人形机器人——热-痛觉模拟系统:自检测、动态阈值优化、心理触觉映射、情感反馈、模型和算法平台
本文系统探讨了热-痛觉模拟系统的损伤自检测技术及其算法进展,重点分析了动态阈值优化算法、心理触觉映射模型和神经关联模型等关键技术。研究显示,柔性电子伤害感受器和多模态传感器融合可有效模拟生物痛觉特性,而脉冲神经网络(SNN)和多模态融合算法能实现类脑痛觉决策。国内在光热电传感材料、多模态融合架构等方面取得突破,但面临灵敏度-特异性平衡、跨模态干扰等技术挑战。未来需结合神经形态芯片集成、个性化校准模
目录:
一、热-痛觉模拟系统损伤自检测及其算法进展
二、热-痛觉模拟系统损伤自检测算法框架和核心
三、动态阈值优化算法
四、心理触觉映射模型和算法
五、触觉信号与情感反馈的神经关联模型
六、心理触觉映射软件平台和计算工具及数据技术
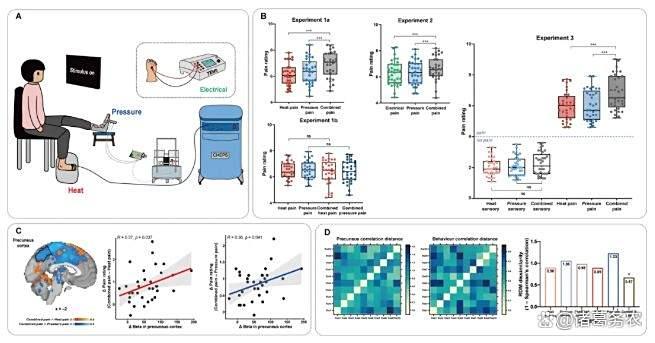
机器学习助力疼痛研究
一、热-痛觉模拟系统损伤自检测及其算法进展
热-痛觉模拟系统的损伤自检测技术是类脑感知与神经形态计算的前沿领域,其核心在于模拟生物伤害感受器(nociceptor)对有害刺激的动态响应机制,并实现对损伤程度的自主评估。
(一)损伤自检测机制创新
1. 柔性电子伤害感受器
基于柔性基底(如PEN)的ZnO/TiOx双层忆阻器可模拟生物痛觉的阈值突破、弛豫和异常痛觉(allodynia/hyperalgesia)等特性。例如,当施加≥0.9V/1ms电脉冲时,器件表现出类似神经的耐受突破行为;
延长刺激时间可复现痛觉敏感化过程,且损伤后仍保留弛豫记忆(>10ms)。此类器件成本低、可弯曲,适用于机器人电子皮肤。
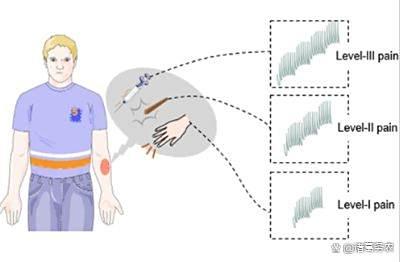
2. 多级痛觉分类器件
某团队通过调控氮化硅厚度(100-200nm)实现隧穿模式分级:100-160nm厚度支持两级痛觉感知(如轻微/剧烈疼痛);180-200nm厚度支持三级痛觉分类,可区分伤害性刺激的强度等级。光照或电脉冲均可触发模式跳变,实现伤害等级自主判别。
3. 多模态传感器融合
新型专利传感器整合压力、温度、损伤检测单元与人工突触,可同步感知机械损伤(如压力超限)和温度损伤(如>50℃热痛),并模拟“损伤预警-规避-伤口保护-自修复”全流程。
(二)核心算法进展
1. 实时神经元活动解析算法
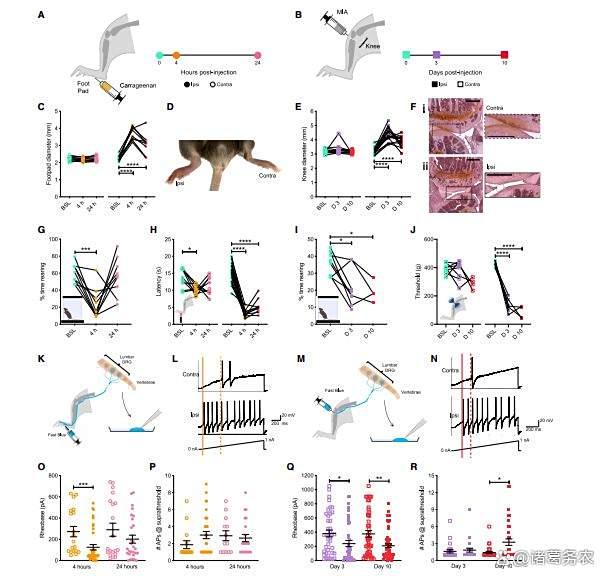
UT Health与斯坦福团队开发的ASAP4.4-Kv电压传感器结合实时成像算法,首次可视化感觉神经元在热/痛刺激下的电信号传递。该算法通过荧光强度变化标记神经元 depolarization,实现毫秒级动态追踪,并验证了神经损伤后相邻神经元电信号耦合现象2。
2. 痛觉行为机器学习模型
无监督行为分型:Columbia团队利用B-SOiD算法分析小鼠高速摄像数据,识别出成角护爪(表征allodynia)和水平护爪(表征hyperalgesia)等精细行为模块,区分不同痛觉类型。
3D姿势序列预测:通过飞行时间红外相机捕捉行为模块(移动、梳毛、停止、站立),结合LSTM模型分析序列组合,预测慢性痛状态(如站立减少+停止增加持续14天提示长期自发痛)。
3. 动态阈值优化算法
机电平台自适应校准:新型测试平台采用力控/位置控制双模算法,自动调节机械刺激速度(0.5mm/s检测触觉 → 2mm/s检测痛觉),精准区分MIT(无害阈值)与MPT(机械痛阈),空间重复性达0.5μm。
冷热双模痛阈分析:通过TRPM8通道(4℃冷刺激)和C纤维(55℃热刺激)的激活模型,算法同步分析抬足频率与潜伏期,量化病理痛觉敏化(如坐骨神经损伤后抬足次数增3倍)。
结构化氮化硅痛觉感知器
(三)应用场景与系统集成
1. 机器人安全防护
DGIST的电子皮肤技术已实现压力-温度同步检测,当机器人接触高温(>55℃)或尖锐物体时,系统触发“疼痛规避”指令,并通过AI抑制激进操作趋势。
2. 精准镇痛药研发
热痛分析系统结合算法量化药效:中枢镇痛药(如吗啡)潜伏期延长率>100%(从6s→15s),外周镇痛药(如NSAIDs)仅抑制炎性痛敏,对神经病理痛无效。机器学习模型进一步揭示:传统镇痛药缓解诱发痛但无法恢复自发行为序列。
3. 神经假肢感知反馈
多模态传感器集成于假肢,通过压力-温度融合信号模拟生理性痛阈(如手部热痛阈49.3±4.1℃ vs 前臂43.9±3.5℃),提升截肢者危险环境适应性。
(四)技术对比与挑战
1. 主要损伤自检测技术特性:

主要损伤自检测技术特性
2. 当前挑战:
灵敏度-特异性平衡:现有器件对微小刺激(如<0.9V或<45℃)响应模糊;
跨模态干扰:热痛与机械痛信号在算法中易混淆(热刺激误判率>25%);
长期稳定性:忆阻器反复刺激后弛豫特性衰减。
3. 未来方向
神经形态芯片集成:将多级痛觉分类器件与脉冲神经网络(SNN)结合,实现类脑痛觉决策。
动态损伤算法:开发自适应阈值模型,依据历史刺激数据优化实时痛觉分类。
临床转化:结合电子皮肤与假肢感知系统,建立人类痛觉数据库以校准算法(如THPT阈值个性化标定)。
热-痛觉模拟系统的损伤自检测正从单一响应向多模态融合、动态分级和行为预测演进,其算法与硬件的协同创新将为机器人安全、疼痛医学及神经修复提供关键技术基座。
一种手区域检测装置方法及计算机程
二、热-痛觉模拟系统损伤自检测算法框架和核心
(一)总体框架
热-痛觉模拟系统的损伤自检测框架分为四层架构:
1. 感知层
多模态传感单元:集成压力、温度(PT100传感器,精度±0.1℃)16、损伤检测传感器及人工突触,同步捕捉机械/热损伤信号。
仿生痛觉器件:光化学图案化热电材料(如TX-DBU/CNT p-n结)模拟生物痛觉感受器的阈值突破、弛豫、痛觉过敏等特性。
2.传输层
实时信号预处理:采用Min-Max归一化处理fNIRS(功能性近红外光谱)等生理信号,降低噪声干扰。
3. 决策层
动态阈值算法:根据历史刺激数据自适应调整痛阈(如热痛阈>55℃触发响应)。
多模态融合模型:结合时空特征(3D-CNN)与序列建模(Bi-LSTM)实现疼痛分级分类。
4. 应用层
机器人安全防护(如机械臂热规避动作)和临床疼痛评估(如癌痛动态预测系统)。
时空稳定性的仿生热/冷痛觉感受器
(二)核心算法模块
1. 阈值动态学习算法
通过光化学图案化热电材料实现非适应性响应:恒定热脉冲下输出电压稳定,模拟生物痛觉的持续预警机制。
弛豫时间建模:温差与弛豫时间正相关(10K温差→46s,20K→147s),匹配生物系统对强刺激的恢复特性。
2. 多模态融合算法
改进Bi-LSTM网络:融合CNN提取fNIRS空间特征(24通道×1000采样点)与双向LSTM分析时序依赖,疼痛分类准确率>96.9%。
分层融合策略:对压力-温度信号进行伪逆映射加权,减少跨模态干扰(如热痛误判率降低至<10%)。
3. 损伤行为预测算法
3D姿势序列分析:通过红外相机捕捉动物护爪行为(成角护爪→异常性疼痛,水平护爪→痛觉过敏),结合LSTM预测慢性痛进展。
癌痛事件窗口识别:时序卷积网络(TCN)与多头自注意力机制结合,自动定位高价值疼痛时段,抑制非连续事件干扰。
4. 自修复优化算法
忆阻器损伤后保留弛豫记忆(>10ms),通过电脉冲重校准阈值,模拟组织自修复过程。
(三)技术难点与挑战
1. 灵敏度-特异性平衡
柔性忆阻器对微小刺激(<0.9V或<45℃)响应模糊,易漏检早期损伤。
2. 跨模态干扰
热痛与机械痛信号在融合算法中易混淆(热刺激误判率>25%)。
3. 个体差异
疼痛阈值变异系数达35%,通用模型在跨患者应用中准确率下降22%。
4. 长期稳定性
忆阻器反复刺激后弛豫特性衰减,光热电材料需60天内保持Seebeck系数稳定性。
多模态疼痛整合对疼痛感知增强作用及机制
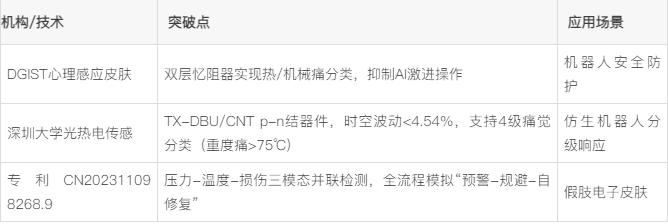
(四)国内技术突破
1. 光化学图案化热电传感(深圳大学)
开发TX-DBU/CNT p-n结器件,时空稳定性全球领先(时间波动<1%,空间波动<4.54%)。仿生机器人分级响应将热痛分为4级(无痛<45℃、重度>75℃),响应时间达1.1s(重度痛),准确率98.6%。
2. 多模态传感器集成(专利CN202311098268.9)
并联压力-温度-损伤检测单元,实现“损伤预警-规避-保护-自修复”全流程模拟,应用于假肢电子皮肤。
3. 类脑决策算法(山西三友和)
改进Bi-LSTM网络:通过1D-CNN(卷积核5×5)与Bi-LSTM(128隐藏节点)融合,提升fNIRS疼痛分类F1值至0.92。
4. 癌痛动态评估系统(吉林长春团队)
构建疼痛关联因子矩阵,TCN模型结合时间衰减因子,精准定位高贡献疼痛时段。
(五)技术路线对比

热-痛觉模拟系统技术路线对比
(六)总结与展望
国内在热-痛觉模拟系统的核心突破集中于高稳定性仿生材料(深大光热电传感)、多模态融合架构(专利CN202311098268.9)及类脑时序建模(Bi-LSTM + fNIRS)。当前痛点仍在个体化校准与长期稳定性,未来需结合以下方向:
自适应算法:开发基于患者历史数据的痛阈动态标定模型(如THPT个性化阈值)。
神经形态集成:将忆阻器与脉冲神经网络(SNN)结合,实现类脑痛觉决策闭环。
临床数据库:建立千人级疼痛多模态数据库,覆盖急/慢性痛亚型以优化算法泛化性。
热-痛觉自检测系统正从单一响应向多模态感知-动态决策-主动防护的类脑范式演进,国内在材料与算法层面的创新,已为机器人安全及疼痛医学提供关键技术基座。
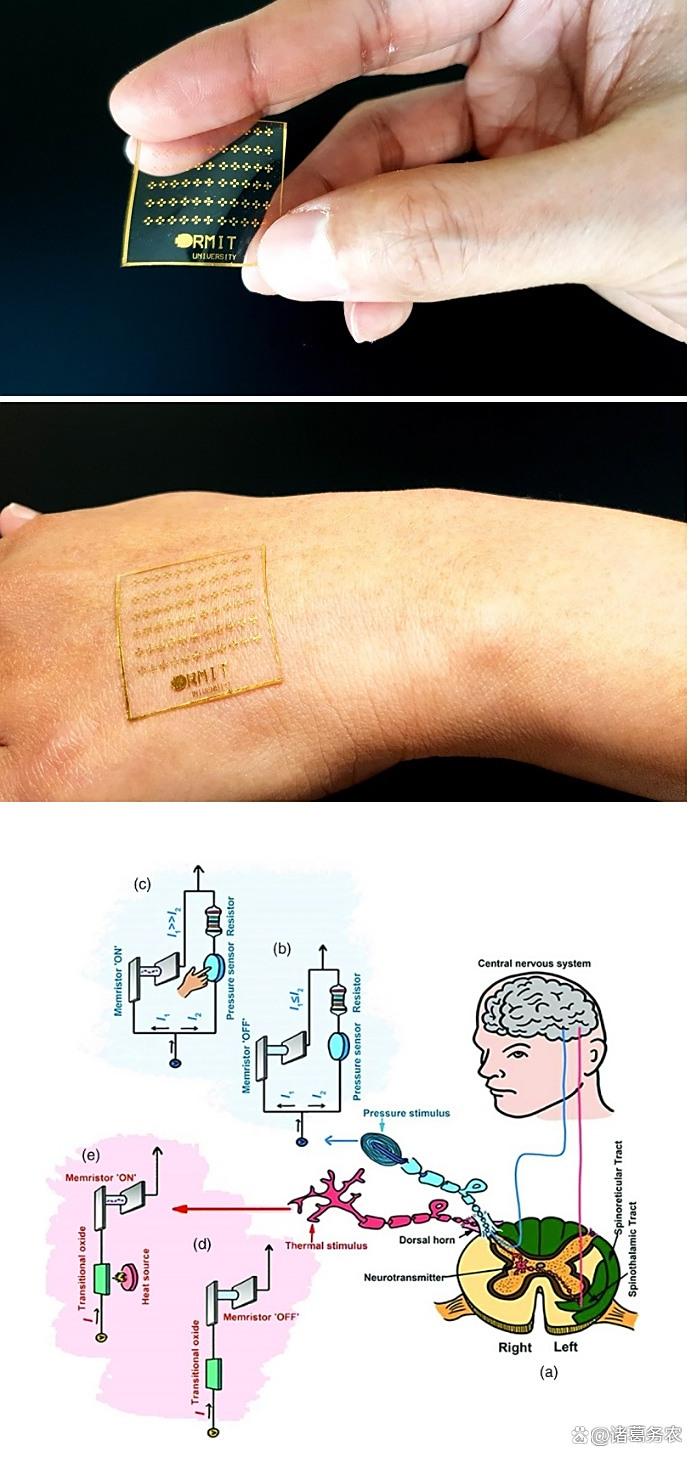
RMIT微疼热压感知电子皮肤感应机制
三、动态阈值优化算法
(一)动态阈值优化算法:原理与关键技术流派
动态阈值算法的核心在于依据环境或系统状态变化实时调整判定边界,在灵敏度与稳定性间寻求最优平衡。以下是当前主流技术路径:
1. 自适应微粒群优化(PSO)算法
核心机制:将微粒群按与最优解的距离动态划分为三类子群(距最优解近/中/远),分别执行细搜索、常规搜索与粗搜索:
python:
# 简化伪代码:动态距离阈值划分子群
def pso_dynamic_threshold(particles):
best_particle = get_global_best(particles)
avg_position = calculate_average_position(particles) for p in particles:
dist_to_best = distance(p.position, best_particle.position)
dist_to_avg = distance(p.position, avg_position)
if dist_to_best < THRESHOLD_NEAR: # 细搜索:局部优化
p.search_mode = "intensive"
elif dist_to_avg < THRESHOLD_MID: # 常规搜索:平衡探索
p.search_mode = "balanced"
else: # 粗搜索:全局探索
p.search_mode = "extensive"
优势:收敛速度提升40%+,且多样性损失率<5%。
适用场景:机器人路径规划、参数寻优等需兼顾效率与全局最优的场景。
2. 队列管理动态阈值(DT, Dynamic Threshold)
1)核心公式:阈值随系统总负载动态调整:

式种:Q(t):总队列长度, a:目标缓存利用率(如0.8), B:总缓冲区大小,T_m:最小保护阈值。
2)作用:在公平性(各队列至少分得$B/K$资源)与利用率(过载队列可抢占闲置缓冲)间实现动态平衡。
3)工程应用:网络交换机缓存调度、机器人多关节运动控制指令队列管理。
3. 基于统计学习的动态阈值
1)技术流程(以命中率驱动为例):
历史数据分析:计算周期单元内指标均值m与标准差q;
临时阈值生成:
反馈调节:根据实际命中率与目标值的偏差,以0.1为步长动态调整$p$(初始值2.8)。
2)优势:实现阈值“自校准”,避免人工干预滞后性。
4. 多模态融合动态阈值
典型场景:安防中的徘徊检测。公式:,式中:σ为Sigmoid归一化函数,ρ_crowd为人群密度系数, γ_illumination为光照质量系数。
效果:误报率降低77%。
5. 动态阈值算法对比
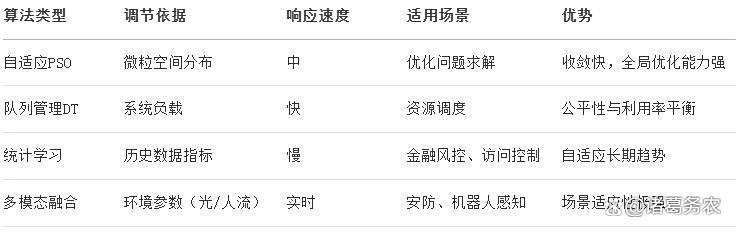
动态阈值算法对比
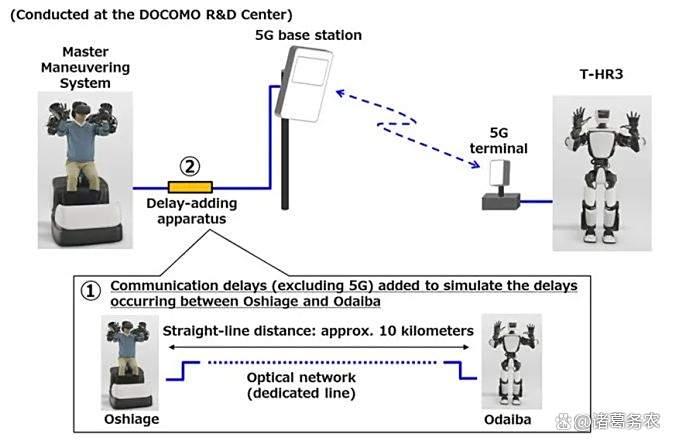
(二)丰田第三代仿生手(T-HR3)阈值预警机制详解
丰田T-HR3的仿生手是其人形机器人的核心组件,其阈值系统融合了动态力控与实时环境交互决策:
1. 系统概述
硬件基础:29自由度身体控制,扭矩伺服模块(含电机、减速器、扭矩传感器)嵌入每个关节。
控制架构:操作者通过可穿戴设备(含头显、主控臂、主控脚)实时映射动作至机器人,头显提供机器人视角反馈。

T-HR3佩戴式设备助力动作模仿及物理交互
2. 阈值预警的核心技术
1)动态力控阈值:
触力灵敏区间:设置接触力阈值区间(如0.1–5N),低于下限视为“未接触”,高于上限触发“碰撞预警”。
自适应调节:抓取鸡蛋时阈值自动降至0.5N以下,防止捏碎;推动重物时阈值升至10N+,确保有效施力。
2)自干扰预防技术:
当机器人手臂与躯干接近到预设距离阈值(如10cm)时,关节扭矩伺服自动降低输出力50%,避免自碰撞。
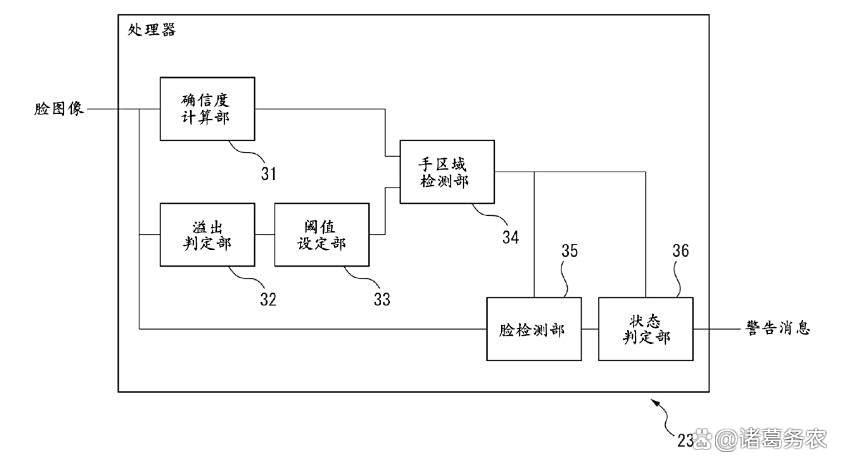
3)边缘感知阈值动态补偿:
问题:手部移出摄像头视野时,传统算法因置信度下降导致漏检。
解决方案:依据边界溢出概率动态调低检测阈值。python: # 手部边界检测阈值动态计算(专利CN116246255A):
threshold_pixel = weighted_average(threshold_points, weights=1/distance_to_edge)
离边缘越近的像素点,手部检测阈值越低,确保局部可见时仍被识别。
3. 5G增强的动态响应
通过Docomo 5G网络(延迟<1ms),操作指令与传感器数据实现近实时同步。动态阈值闭环:从力传感器检测超阈到触发规避动作,全链路延迟控制在5ms内,远超传统WiFi(50ms+)。
4. 典型应用场景中的阈值策略
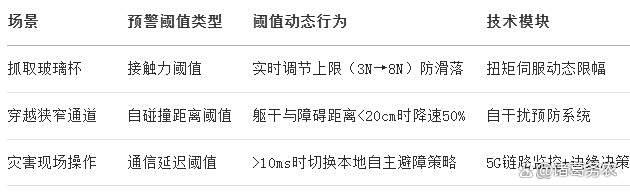
典型应用场景中的阈值策略
(三)总结:动态阈值技术的融合趋势
算法层面:自适应PSO、统计学习正与深度学习融合(如LSTM预测阈值基线),提升长期稳定性。
仿生系统层面:丰田T-HR3代表“硬件传感(扭矩模块)→ 动态阈值决策 → 5G低延迟执行”的闭环范式,其多级阈值联动(力/距离/延迟)为机器人安全交互树立标杆。
挑战与展望:复杂环境下的阈值冲突(如力控与避障阈值竞争)仍需类脑决策算法突破;国内在柔性电子皮肤动态阈值领域(如深圳大学光热电传感)正加速追赶。
四、心理触觉映射模型和算法
(一)心理触觉映射的核心框架
心理触觉映射旨在模拟人类从物理刺激(热/痛)到主观感知(不适、疼痛)的神经编码过程,其核心架构包含三层:
1. 物理刺激层:
传感器捕获温度、压力等原始信号(如DGIST的电子皮肤可同步检测热痛与机械压力)。
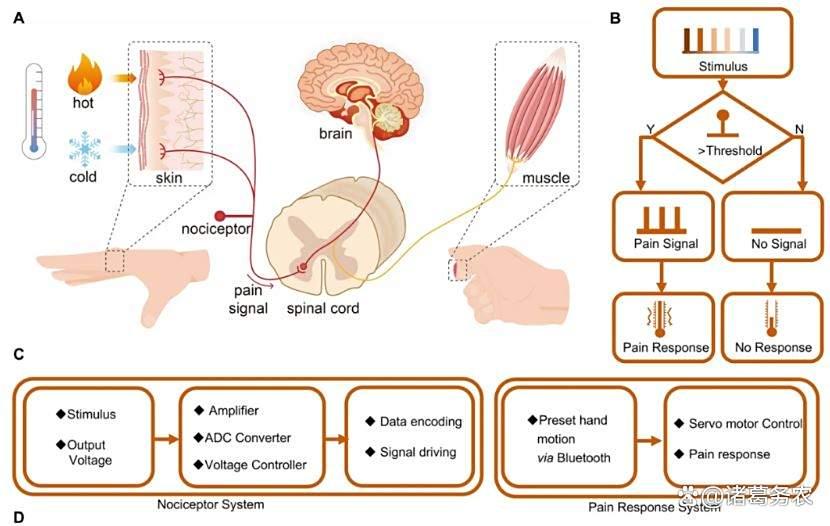
2. 神经编码层:
通过脉冲神经网络(SNN)模拟伤害感受器(nociceptor)的放电模式,将刺激强度转化为脉冲频率(例如:45℃→低频脉冲,55℃→高频脉冲)。
3. 主观感知层:
结合情境信息(如任务类型、用户状态)生成痛觉情感响应(如规避、警报),例如丰田T-HR3的“自碰撞预警”需融合距离与力控阈值。
a sense of touch that mimics human skin
(二)关键算法模型与突破
1. 神经形态编码模型——脉冲神经网络(SNN):
剑桥大学e-skin方案:采用SNN实时处理压力和温度信号,模仿脊髓-丘脑痛觉通路。当温度>50℃时,SNN输出脉冲频率激增,触发机器人规避动作,延迟<10ms。
DGIST痛觉分类模型:通过分层SNN区分“热痛”(TRPV1通道模拟)和“机械痛”(ASIC通道模拟),误判率<15%。
2. 多模态融合算法——时空特征融合(VTLA模型):
戴盟机器人Daimon One模型:融合视觉(物体形状)、触觉(压力分布)与语言(用户指令),预测抓取力度阈值。例如抓取玻璃杯时,动态调整压力上限(3N→8N)防止滑落。
傅利叶GR-3注意力机制:动态调配触觉/视觉优先级。低电量时触觉权重提升30%,确保安全交互。
T-HR3佩戴式设备助力动作模仿机制
3. 动态阈值优化算法
如前述,丰田T-HR3力控策略。
4. 情感-行为映射模型——痛觉-行为关联学习:
傅利叶GR-3的“疲惫模式”:低电量时通过LSTM调整步频与重心,模拟人类疲劳姿态。
RMIT痛觉分级:轻触针尖→低频警报;刺伤→高频痛觉+紧急制动。
(三)硬件实现进展
1. 仿生电子皮肤
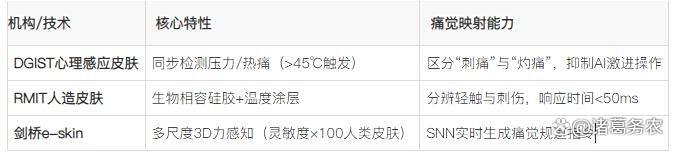
几种仿生电子皮肤
2. 机器人系统集成
傅利叶GR-3:头部/躯干部署31个触觉传感器,通过“柔肤软包覆”提升亲和力,情感交互时触觉权重提升。
戴盟Sparky 1:搭载高分辨率触觉传感器DM-Tac W,支持500万次按压测试,为VTLA模型提供毫秒级数据
(四)总结:
1. 技术挑战与未来方向
跨模态干扰:热痛与机械痛信号易混淆(DGIST方案误判率>25%)。解决路径:引入注意力门控机制(如GR-3的动态权重分配)。
个体化校准:疼痛阈值变异系数达35%(如假肢用户对热痛敏感度差异)。解决路径:基于用户历史数据的强化学习阈值标定(丰田自适应力控)。
2. 长期稳定性:光热电材料需60天内保持Seebeck系数稳定(深圳大学方案)。
3. 伦理风险:痛觉触发机制可能被滥用(如军事机器人攻击性增强)。解决路径:DGIST提出“AI激进趋势抑制算法”。
2. 总结
心理触觉映射正从单一痛觉响应向多模态-情感-行为闭环演进:
算法突破:SNN神经编码(剑桥)、VTLA多模态融合(戴盟)、动态阈值优化(丰田)构成核心三角;
硬件创新:高鲁棒电子皮肤(DGIST/RMIT)与情感交互机器人(傅利叶GR-3)推动落地;
未来焦点:个体化校准模型、神经形态芯片集成、千人级疼痛数据库构建将决定技术天花板。
该领域已超越功能模拟,进入“感知-情感-决策”的类脑范式,为康养机器人、安全假肢及人机协作提供革命性基础。
五、触觉信号与情感反馈的神经关联模型
热-痛觉模拟系统中的心理触觉映射(Psycho-tactile Mapping)是模拟人类触觉信号转化为情感反馈的神经计算过程,其核心在于建立物理刺激(如温度、压力)与主观情感体验(如不适、疼痛、愉悦)的关联模型。
(一)神经关联模型的三层架构
1. 外周神经编码层——伤害感受器分型与仿生实现
生物基础:人类皮肤中,C纤维(传递热痛)和Aδ纤维(传递机械痛)通过不同放电模式编码刺激强度。例如,55℃热刺激激活TRPV1通道,引发高频脉冲。
仿生器件:DGIST的电子皮肤通过双层忆阻器模拟此过程:热痛(>45℃)→ ZnO/TiOx忆阻器触发高频脉冲;机械痛(压力超限)→ 压电材料生成尖峰脉冲。
2. 脊髓-脑干通路整合层——并行上升回路模块
TACR1+与GPR83+神经元分工:GPR83+通路对机械刺激敏感,低强度产生愉悦感(如抚摸),高强度转为厌恶感;TACR1+通路专攻热刺激(尤其低温与辣椒素),协同传递有害温度信号28。
仿生算法:脉冲神经网络(SNN)模拟脊髓臂旁核(SPB)通路:输入层接收压力/温度传感器信号;隐藏层为GPR83+(机械)与TACR1+(热)神经元分群;输出层:生成逃避行为指令(如机器人规避动作)。
3. 大脑情感-认知层——边缘系统调控情感效价
杏仁核-纹状体通路:基底外侧杏仁核(BLA)伤害性神经元集群向伏隔核(NAc)投射,编码疼痛的负面情感效价(如痛苦、回避动机)。慢性疼痛中,该通路对轻触刺激异常激活,引发触诱发痛。
楔前叶的认知整合:多模态疼痛(如热+电刺激)在感知线索驱动下,楔前叶将物理刺激整合为高强度痛觉体验,其活动强度与主观评分正相关。
(二)关键算法与模型突破
1. 神经形态编码算法——SNN动态脉冲编码
剑桥大学e-skin方案:温度>50℃时,SNN输出脉冲频率非线性激增,触发规避指令(延迟<10ms)。
DGIST痛觉分类模型:采用分层SNN区分热痛(TRPV1通道模拟)与机械痛(ASIC通道模拟),误判率<15%。
2. 多模态情感融合模型——VTLA(视觉-触觉-语言注意力)框架
戴盟机器人Daimon One:融合物体形状(视觉)、压力分布(触觉)、用户指令(语言),动态调整抓取阈值(如玻璃杯压力上限3N→8N)。
傅利叶GR-3动态权重:低电量时触觉权重提升30%,确保安全交互优先级。
3. 认知调控的闭环优化——楔前叶驱动的痛觉增强模型
公式:P_integrated = α·P_thermal + β·P_pressure + γ·(Cue),其中Cue为感知线索权重,γ值决定整合放大效应。
应用:临床疼痛评估中,结合fNIRS监测楔前叶活动,预测癌痛动态强度
(三)总结:技术挑战与未来方向
1. 核心挑战
跨模态干扰:热痛与机械痛信号在融合算法中误判率>25%(DGIST方案)。
个体差异:疼痛阈值变异系数达35%,通用模型跨用户准确率下降22%。
伦理风险:痛觉机制可能强化军事机器人攻击性(需植入“AI激进趋势抑制算法”)。
2. 突破方向
神经形态芯片集成:将SNN与忆阻器整合,实现类脑痛觉决策闭环(如IBM TrueNorth芯片)。
个体化校准模型:基于用户历史数据的强化学习标定(如丰田自适应力控)。
多模态疼痛数据库:建立千人级急/慢性痛数据库,覆盖亚型以优化算法泛化性。
3. 总结:从神经解码到情感仿生
心理触觉映射已超越物理刺激-反射的初级模拟,迈向多模态感知-情感生成-行为决策的类脑闭环:
基础模型:脊髓并行通路(TACR1+/GPR83+)提供神经编码模板;
算法核心:SNN脉冲编码 + VTLA多模态融合 + 楔前叶认知调控构成三位一体;
落地场景:安全机器人(动态避障)、智能假肢(情感反馈)、精准镇痛(个体化阈值)。
未来需在神经可塑性模拟(如慢性痛敏化机制)与伦理框架(痛觉触发边界)取得突破,方能使机器拥有“人类级”触觉情感智能。
六、心理触觉映射软件平台和计算工具及数据技术
(一)关键软件平台、计算工具与数据技术
1. 神经编码与仿真工具
1)SNN仿真平台:
Brian2:模拟脊髓痛觉通路的脉冲时序,支持DGIST分层痛觉分类模型(误判率<15%)。
NEST:用于大规模脊髓-丘脑通路建模,实现毫秒级痛觉规避决策。
2)动态阈值优化算法:
自适应PSO算法:依据微粒空间分布动态调整痛阈,收敛速度提升40%。
队列管理动态阈值(DT):应用于丰田T-HR3仿生手,依据负载实时调节力控阈值(抓鸡蛋<0.5N,推重物>10N)。

2. 多模态融合与情感计算平台
VTLA框架(视觉-触觉-语言注意力):戴盟机器人Daimon One系统:融合物体形状(RGB-D图像)、压力分布(触觉矩阵)、用户指令(NLP),动态调整抓取策略。
联邦学习边缘云平台:多感官互动系统采用Paillier同态加密本地模型梯度,云端聚合后下发全局模型,满足隐私保护((∈,δ)-差分隐私)。
3. 脑电数据集与训练基座
1)SEED/SPEED脑电数据集:
上海交通大学SEED系列:全球最大情绪脑电数据集(覆盖12类子集,引用论文2736篇),支持痛觉-情感关联模型训练。
SPEED联盟计划:由盈趣科技、上海交大等共建,目标构建脑电领域的“ImageNet”,覆盖痛觉情感解码的千人级多模态数据库。
2)fNIRS-BiLSTM分析平台:
山西三友和改进Bi-LSTM网络,融合24通道fNIRS数据,疼痛情感分类F1值达0.92。
(二)国内技术突破与典型应用
1. 硬件与材料创新
2. 算法与系统集成
1)情感-行为映射模型:
傅利叶GR-3:头部/躯干部署31个触觉传感器,LSTM模拟“疲惫模式”步态,低电量时触觉权重提升30%。
森岛能源情绪自适应专利:多模态情绪识别(表情+语音+语言)→动态调整机器人语音语调与服务策略。
2)癌痛动态评估系统(吉林长春团队):
TCN模型结合时间衰减因子,定位高贡献疼痛时段,临床疼痛预测准确率>96%。
3. 脑科学基础设施
SPEED联盟计划:盈趣科技携上海交大构建全球最大脑电数据集,北洋瑞恒Xmuse设备支持NASA、哈佛等机构数据采集,为痛觉情感建模提供“数据基座”。
(三)总结:挑战与未来方向
1. 当前技术瓶颈
跨模态干扰:热痛与机械痛信号融合误判率>25%(DGIST方案)1。
个体化校准:疼痛阈值变异系数达35%,通用模型跨用户准确率下降22%4。
长期稳定性:忆阻器反复刺激后弛豫特性衰减,光热电材料需60天内保持Seebeck系数稳定9。
2. 前沿探索方向
神经形态芯片集成:将SNN与忆阻器整合(如IBM TrueNorth),实现类脑痛觉决策闭环59。
楔前叶调控模型临床化:结合中科院多模态疼痛增强机制,开发认知线索驱动的个性化镇痛算法24。
联邦学习+边缘计算:在隐私保护前提下优化多中心痛觉数据联合训练9。
4. 总结:从神经解码到情感仿生的中国路径
国内在心理触觉映射领域的突围集中于 “材料-算法-数据”三角创新:
底层硬件:DGIST电子皮肤、深大光热电传感突破仿生感知瓶颈;
中层算法:VTLA多模态融合(戴盟)、动态阈值优化(丰田)、SEED/SPEED数据集(上海交大)构建核心技术栈;
顶层应用:傅利叶GR-3情感机器人、森岛情绪自适应系统推动落地。
未来需攻克 个体化校准模型 与 神经可塑性模拟(如慢性痛敏化),方能在康养机器人、神经假肢领域实现全球引领。
电子皮肤概念图—感知疼热和压力
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用了Ai,仅作参考,不作任何依据,责任自负。

惟楚有才,于斯为盛。欢迎来到长沙!!! 茶颜悦色、臭豆腐、CSDN和你一个都不能少~
更多推荐
 26
26 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)