- @2301_78912049
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
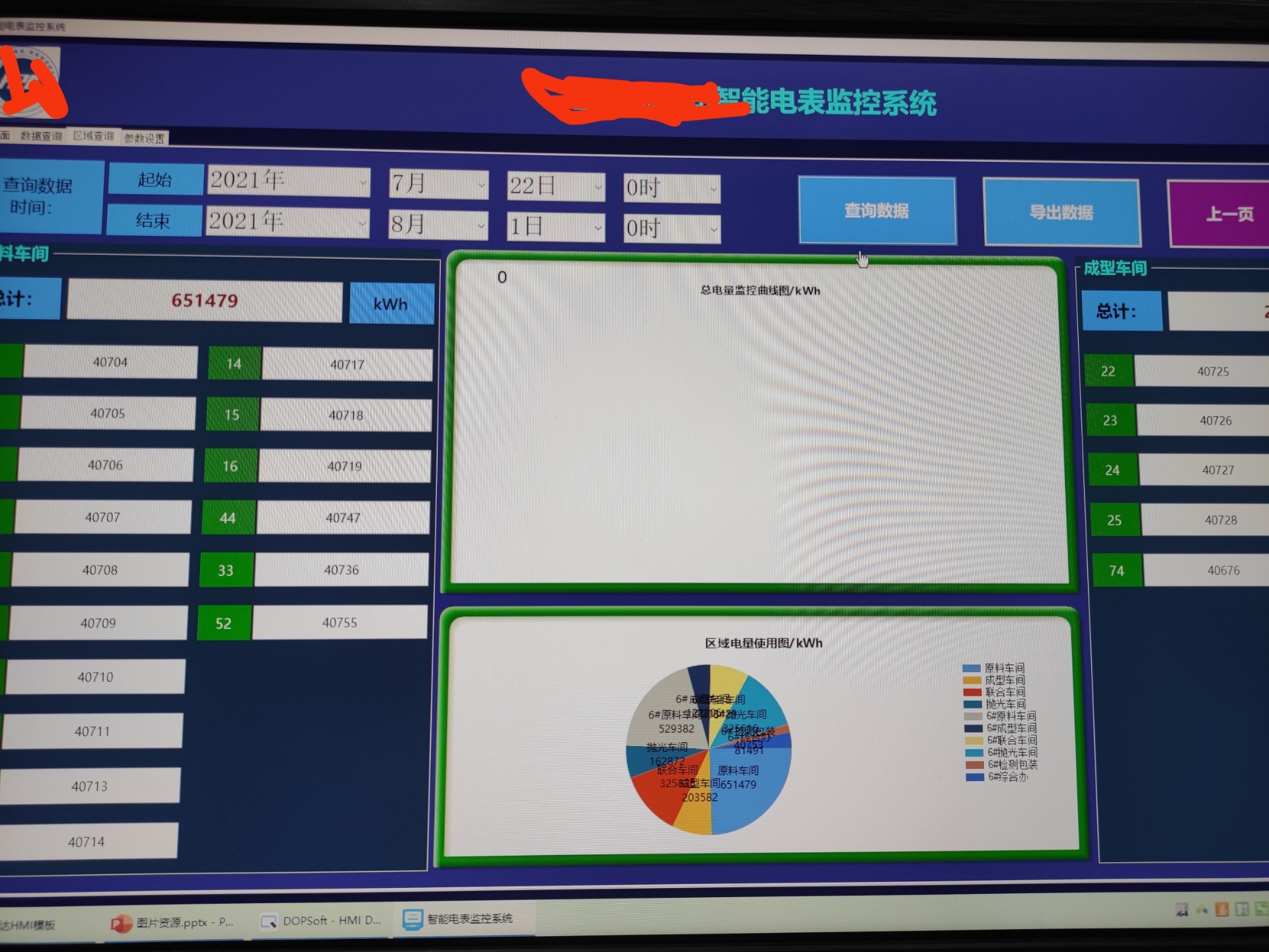
智能电表远程抄表系统是一个基于.NET Framework 4.8开发的Windows桌面应用程序,专为工业企业电表监控和管理设计。该系统通过现代化的用户界面提供了电表数据采集、实时监控、历史查询和参数配置等核心功能,帮助企业实现电能的智能化管理和分析。
音乐推荐系统系统算法:基于用户的协同过滤推荐算法编程语言:python数据库:sqlite框架:MVCweb应用框架:Django解压就可以运行(自己需要有调试项目环境的能力),需要软件python和pycharm或者Anaconda项目有配套的文档。
本文档旨在详细说明一个基于 C# 开发的客户端应用程序的功能架构与核心工作流程。该客户端支持连接本地或远程 OPC DA 服务器,浏览服务器中的数据节点(Tags),实时读取数据项的值、品质和时间戳,并支持向指定节点写入数据。程序基于实现,适用于工业自动化领域中与各类 OPC 服务器(如 Kepware、Matrikon、Siemens SIMATIC NET 等)进行通信的场景。
搞工控的都懂,有些延迟是物理特性决定的,代码再牛逼也干不过网卡。C#上位机读写PLC案例,TCP通信,通讯部分封装成类,没有加密,都是源码,注释齐全,纯源码,此版本支持汇川全系列PLC的ModebusTCP通讯的读写操作。最后说下C005型号的特殊处理:需要先发个特定握手报文,这个在基类里用虚方法实现,具体型号继承重写就行。这算法能把多个分散的写入请求合并成最少的Modbus报文,实测在修改50个
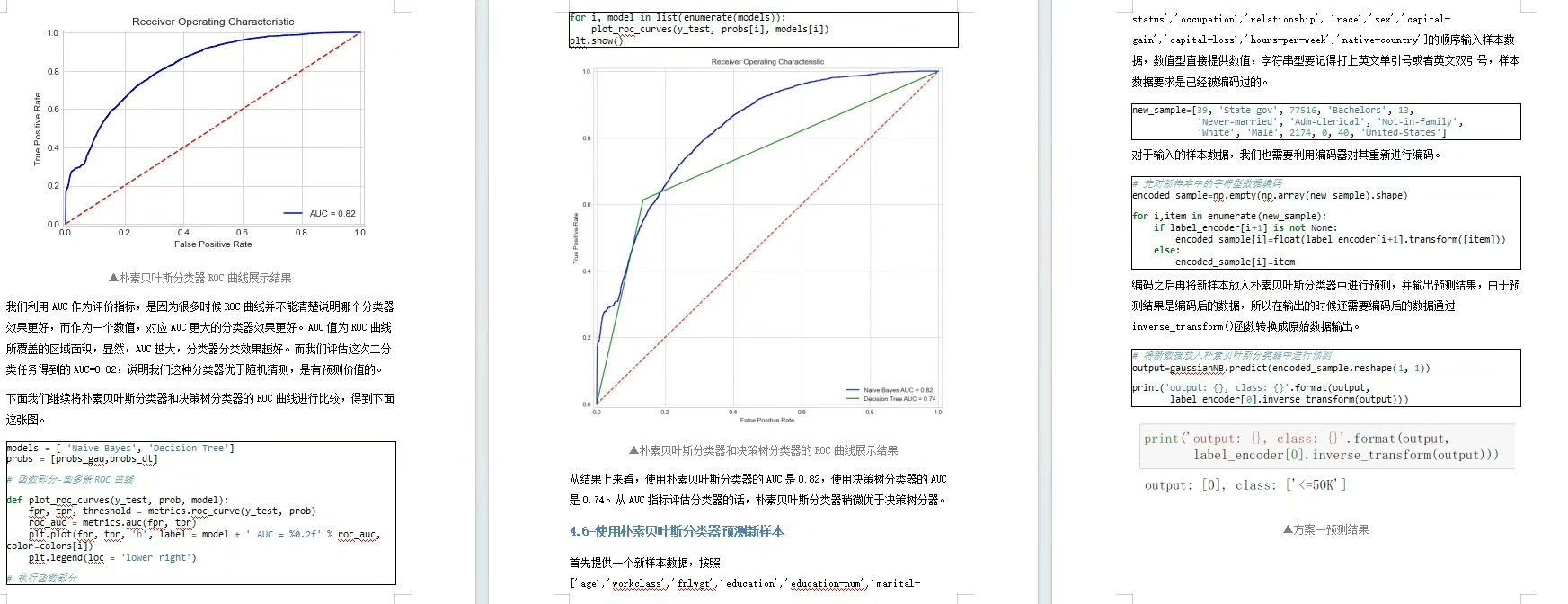
数据挖掘项目python--基于朴素贝叶斯分类算法的收入预测项目流程:数据分析训练朴素贝叶斯分类器两个方案实现(pycharmjupyter)包含内容:数据集代码(pycharm+jupyter)文档在数据挖掘领域,预测任务是非常常见且具有实际价值的。今天咱们就来聊聊基于朴素贝叶斯分类算法的收入预测项目,并且会用到 Python 来实现,同时展示在 Pycharm 和 Jupyter 这两个常用环
Python环境下一种基于1D-CNN的齿轮故障诊断及TSNE可视化方法算法运行环境为Python,深度学习模块为tensorflow和keras具体模块如下在机械工程领域,齿轮故障诊断是确保设备稳定运行的关键环节。借助 Python 强大的生态系统,我们可以利用 1D - CNN(一维卷积神经网络)来高效地实现这一任务,并通过 TSNE(t - 分布式随机邻域嵌入)进行数据的可视化分析。本文就带
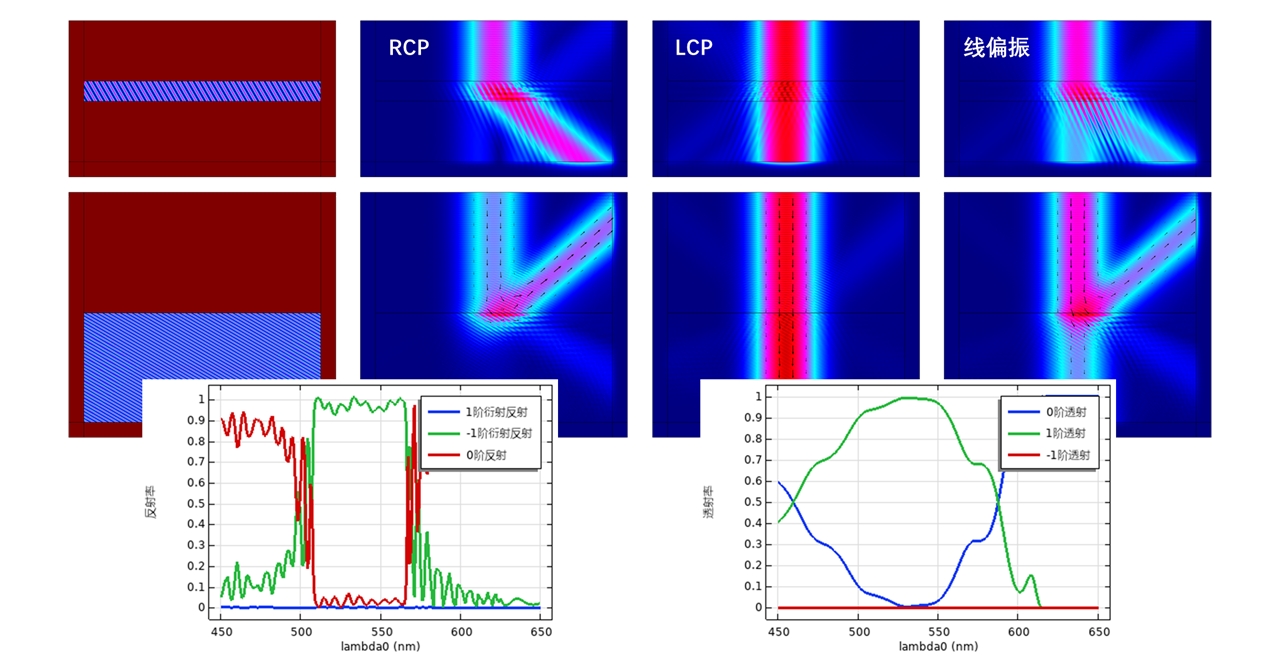
先瞅瞅胆甾相液晶的周期性结构,螺旋轴方向上的周期长度P是关键参数。假设入射光波长是λ,当满足布拉格条件2P·sinθ = mλ时(θ是入射角,m是衍射级次),衍射效率直接拉满。实际测试时会发现,当delta_n超过0.2后,效率提升开始边际递减,这就是液晶材料选择的平衡点。液晶光栅PVG(偏振体积光栅)这玩意儿在AR眼镜和全息显示里特别火,尤其胆甾相液晶那个螺旋结构,能把光的偏振玩出花来。实际跑仿
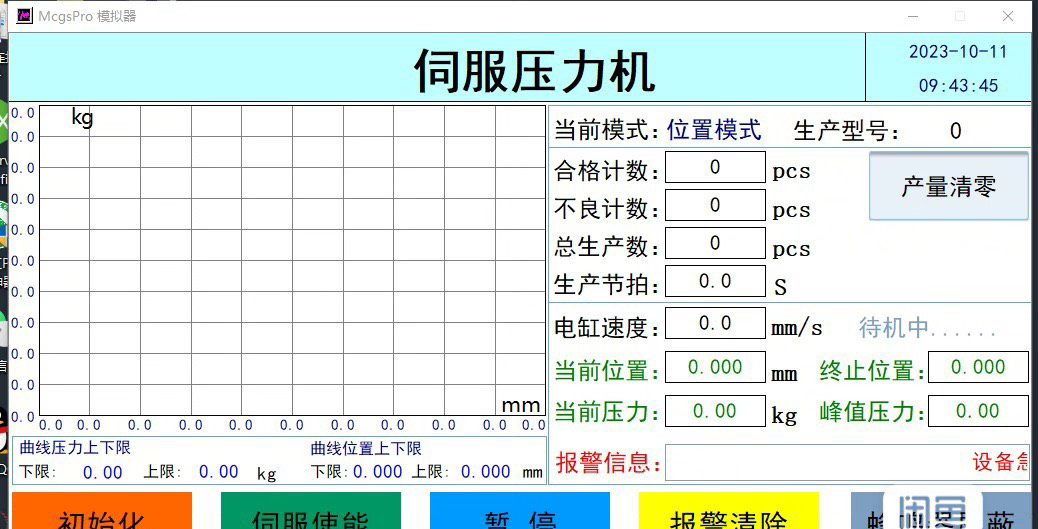
伺服压力机的控制系统开发,最有趣的部分莫过于触摸屏和PLC的默契配合。最近在调试一套基于三菱FX5S的伺服压装系统,用上了昆仑通态MCGS触摸屏的几个实用功能,顺手把玩了一把XY曲线动态追踪,记录些实战心得。这套系统调试完最大的感触是:好的注释比代码本身更重要。特别是伺服压力控制中的平滑过渡算法,几个月后回头看注释还能立刻理解当时的处理逻辑,这才是工程代码该有的样子。mcgs触摸屏:XY曲线,趋势
WPF MES 产线执行系统是基于 .NET Framework 4.5 开发的工业级制造执行系统,采用 WPF 技术构建可视化界面,集成 AGV 调度、立库管理、订单执行、设备通信等核心功能,实现产线全流程自动化管控。系统通过 Socket 通信与 AGV、PLC、立库等设备交互,依托 SQL Server 数据库实现数据持久化,支持手动、半自动、全自动三种操作模式,适用于多工位协同的离散制造场

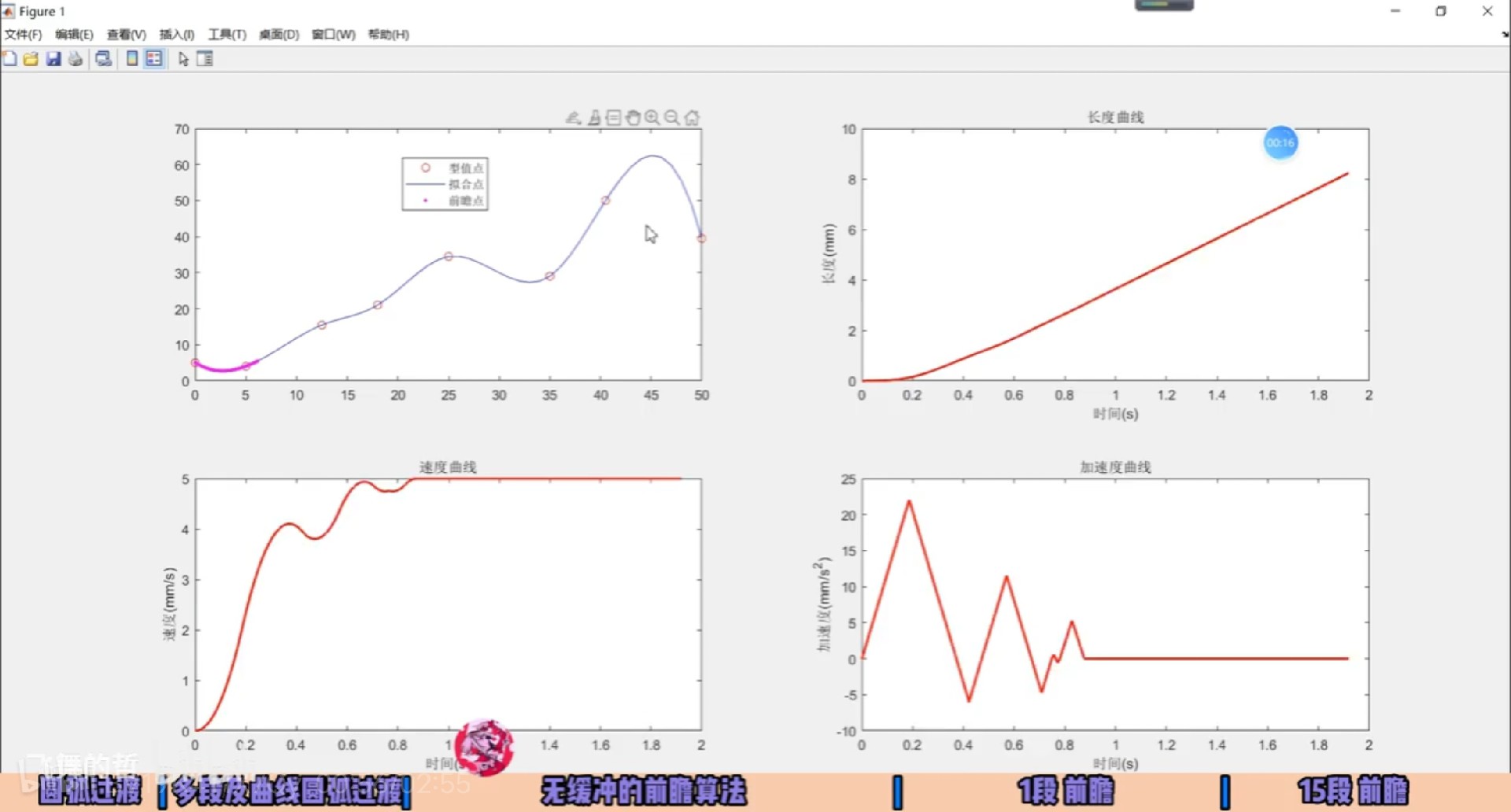
根据曲率及最大进给速度、末端各轴最大加速度和加加速度获得各段曲线的最大速度约束条件,为了确定机器人最终速度,采用双向扫描的前瞻策略对各段衔接点速度进行调整,最后采用S型曲线规划速度曲线,采用反向插值算法,得到机器人末端各轴实时位置,以此完成前瞻速度规划,获得约束条件下加工时间最短的机器人加工轨迹。机器人的前瞻控制算法,将机器人的行走轨迹进行拟合并将其离散成小段,根据弓高误差约束,采用直线圆弧的平滑