令)开键盘 (key如果以后你要做一个真正的机器人,需要启动激光雷达、摄像头、底盘驱动、导航算法……难道要开 20 个窗口,手敲 20 行命令吗?😱肯定不行!所以今天
到底了