
人机共生新突破!Open Jiuwen首发物理AI架构Jiuwen Symbiosis
近日,以“鸿蒙生态与AI前沿技术”为主题的华为开发者大会2026(HDC 2026)在广东东莞松山湖成功举办。在这场面向全球开发者的年度技术盛会上,OpenJiuwen 社区正式首发并开源了Jiuwen Symbiosis,作为一个专为高阶物理AI打造的共生架构,其补齐了传统大模型与数字Agent缺乏实体行动能力的短板,推动AI从虚拟数字世界全面走向真实物理场景。该架构面向具身智能、机器人Agent、视觉语言模型等前沿领域开放,为全球开发者提供了连接大模型与机器人领域的全新技术桥梁。
直击行业痛点,构建可落地的物理AI新架构
当下大模型已具备强大的推理、创作与逻辑运算能力,却深陷Moravec悖论困境:擅长复杂数理推演,却难以完成行走、抓取、避障等人类与生俱来的物理动作,沦为“智商出众却无实体”的“缸中之脑”。同时,传统虚拟仿真训练、端到端模型方案弊端凸显,存在跨环境泛化性弱、长程复合任务执行能力不足、故障难以定位、运行稳定性差等问题,严重制约了物理AI落地。
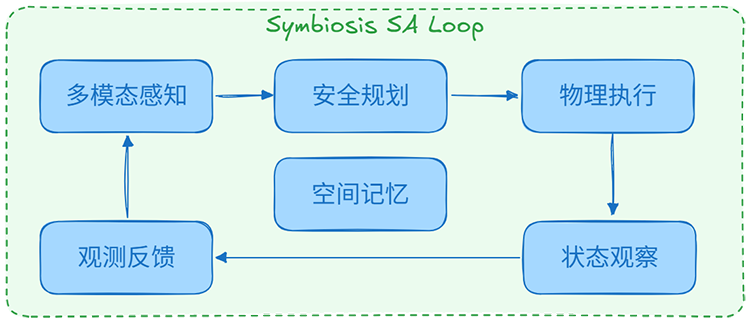
针对上述行业难题,Jiuwen Symbiosis通过打造态势感知环核心体系,搭建起了覆盖“感知、规划、执行、观测、反馈”的全闭环运行模式。架构将“多模态感知、安全规划、物理执行、状态观测、观测反馈、空间记忆”六大模块深度融合,把Agent内部运行状态显性化,彻底摆脱黑盒模式,让AI的思考、决策、执行过程可观察、可调试、可协作。
依托结构化世界状态输出,该架构可自主拆解复杂长程任务,实现零样本跨本体、跨环境自适应,大幅降低对专项训练数据的依赖,同时赋予物理设备自我总结、迭代进化的能力。从用户层面而言,使用者仅需通过自然语言下达指令,系统便可自主完成全流程操作,无需额外示教,大幅降低了物理AI的使用门槛。
生态深度适配,打造端云协同人机共生新范式
Jiuwen Symbiosis以“共生”为核心理念,打破传统人机单向控制模式,构建人机长期协作的全新关系。系统可自主理解任务目标、主动规划流程、适时请求协助,并持续从环境反馈中积累经验、自我优化,践行真正的人机共生理念。
在算力与硬件适配层面,该架构深度兼容华为昇腾、鲲鹏生态,采用轻量化端云协同设计。端侧部署轻量化视觉感知模型,依托昇腾310P NPU承载目标检测、多模态感知等高频实时任务;鲲鹏CPU负责任务编排、设备调度与控制逻辑,实现低延迟运行。
值得一提的是,Jiuwen Symbiosis还继承了OpenJiuwen在鲲鹏与昇腾生态上的优化成果。在某些场景中,其可承担大模型推理与复杂规划工作,合理拆分算力负载,规避传统GPU集群资源争抢的瓶颈。这种分层架构不仅提升了系统吞吐能力,也有效降低了端侧设备部署成本与功耗,可使Jiuwen Symbiosis广泛适配机械臂、四足机器人、边缘智能设备等硬件形态。
目前,Jiuwen Symbiosis已正式在Gitcode开源。OpenJiuwen社区表示,物理AI的发展离不开全行业协同共建,希望依托开源架构汇聚全球开发者力量,持续完善技术生态,加速推动感知、认知、行动一体化的物理AI时代全面到来。
「免责声明」:以上页面展示信息由第三方发布,目的在于传播更多信息,与本网站立场无关。我们不保证该信息(包括但不限于文字、数据及图表)全部或者部分内容的准确性、真实性、完整性、有效性、及时性、原创性等。相关信息并未经过本网站证实,不对您构成任何投资建议,据此操作,风险自担,以上网页呈现的图片均为自发上传,如发生图片侵权行为与我们无关,如有请直接微信联系g1002718958。
更多推荐


 2
2 0
0- 0



 已为社区贡献4410条内容
已为社区贡献4410条内容

所有评论(0)