NJU-SME 人工智能--搜索
搜索是AI中的核心问题,指在状态空间通过合法动作从起始状态找到目标状态的过程。文章介绍了搜索问题的通用框架(状态空间、动作集、转移函数等),并以吸尘器和迷宫为例说明应用。重点分析了三种无信息搜索算法(BFS、DFS、UCS)和两种有信息搜索算法(贪心算法、A*),比较了它们的完备性、最优性和复杂度。其中A*算法结合路径代价和启发式函数,在满足可容许性和一致性条件下能保证最优解。最后指出实际应用中需
搜索:在一个状态空间里,从起始状态开始,通过一系列合法动作找到目标状态的过程。
许多 AI 中的问题都可以理解为“搜索问题”
• 下棋:在棋局空间搜索最佳落子
• 路径规划:在地图空间搜索最短路
• 机器学习中的分类问题:在函数空间搜索最优分类器(函数)
• 运筹学中的函数最小化/最大化问题:在参数空间里找最小点/最大点(单纯形法 顶点的移动)
• 深度学习:在参数空间搜索神经网络的最优权重
区别在于:空间的结构不同 搜索方法不同
1. 状态空间图
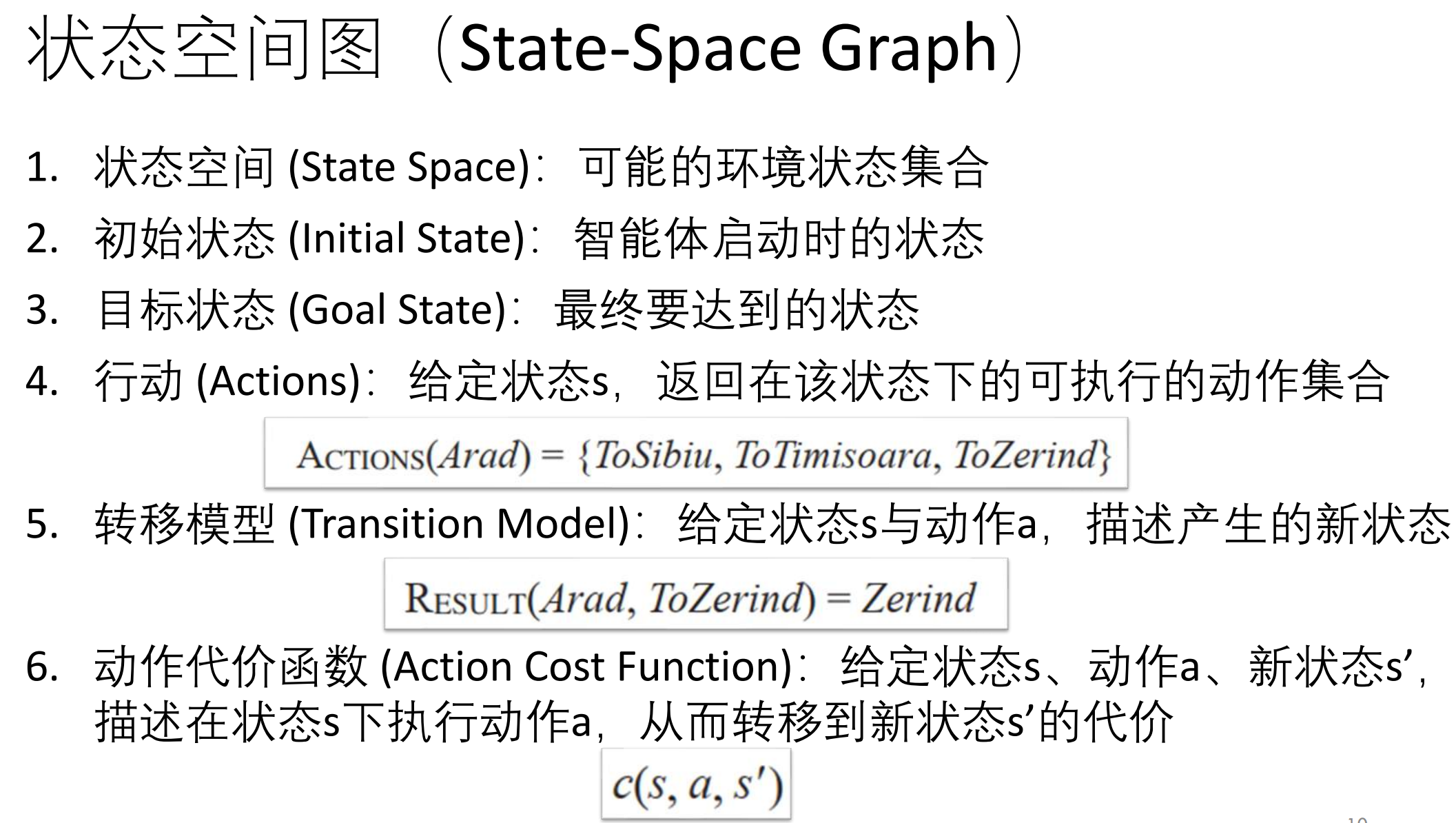

Ex.1 两个房间吸尘器
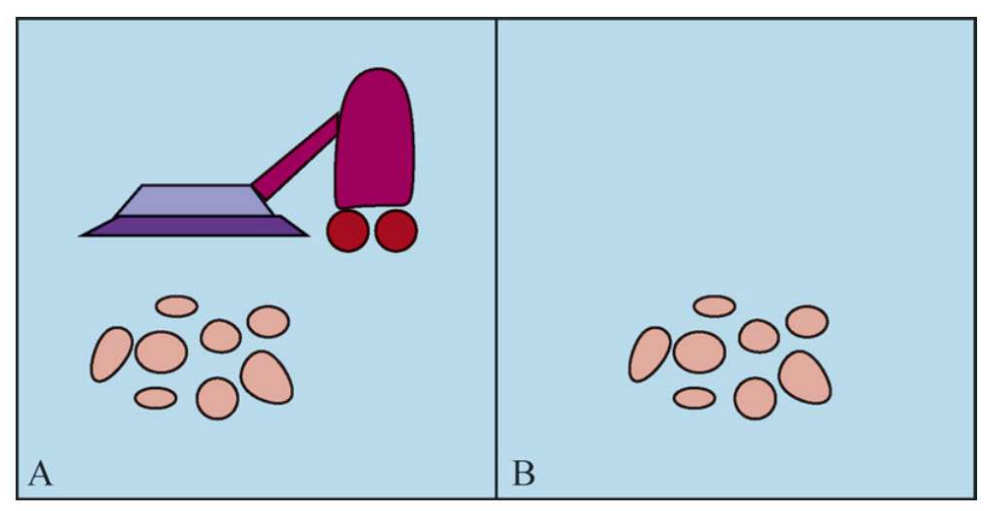
一个只有两个方格的真空吸尘器世界。每个位置可以是干净的,也可以是脏的,智能体可以向左移动L 或向右移动R,可以清理S 它所占据的方格。不同版本的真空吸尘器世界允许不同的规则,例如智能体可以感知什么,它的动作是否总是成功等.
状态三元组(Cleaner,A,B)表示:吸尘器现在在A还是B / A是否干净 Yes or No / B是否干净;
1. 状态空间 |S| 8个元素; n个房子就 n*2^n; 2. 初始状态为S中任意情况
3. 目标状态 房间都干净(全为Yes)吸尘器任意房间
4. 动作集合有(Left, Right, Suck) 往左移动 往右移动 和清洁
5. 状态转移 比如 清洗把A变干净 T((A,N,N),Suck) = (A,Y,N) 右移到B: T((A,Y,N),Right) = (B,Y,N)
6. 动作代价函数Cost 行动的消耗 比如 C((A,N,N),Suck) 吸尘A房间的消耗资源之类
Ex.2 迷宫
1. 状态空间:在地图上的各个位置
2. 初始状态:迷宫入口位置
3. 目标状态:迷宫出口位置
4. 动作集合:按规则移动 比如上下左右之类
5. 状态转移:状态+动作 之后的位置
6. 动作代价函数Cost:移动损耗;比如我目标是最小化步数 移动一次就损耗1步
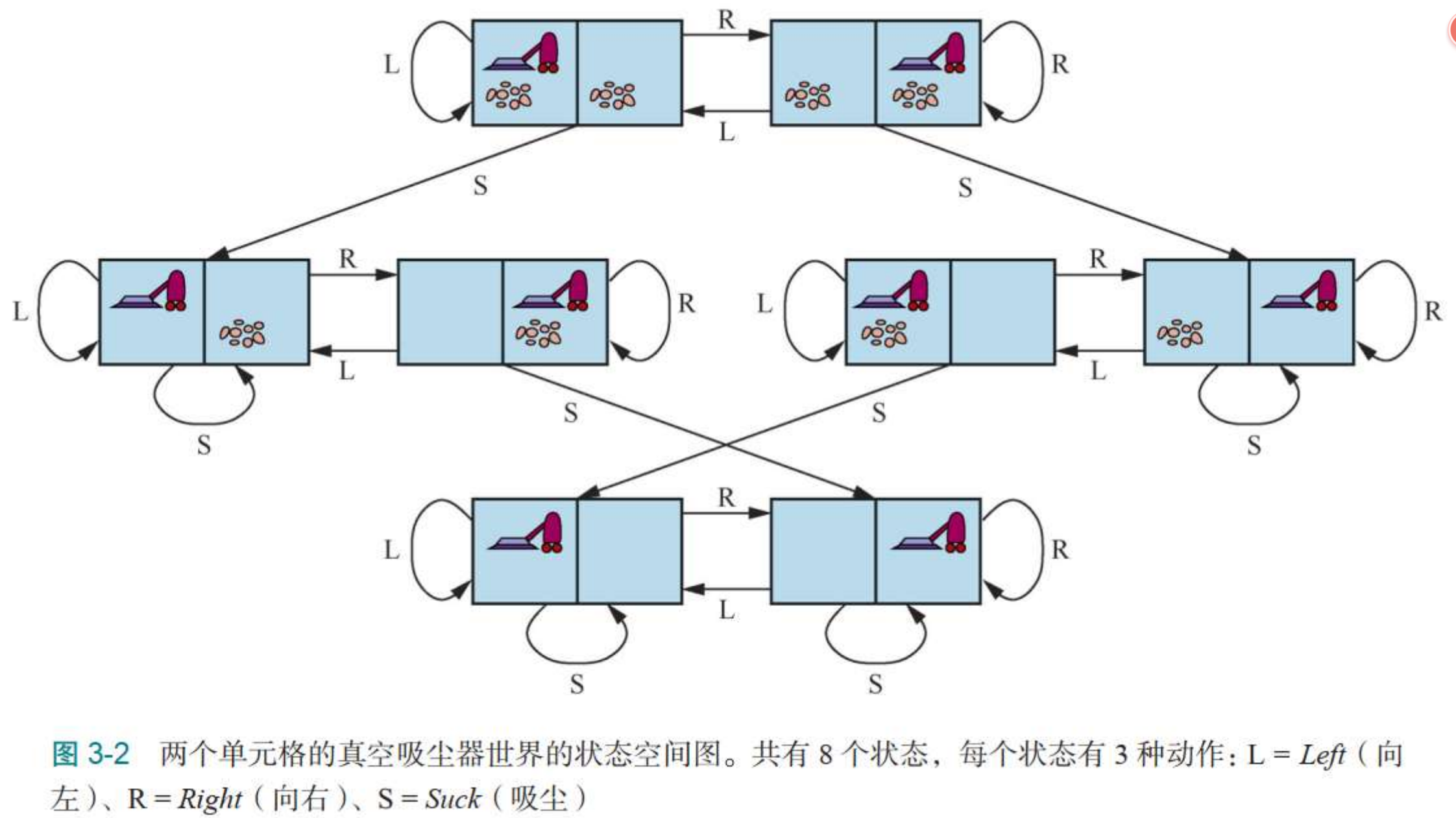
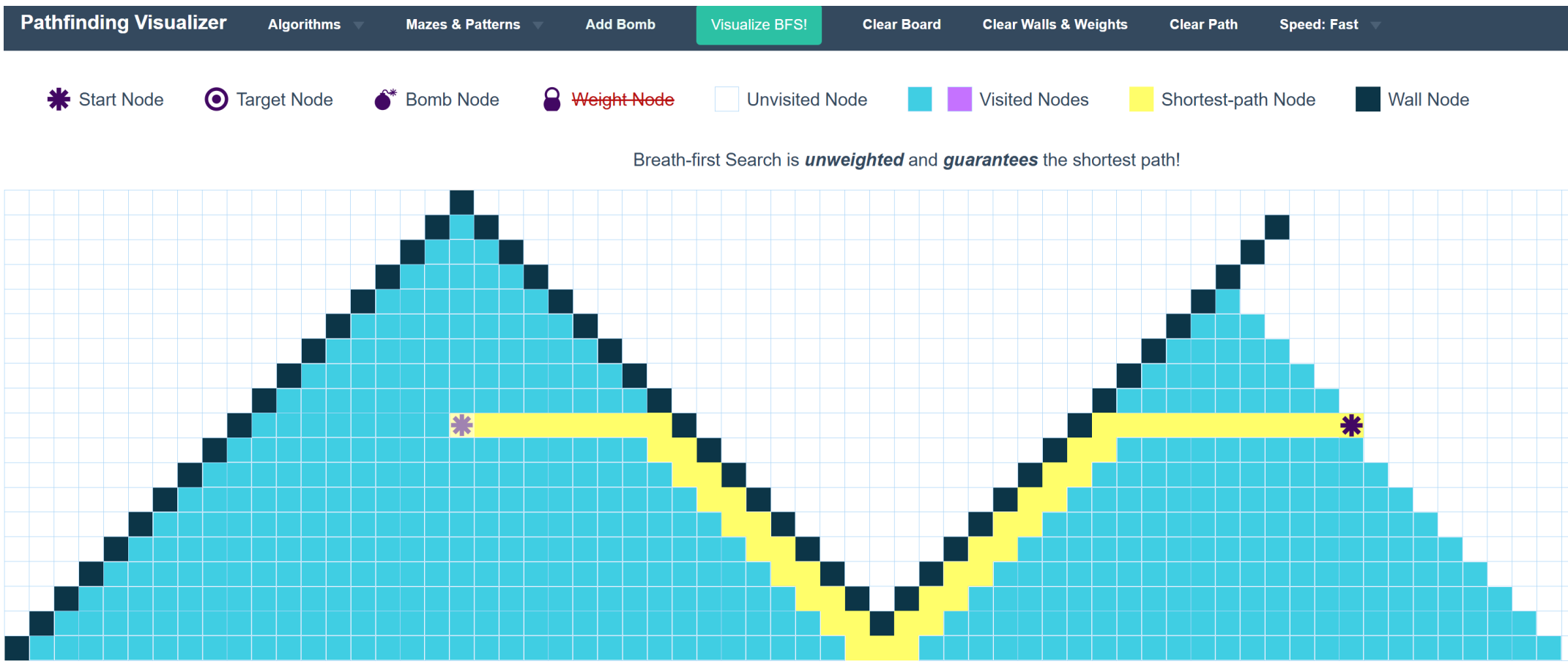
2. 搜索算法
https://clementmihailescu.github.io/Pathfinding-Visualizer/# 可视化迷宫搜索
设置起始点 目标点 地图障碍;选择搜索算法 可视化进行搜索过程。
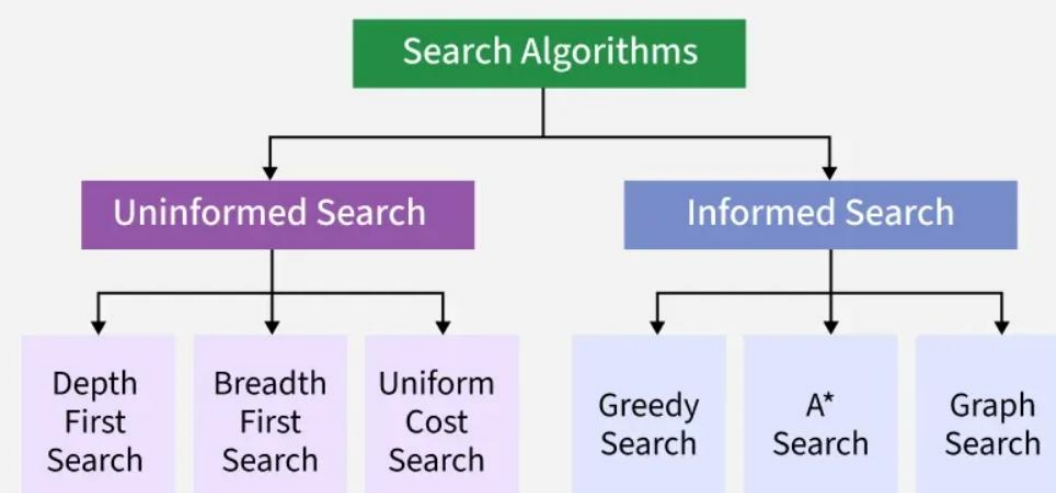
无信息搜索/盲目搜索(Uninformed Search)
• 智能体对状态空间与目标状态的关系不知情
• 穷举搜索(Brute force) • BFS, DFS, UCS
有信息搜索/知情搜索(Informed Search)
• 使用与目标状态有关的特定领域信息 • Greedy, A*
2.1 宽度/广度优先搜索(Breadth-First Search, BFS)
先扩展根节点,然后1. 扩展根节点的所有后继节点
2. 检查是否为目标节点,3. 再扩展后继节点的后继并检查,以此类推。

Ex.1 迷宫问题
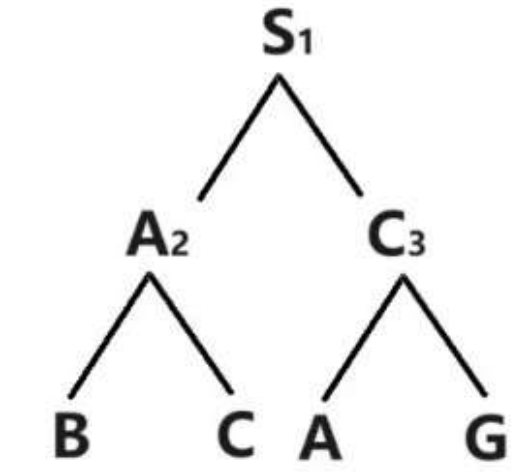
先将图转换为 图论形式(顶点和边表示)
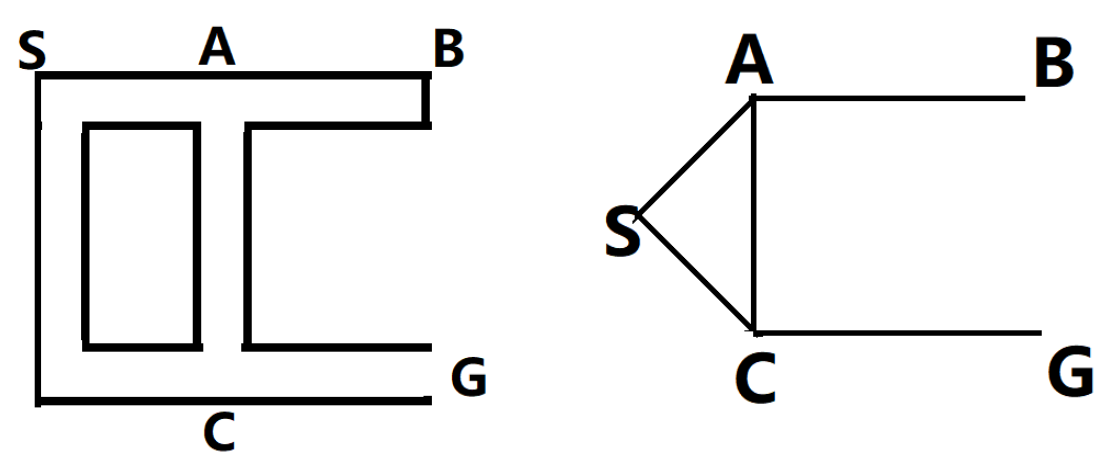
每次站在一个节点 做所有动作 看能转换到哪些状态
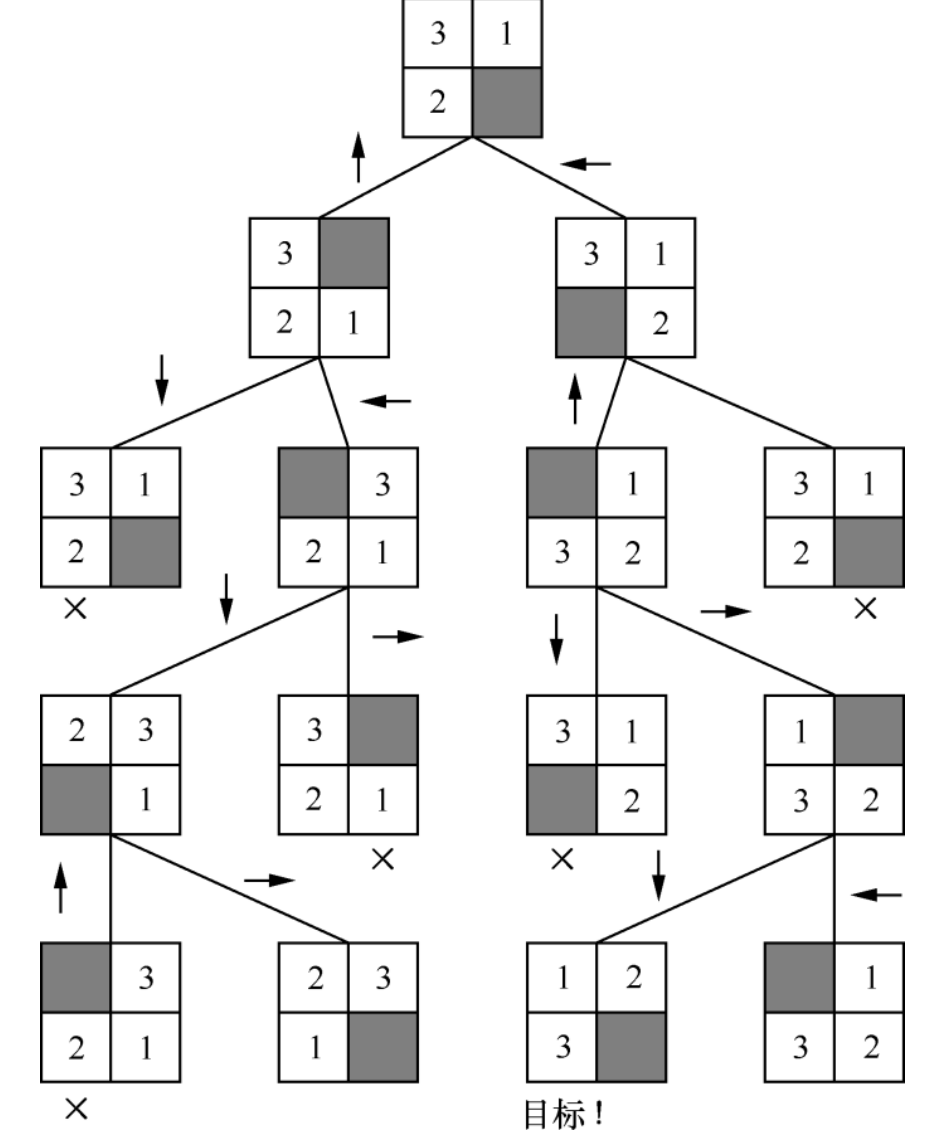
Ex.2 数字华容道
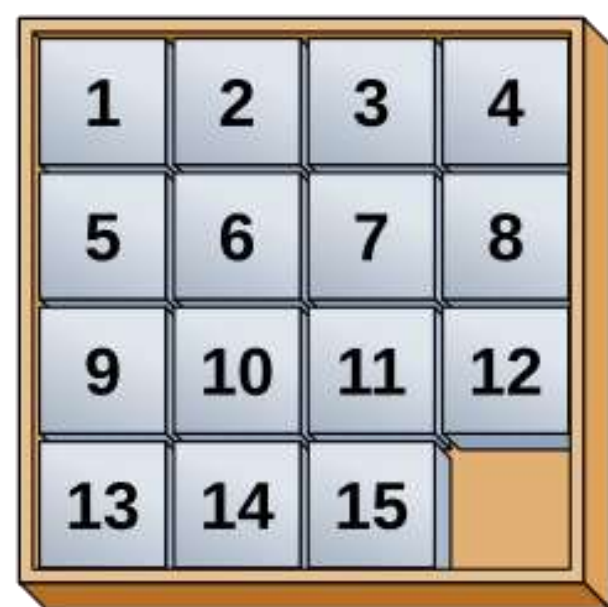
动作空间 围绕中间的空 和上下左右位置交换:比如上面 左 <- 就代表把15移动到空格上
把矩阵展平成向量 T( (312* ), 上) = (3*21)
搜索树中 与之前状态重复则剪枝
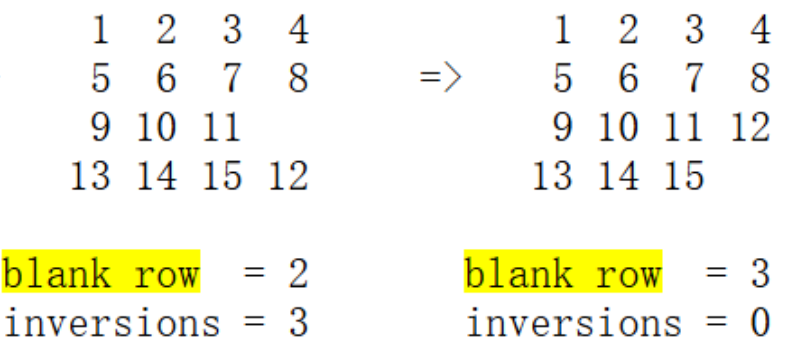
n个格子状态空间总数:n! / 2。 因为无论怎么移动 展开序列的逆序数奇偶性不变
比如 3*3 九个格子 八数码问题 则有 9! / 2 个状态。

比如这个四阶的 做上下调换 3->0 逆序数奇偶变,(逆序数+“*”所在行)奇偶不变
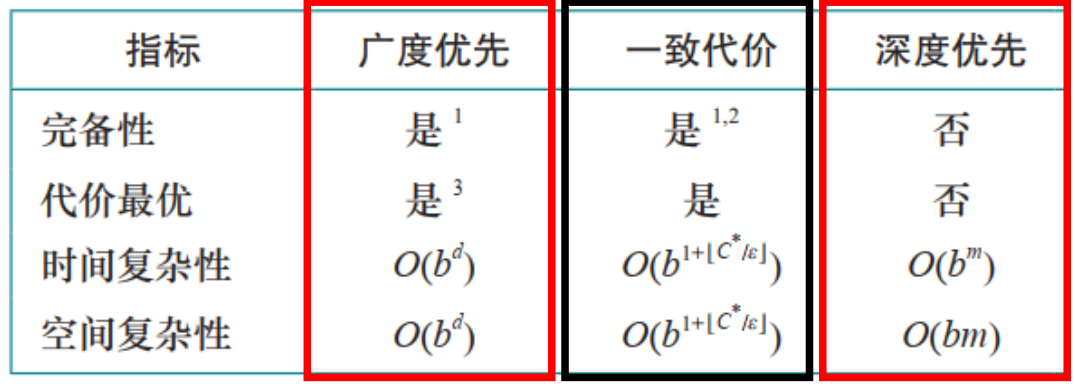
• 完备性:有限分支的情况下,BFS是完备的
• 最优性:BFS总能找到一个动作数量最少的解(步数更少的解都被pass了)
如果所有动作的代价相同,则BFS代价最优
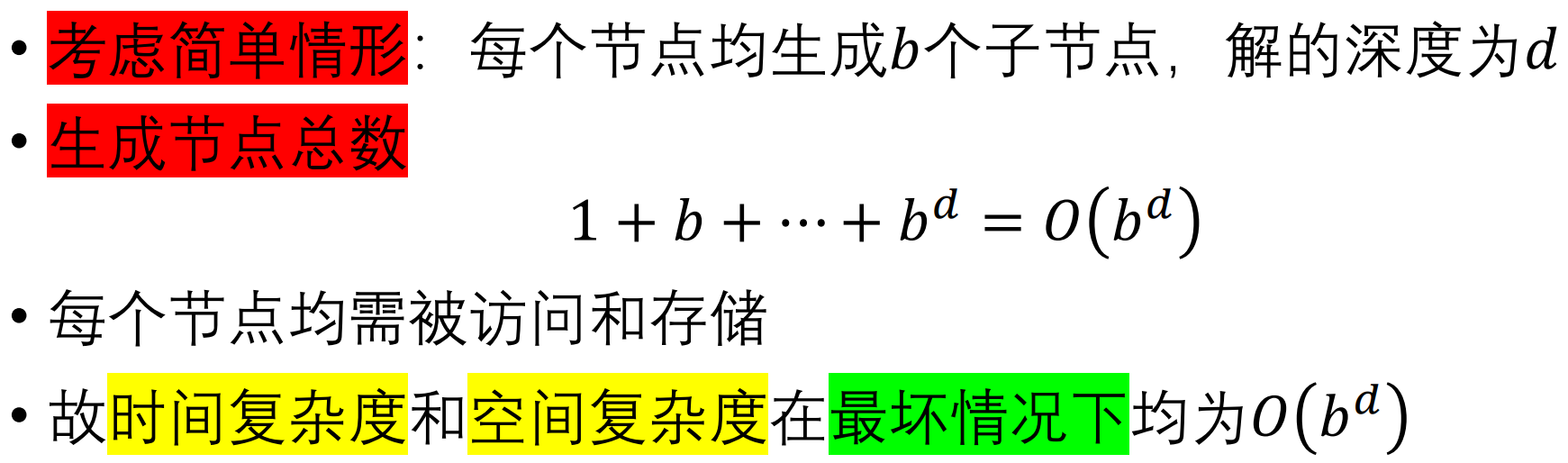
因为前面d项等比数列 b≥2 时 小于b^d; 所以求和小于 2*b^d 即O(b^d)
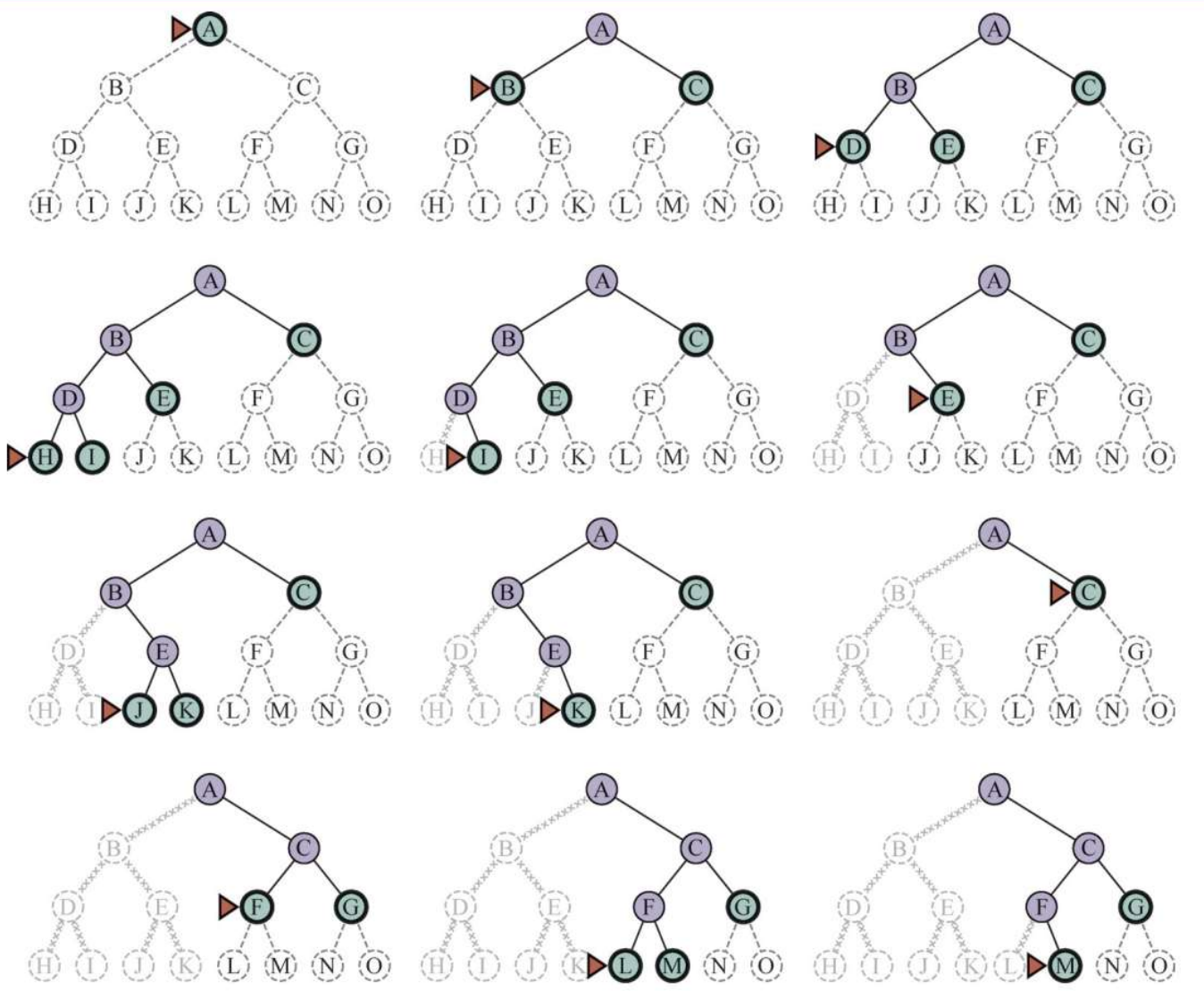
2.2 深度优先搜索(Depth-First Search, DFS)
• 总是优先扩展边界中最深的节点
• 搜索先直接到达搜索树的最深层,这里的节点不存在后继节点
• 然后,搜索将回退到下一个仍存在未扩展后继节点的最深的节点。
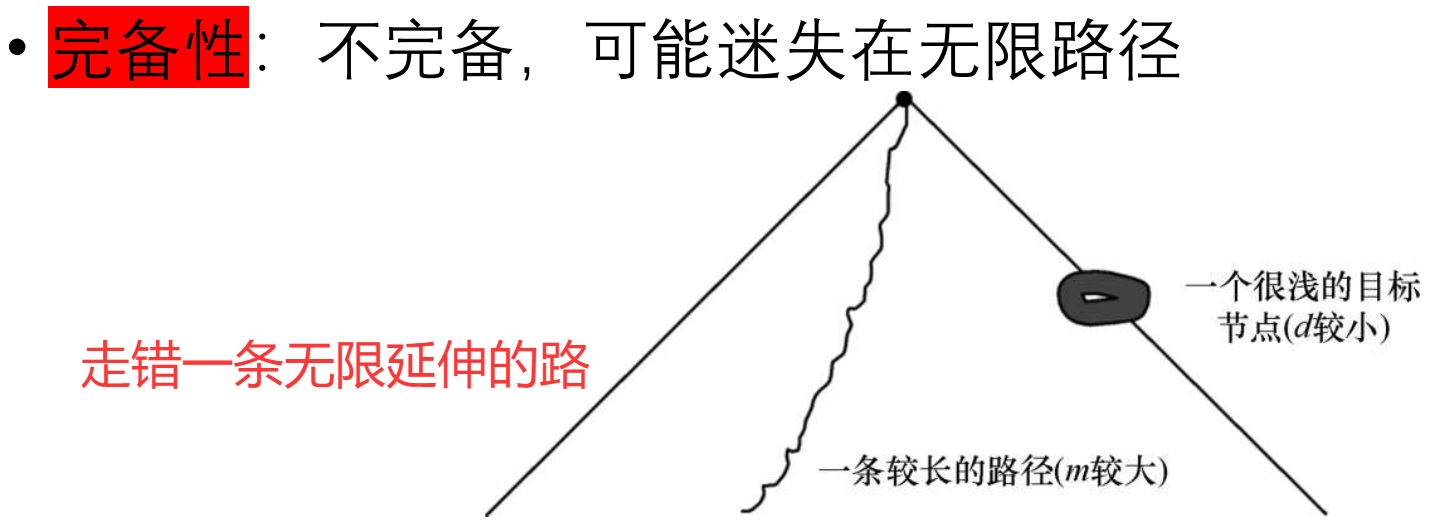
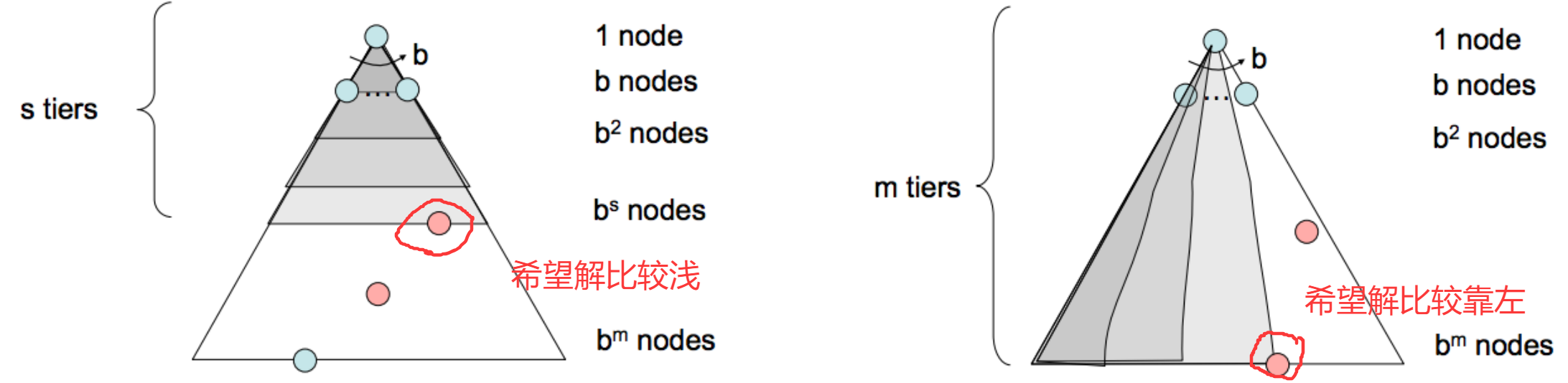
DFS优势 O(bm)的空间复杂度 ; 解比较深的dfs 比较浅的bfs
指数复杂度的问题,在未来计算机运算速度提升很多之后 解决问题规模的提升不显著

2.3 一致代价搜索(Uniform Cost Search, UCS)
类似Dijkstra思想,每次扩展 用距离起点最近 / 代价最小的点扩展
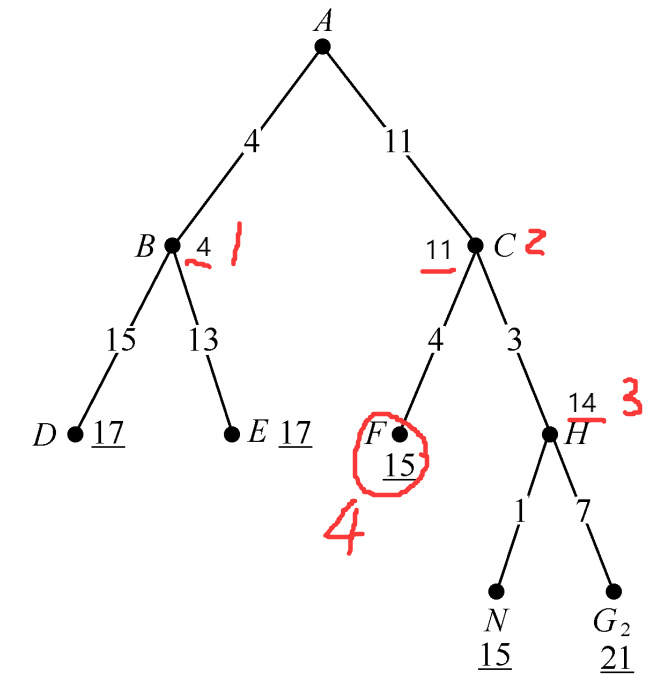
初始 A扩展出了B C;B代价最小扩展出D E;
C D E 中 C代价最小;扩展出 F H; D E F H 中 H代价最小 扩展出 N G;
D E F N G中 F代价最小,准备扩展 F。
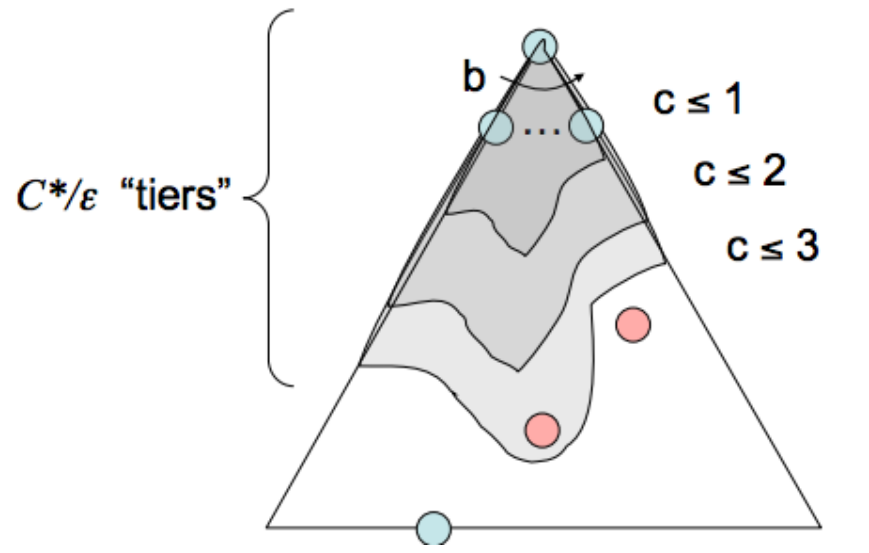
假设所有动作代价都是正数 达到的解则是代价最优的。
2.4 无信息与有信息 Informed Search
BFS/DFS/UCS: 最坏情况下均为指数级复杂度
盲目搜索:直到看到Goal才停止,途中对于Goal没有任何信息

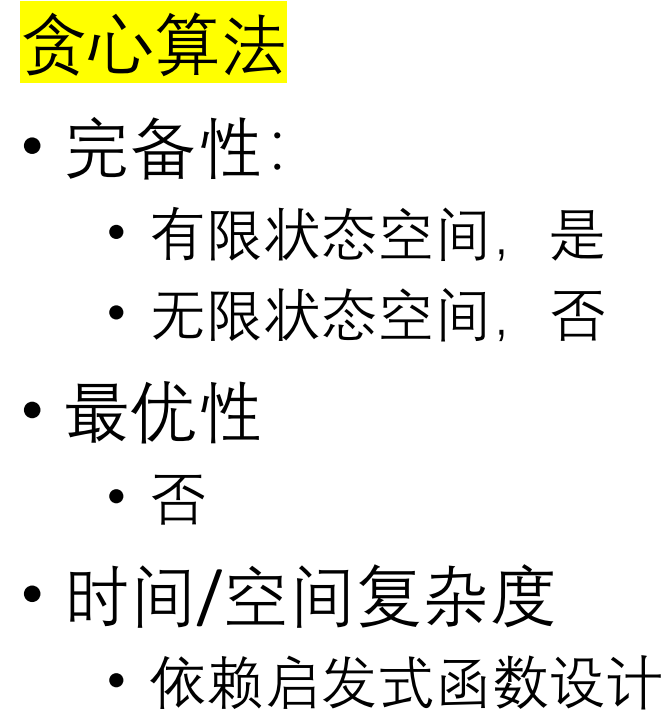
贪心算法(Greedy Best-First Search)
每次扩展Heuristic (ℎ(n)) 最小的点,即(可能)最接近Goal的点
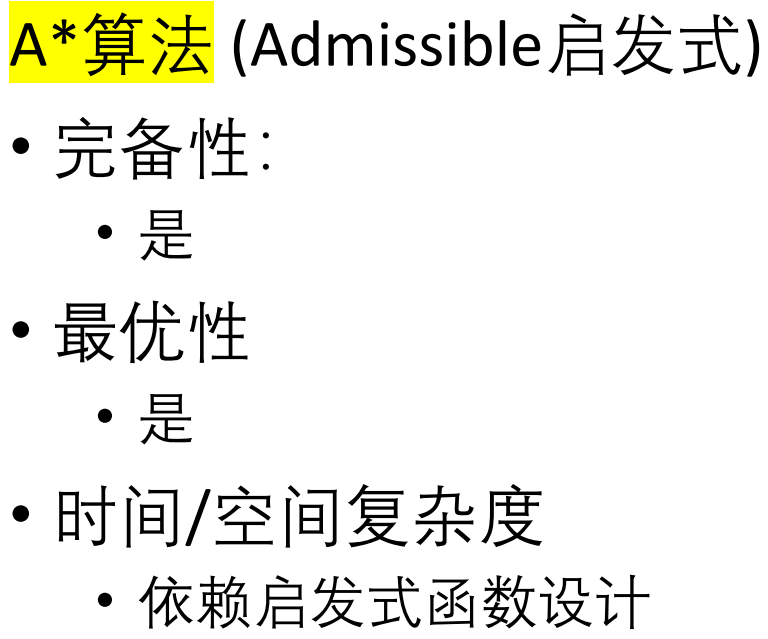
A* Search 结合UCS & Greedy

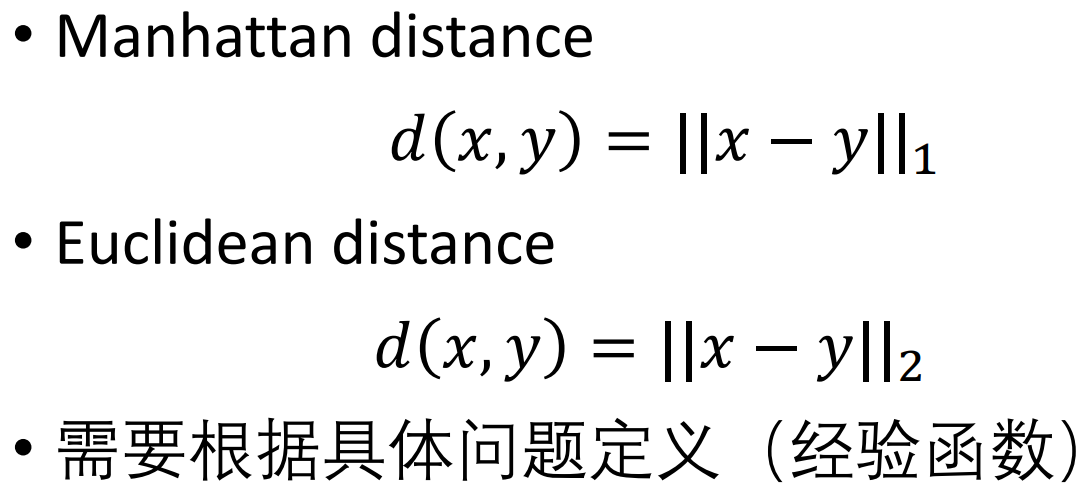
A*的启发式函数h
可容许Admissibility

![]()
![]()
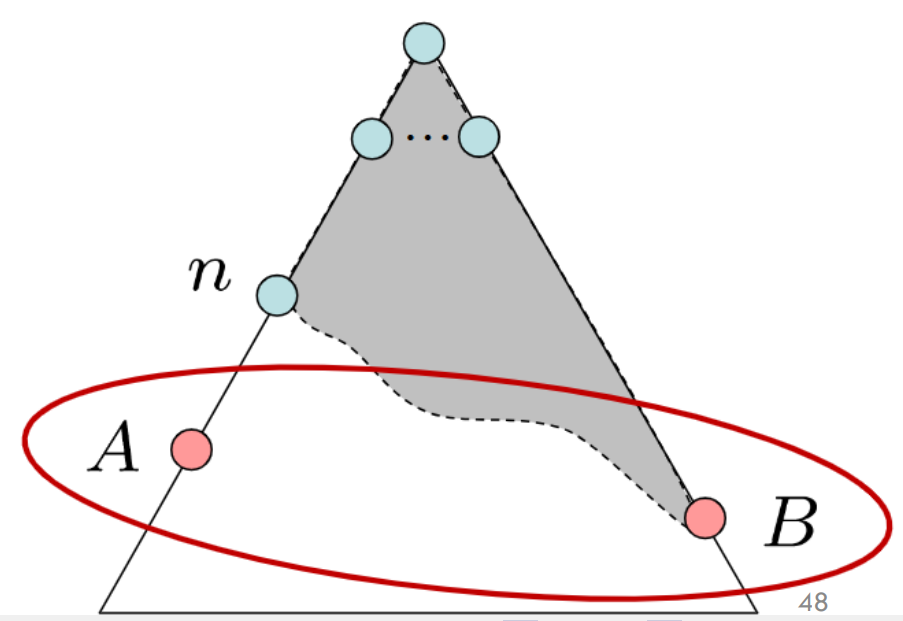
证明:设 A、B均为目标点 h(A) = h(B)=0 ;A是最优点 g(A)=c*<g(B)
因为 f = h + g 所以 f(A)<f(B) 所以保证搜索到 B之前就搜索到A了。
h(n) ≤ h*(n) g(n)+h*(n)=f(A)
f(n) = g(n) + h(n) ≤ f(A) 即![]()
一致性Consistency

一致性的A*下,一个节点第一次被扩展时,它的 g 就是最优路径代价。每个点只被扩展一次。
Dominance占优性
![]()
![]()
如8数码问题 使用h1(错位滑块数) h2(曼哈顿距离)
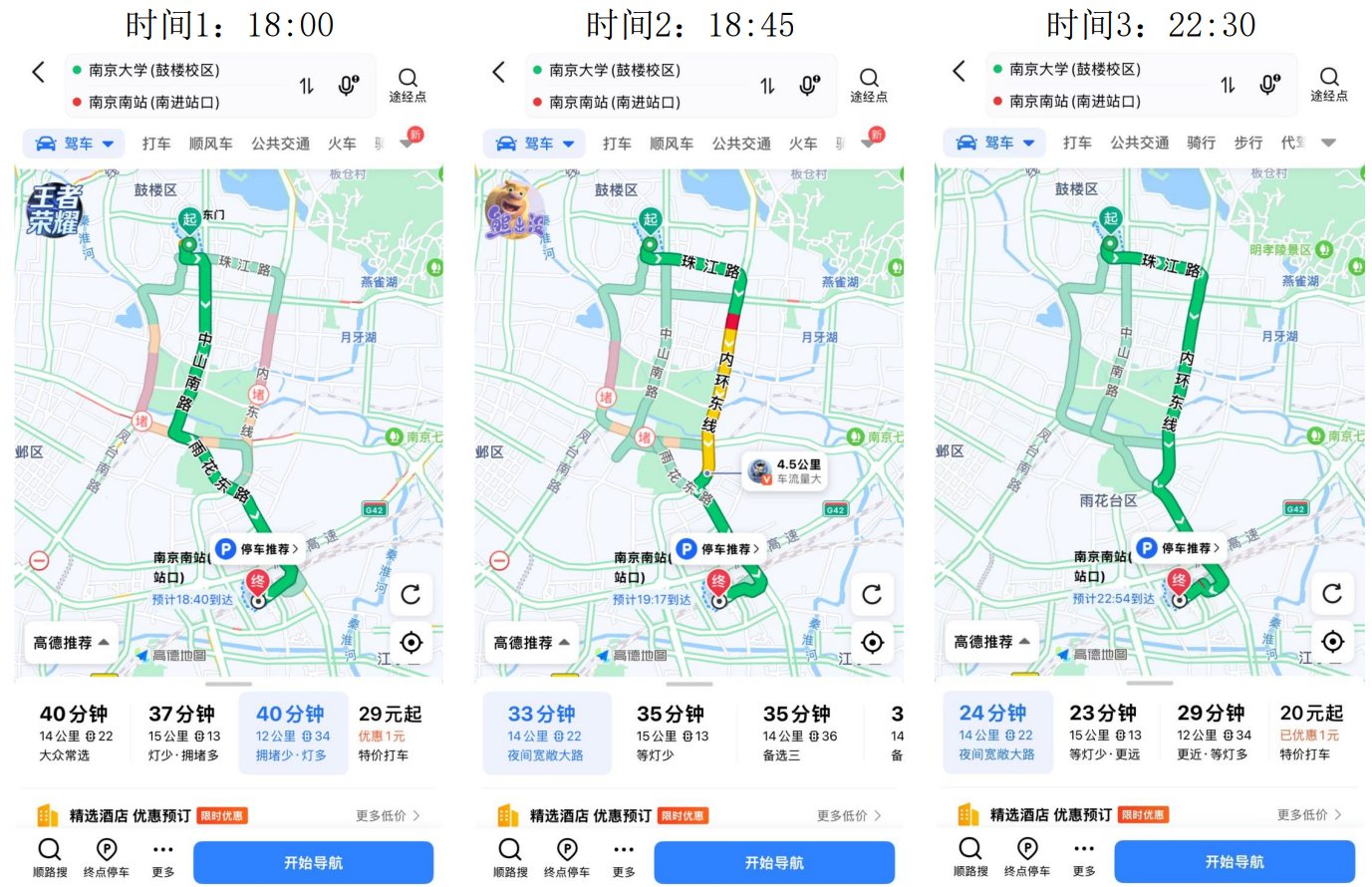
搜索应用到实际还需要进行 条件的完善和修正,如高德地图 在同一地点、不同时间段,车流量不同得到的路线规划与预期时间不同。

一座年轻的奋斗人之城,一个温馨的开发者之家。在这里,代码改变人生,开发创造未来!
更多推荐
 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)