
C++AV树
·
前言:
AVL 树:它是空树,左右子树也都是 AVL 树,任意节点的左右子树高度差的绝对值 ≤ 1
简单来说,AVL 树就是「加了严格平衡限制的二叉搜索树」,通过控制高度差来保证树的高度不会无限增长。
一、AVL 树插入的核心流程
AVL 树是自平衡二叉搜索树,核心特性是:任意节点的左右子树高度差(平衡因子)绝对值不超过
1.插入节点的完整流程如下:
- 按二叉搜索树规则插入新节点:保证树的 BST 性质不变
- 回溯更新平衡因子:从新节点向上,更新所有祖先节点的平衡因子
- 根据平衡因子判断终止 / 旋转:
- 平衡因子变为 0:子树高度不变,直接终止
- 平衡因子变为 ±1:子树高度 + 1,继续向上更新
- 平衡因子变为 ±2:子树失衡,旋转修复后终止
二、平衡因子更新的核心规则
1. 基础定义
- 平衡因子 (BF) = 右子树高度 - 左子树高度
- 高度定义:叶子节点高度为 1,非叶子节点高度 =
max(左子树高度, 右子树高度) + 1 - 插入对 BF 的影响:
- 新节点插在父节点左子树 → 父节点 BF -= 1
- 新节点插在父节点右子树 → 父节点 BF += 1
2. 三大终止 / 更新规则

3.三大终止对应三种典型场景
场景 1:插入触发失衡,需要旋转
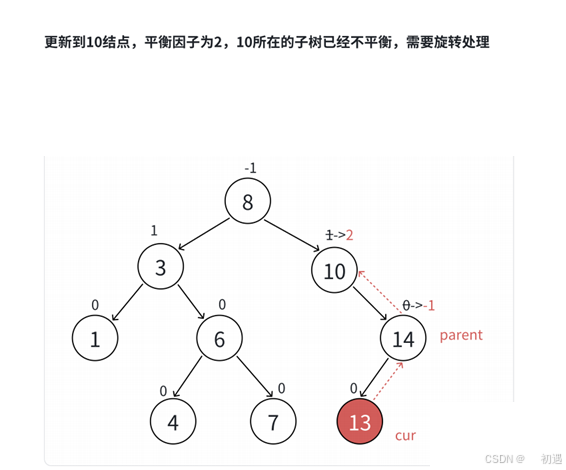
场景说明
新节点13插入在14的左子树,回溯更新时触发10的 BF 变为 2,子树失衡,需要旋转。
详细推导
- 插入前状态:
14的 BF=0(叶子节点),10的 BF=1(右子树14比左子树高 1),8的 BF=-1(左子树3比右子树10高 1)
- 插入后回溯更新:
- 新节点
13插在14左子树 →14的 BF 从0变为-1(0→-1,高度 + 1,继续向上) 14是10的右子树 →10的 BF 从1变为2(1→2,失衡,触发旋转)
- 新节点
- 旋转后终止:旋转会将
10的子树重新调平衡,同时将子树高度恢复到插入前的高度,因此不会影响上层的8,插入流程直接结束。
场景 2:插入中途终止,无需向上更新
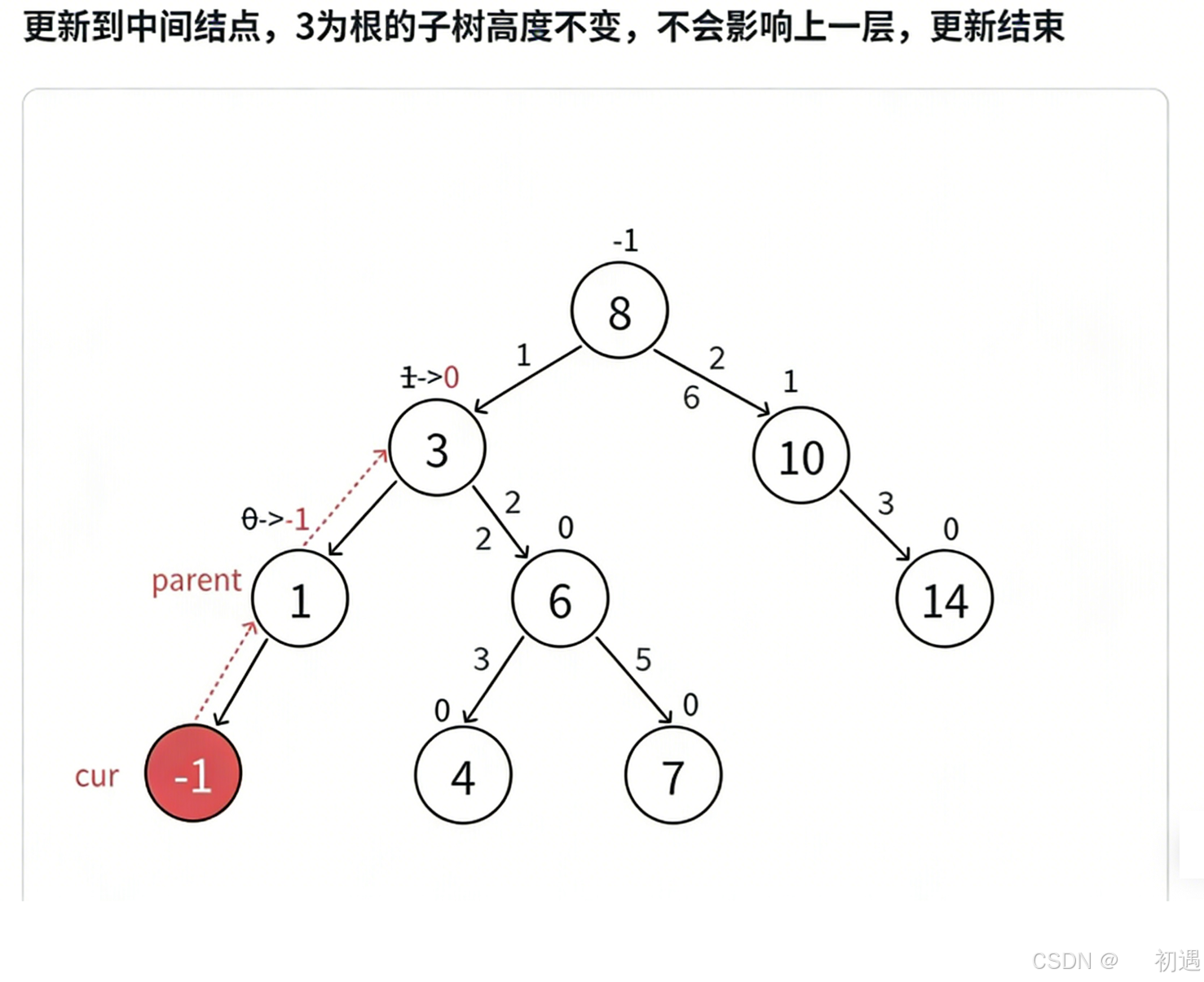
场景说明
新节点插入在1的左子树,回溯更新到3时 BF 变为 0,子树高度不变,直接终止。
详细推导
- 插入前状态:
3的 BF=1(右子树6比左子树1高 1),8的 BF=-1(左子树3比右子树10高 1) - 插入后回溯更新:新节点插在
3的左子树 →3的 BF 从1变为0(1→0,高度不变) - 直接终止:
3的子树高度不变,不会影响上层的8,因此无需继续向上更新,插入流程结束。
场景 3:最坏情况,一路更新到根节点
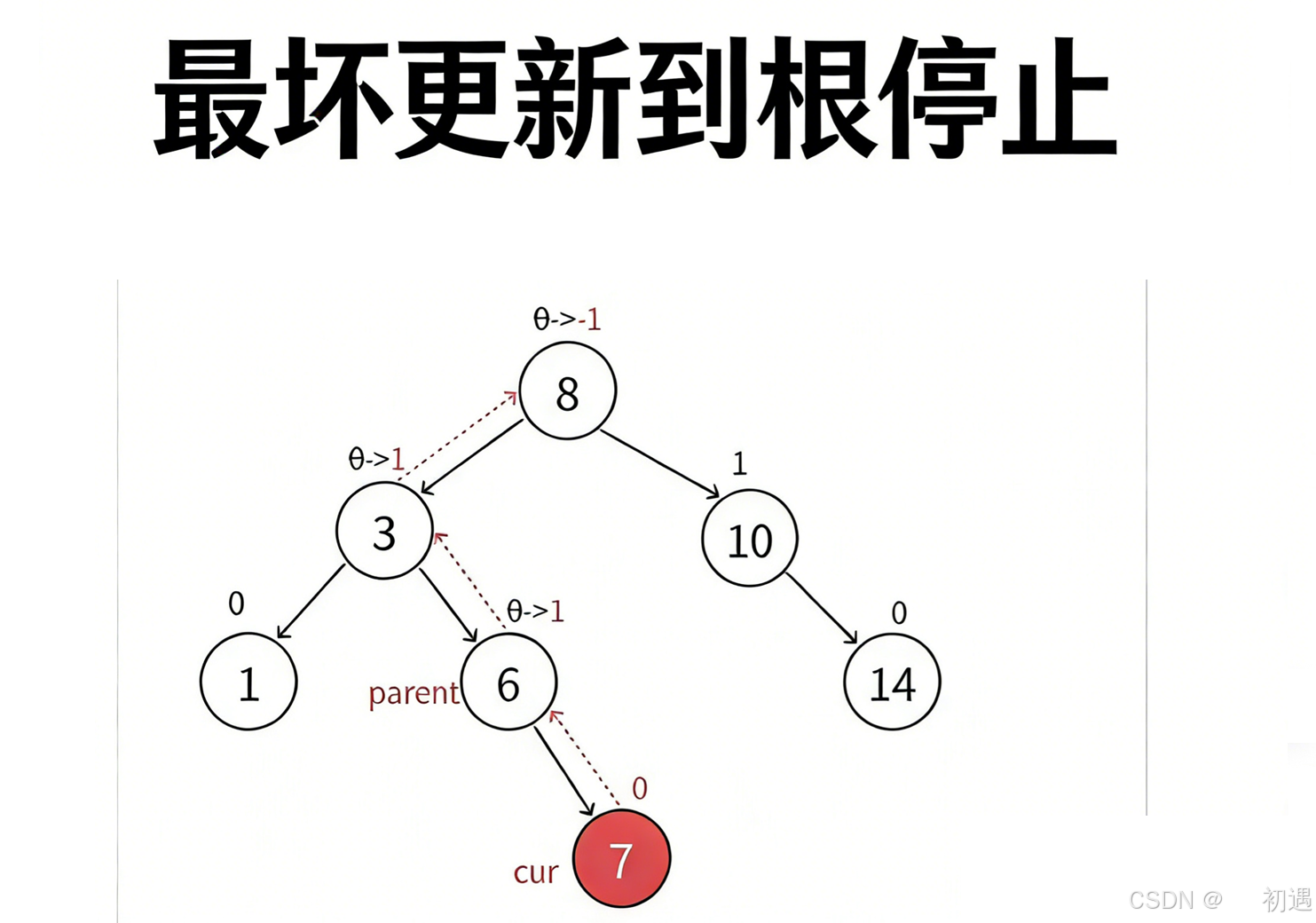
场景说明
新节点7插入在6的右子树,需要一路回溯更新到根节点8,最终触发旋转。
详细推导
- 插入前状态:
6的 BF=0(左右子树等高),3的 BF=1(右子树6比左子树1高 1),8的 BF=-1(左子树3比右子树10高 1) - 插入后回溯更新:
- 新节点
7插在6右子树 →6的 BF 从0变为1(0→1,高度 + 1,继续向上) 6是3的右子树 →3的 BF 从1变为2(1→2,失衡,触发旋转)- 若旋转后根节点
8仍失衡,则继续旋转,直到根节点平衡,这就是「最坏更新到根」的含义
- 新节点
- 旋转后终止:旋转后子树高度恢复,插入流程结束。
插⼊结点及更新平衡因⼦的代码实现
三.AV树插入情况分析
右单旋
1. 触发场景:LL 型失衡
右单旋是 AVL 树中最基础的旋转操作,专门用于修复 **LL 型(左子树的左子树插入)** 导致的失衡:
- 失衡节点
parent(图中10)的平衡因子为-2(左子树高度远高于右子树) - 其左孩子
subL(图中5)的平衡因子为-1/0(新节点插入在subL的左子树a中) - 本质原因:左子树
a插入新节点后高度从h变为h+1,向上回溯更新导致parent失衡
2. 旋转的三大核心目标
- 严格保持二叉搜索树(BST)规则:所有节点满足「左子树 < 根 < 右子树」,大小关系完全不变
- 恢复 AVL 平衡:旋转后所有节点平衡因子回到
-1/0/1的合法范围 - 降低子树高度:将失衡的
h+3高度,恢复为插入前的h+2,不再影响上层祖先
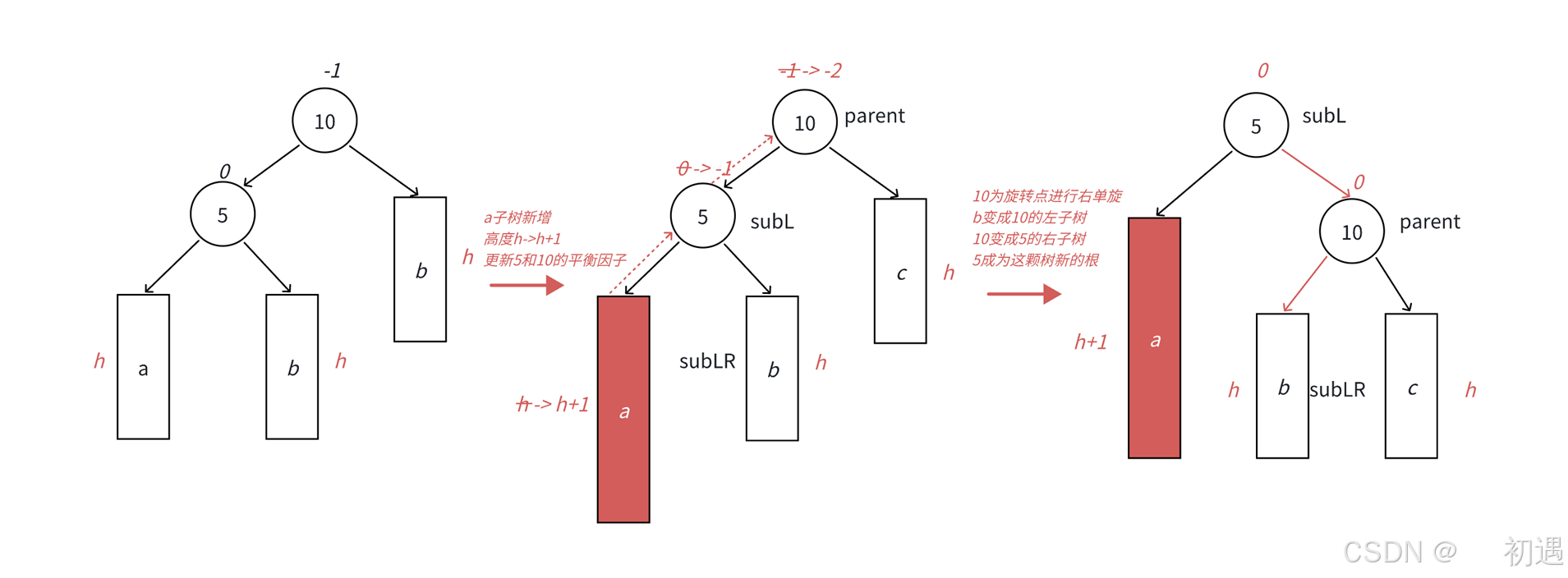
3. 旋转核心步骤(结合图解)
以10为失衡节点、5为左孩子为例,核心操作如下:
- 由于
5 < b子树的值 < 10,将中间子树b(5的右孩子)变为10的左子树 - 将
10变为5的右子树 - 将
5提升为这棵子树的新根 - 旋转后子树高度恢复为
h+2,平衡因子全部重置为0,插入结束
右单旋的完整图解
1. 初始平衡状态(左图)
- 根节点
10:左子树(5为根)高度h+1,右子树b高度h→bf = h - (h+1) = -1(合法) - 节点
5:左右子树a、b高度均为h→bf = 0(合法) - 所有子树
a/b/c均为高度h的 AVL 树,整棵树完全平衡
2. 插入后失衡状态(中图)
- 在
a子树插入新节点,a高度从h变为h+1 - 向上回溯更新平衡因子:
5的bf从0变为-1,10的bf从-1变为-2 10为根的子树左右高度差超过 1,违反 AVL 平衡规则,触发右单旋
3. 旋转后平衡状态(右图)
- 中间子树
b成为10的左子树,10成为5的右子树,5成为新根 5和10的平衡因子均重置为0,子树高度恢复为h+2- 整棵树重新满足 AVL 平衡规则,且 BST 大小关系完全不变
// 右单旋:parent为失衡节点(bf=-2),subL为其左孩子
void RotateR(Node* parent)
{
Node* subL = parent->_left; // 左孩子5(subL:sub Left)
Node* subLR = subL->_right; // 中间子树b(subLR:sub Left Right)
// 1. 迁移中间子树:b成为parent(10)的左孩子
parent->_left = subLR;
// 注意:如果subLR不为空,必须更新其parent指针(空指针不能访问成员,否则崩溃)
if (subLR != nullptr)
{
subLR->_parent = parent;
}
// 2. parent(10)成为subL(5)的右孩子
subL->_right = parent;
// 更新parent的父指针为subL
parent->_parent = subL;
// 3. 保存parent的父节点,用于后续更新上层指针
Node* pParent = parent->_parent;
// 4. 处理parent的父节点(分根节点/局部子树两种情况)
if (parent == _root)
{
// 情况1:parent是整棵树的根,subL成为新根
_root = subL;
subL->_parent = nullptr; // 根节点父指针必须为空
}
else
{
// 情况2:parent是局部子树,判断它是父节点的左/右孩子
if (pParent->_left == parent)
{
pParent->_left = subL;
}
else
{
pParent->_right = subL;
}
// 更新subL的父指针为原parent的父节点
subL->_parent = pParent;
}
// 5. 更新平衡因子:旋转后parent和subL的bf均为0
subL->_bf = 0;
parent->_bf = 0;
}易错点
- 空指针安全:
subLR可能为空(如5没有右孩子),必须加if (subLR != nullptr)判断,否则会触发段错误 - 父指针维护:AVL 树采用三叉链结构(
left/right/parent),旋转后必须同步更新所有相关节点的parent指针,否则树结构会断裂 - 根节点处理:区分
parent是整棵树的根还是局部子树的根,分别处理上层指针 - 平衡因子重置:旋转后
subL和parent的平衡因子均为0,无需再向上更新,插入直接结束
左单旋
1. 触发场景:RR 型失衡
左单旋是 AVL 树中与右单旋对称的基础旋转操作,专门用于修复 **RR 型(右子树的右子树插入)** 导致的失衡:
- 失衡节点
parent(图中10)的平衡因子为2(右子树高度远高于左子树) - 其右孩子
subR(图中15)的平衡因子为1/0(新节点插入在subR的右子树a中) - 本质原因:右子树
a插入新节点后高度从h变为h+1,向上回溯更新导致parent失衡
2. 旋转的三大核心目标
- 严格保持二叉搜索树(BST)规则:所有节点满足「左子树 < 根 < 右子树」,大小关系完全不变
- 恢复 AVL 平衡:旋转后所有节点平衡因子回到
-1/0/1的合法范围 - 降低子树高度:将失衡的
h+3高度,恢复为插入前的h+2,不再影响上层祖先
3. 旋转核心步骤(结合图解)
以10为失衡节点、15为右孩子为例,核心操作如下:
- 由于
10 < b子树的值 < 15,将中间子树b(15的左孩子)变为10的右子树 - 将
10变为15的左子树 - 将
15提升为这棵子树的新根 - 旋转后子树高度恢复为
h+2,平衡因子全部重置为0,插入结束
左单旋的完整图解
1. 初始平衡状态(左图)
- 根节点
10:左子树c高度h,右子树(15为根)高度h+1→bf = (h+1) - h = 1(合法) - 节点
15:左右子树b、a高度均为h→bf = 0(合法) - 所有子树
a/b/c均为高度h的 AVL 树,整棵树完全平衡
2. 插入后失衡状态(中图)
- 在
a子树插入新节点,a高度从h变为h+1 - 向上回溯更新平衡因子:
15的bf从0变为1,10的bf从1变为2 10为根的子树左右高度差超过 1,违反 AVL 平衡规则,触发左单旋
3. 旋转后平衡状态(右图)
- 中间子树
b成为10的右子树,10成为15的左子树,15成为新根 10和15的平衡因子均重置为0,子树高度恢复为h+2- 整棵树重新满足 AVL 平衡规则,且 BST 大小关系完全不变
// 左单旋:parent为失衡节点(bf=2),subR为其右孩子
void RotateL(Node* parent)
{
Node* subR = parent->_right; // 右孩子15(subR:sub Right)
Node* subRL = subR->_left; // 中间子树b(subRL:sub Right Left)
// 1. 迁移中间子树:b成为parent(10)的右孩子
parent->_right = subRL;
// 注意:如果subRL不为空,必须更新其parent指针(空指针不能访问成员,否则崩溃)
if (subRL != nullptr)
{
subRL->_parent = parent;
}
// 2. parent(10)成为subR(15)的左孩子
subR->_left = parent;
// parent的父指针必须指向subR(新根),而非subRL
parent->_parent = subR;
// 3. 保存parent的父节点,用于后续更新上层指针
Node* pParent = parent->_parent;
// 4. 处理parent的父节点(分根节点/局部子树两种情况)
if (pParent == nullptr)
{
// 情况1:parent是整棵树的根,subR成为新根
_root = subR;
subR->_parent = nullptr; // 根节点父指针必须为空
}
else
{
// 情况2:parent是局部子树,判断它是父节点的左/右孩子
if (pParent->_left == parent)
{
pParent->_left = subR;
}
else
{
pParent->_right = subR;
}
// 更新subR的父指针为原parent的父节点
subR->_parent = pParent;
}
// 5. 更新平衡因子:旋转后parent和subR的bf均为0
parent->_bf = 0;
subR->_bf = 0;
}代码关键细节
- 空指针安全:
subRL可能为空(如15没有左孩子),必须加if (subRL != nullptr)判断,否则会触发段错误 - 父指针维护:AVL 树采用三叉链结构(
left/right/parent),旋转后必须同步更新所有相关节点的parent指针,否则树结构会断裂 - 根节点处理:区分
parent是整棵树的根还是局部子树的根,分别处理上层指针 - 平衡因子重置:旋转后
subR和parent的平衡因子均为0,无需再向上更新,插入直接结束 - 与右单旋的对称性:左单旋是右单旋的完全镜像,仅需将
left/right互换、subL/subR互换即可
左右双旋
1. 触发场景:LR 型失衡
左右双旋是 AVL 树中用于修复 **LR 型(左子树的右子树插入)** 失衡的复合旋转操作,是单旋的组合应用:
- 失衡节点
parent(图中10)的平衡因子为-2(左子树整体太高) - 其左孩子
subL(图中5)的平衡因子为1(新节点插入在subL的右子树中) - 本质原因:
subL的右子树插入新节点后,导致parent左子树高度异常,无法通过单次单旋直接修复,必须先左单旋、再右单旋
2. 旋转的三大核心目标
- 严格保持二叉搜索树(BST)规则:所有节点满足「左子树 < 根 < 右子树」,大小关系完全不变
- 恢复 AVL 平衡:旋转后所有节点平衡因子回到
-1/0/1的合法范围 - 降低子树高度:将失衡的
h+3高度,恢复为插入前的h+2,不再影响上层祖先
二、两种典型插入场景的完整图解
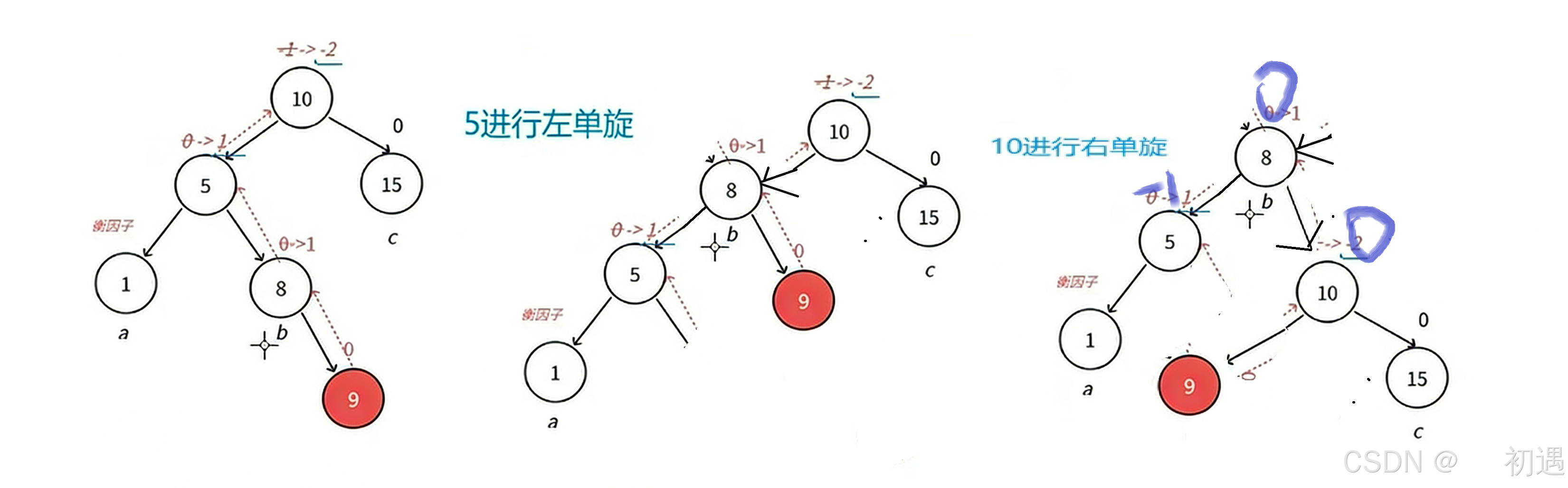
场景 1:8 的右子树插入 9(LR 型,subLR.bf=1)
1. 插入前平衡状态
- 根节点
10:左子树(5为根)高度 2,右子树15高度 1 →bf = 1-2 = -1(合法) - 节点
5:左子树1高度 1,右子树8高度 1 →bf = 1-1 = 0(合法) - 节点
8:左右子树高度 0 →bf = 0(合法) - 所有节点平衡因子均在
-1/0/1范围内,树完全平衡
2. 插入 9 后失衡状态
- 按 BST 规则,
9 > 8,插入为8的右孩子(红色节点) - 向上回溯更新平衡因子:
8:插入在右子树 →bf从0→1(高度 + 1,继续)5:插入在右子树 →bf从0→1(高度 + 1,继续)10:插入在左子树 →bf从-1→-2(失衡!,触发 LR 型双旋)
3. 双旋修复过程
- 第一步:对 5 做左单旋
- 将
8提升为5的父节点,5成为8的左孩子,8的左子树(空)成为5的右孩子 - 此时
10的左孩子变为8,10的bf仍为-2,LR 型转化为 LL 型
- 将
- 第二步:对 10 做右单旋
- 将
8提升为10的父节点,10成为8的右孩子,8的右子树(5的右子树)成为10的左孩子 - 旋转后树结构恢复平衡,高度回到插入前的 3 层
- 将
4. 最终平衡状态
- 新根
8,左孩子5,右孩子10 5的左孩子1,右孩子(空);10的左孩子9,右孩子15- 所有节点平衡因子均为
0,完全符合 AVL 规则
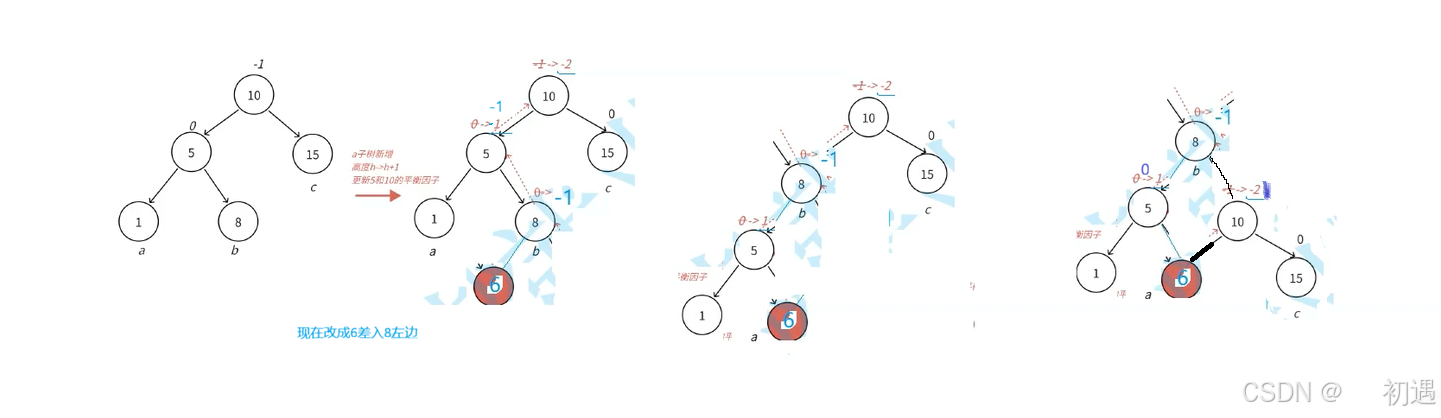
场景 2:8 的左子树插入 6(LR 型,subLR.bf=-1)
1. 插入前平衡状态
- 根节点
10:左子树(5为根)高度 2,右子树15高度 1 →bf = -1(合法) - 节点
5:左子树1高度 1,右子树8高度 1 →bf = 0(合法) - 节点
8:左右子树高度 0 →bf = 0(合法)
2. 插入 6 后失衡状态
- 按 BST 规则,
6 < 8且6 > 5,插入为8的左孩子(红色节点) - 向上回溯更新平衡因子:
8:插入在左子树 →bf从0→-1(高度 + 1,继续)5:插入在右子树 →bf从0→1(高度 + 1,继续)10:插入在左子树 →bf从-1→-2(失衡!,触发 LR 型双旋)
3. 双旋修复过程
- 第一步:对 5 做左单旋
- 将
8提升为5的父节点,5成为8的左孩子,8的左子树6成为5的右孩子 - 此时
10的左孩子变为8,10的bf仍为-2,LR 型转化为 LL 型
- 将
- 第二步:对 10 做右单旋
- 将
8提升为10的父节点,10成为8的右孩子,8的右子树(空)成为10的左孩子 - 旋转后树结构恢复平衡,高度回到插入前的 3 层
- 将
4. 最终平衡状态
- 新根
8,左孩子5,右孩子10 5的左孩子1,右孩子6;10的左孩子(空),右孩子15- 所有节点平衡因子均合法,完全符合 AVL 规则
抽象通用场景(覆盖所有 LR 型情况)
下图是 LR 型双旋的抽象通用模型,a/e/f/c为高度h的 AVL 子树,覆盖了所有插入场景:
- 初始状态:
10为根,5为左孩子,8为5的右孩子 - 插入后:在
e(8的左子树)或f(8的右子树)插入新节点,导致10的bf变为-2 - 双旋过程:先对
5左单旋,再对10右单旋,根据8的bf值更新所有节点的bf - 最终状态:
8为新根,5为左孩子,10为右孩子,子树高度恢复,所有节点bf合法
// 左右双旋:parent为失衡节点(bf=-2),subL为其左孩子,subLR为subL的右孩子
// 用于修复LR型失衡:parent.bf=-2,subL.bf=1
void RotateLR(Node* parent)
{
Node* subL = parent->_left; // 左孩子5(subL:sub Left)
Node* subLR = subL->_right; // 中间节点8(subLR:sub Left Right)
int bf = subLR->_bf; // 保存中间节点的平衡因子,用于后续更新
// 第一步:对subL(5)做左单旋,将LR型转化为LL型
RotateL(parent->_left);
// 第二步:对parent(10)做右单旋,最终修复失衡
RotateR(parent);
// 根据中间节点subLR(8)的平衡因子,更新所有节点的bf
if (bf == 0)
{
// 场景:subLR原本平衡,插入后bf=0(如subLR为叶子节点插入)
subL->_bf = 0;
subLR->_bf = 0;
parent->_bf = 0;
}
else if (bf == -1)
{
// 场景:新节点插入在subLR的左子树(如8的左孩子插入6)
subL->_bf = 0;
subLR->_bf = 0;
parent->_bf = 1;
}
else if (bf == 1)
{
// 场景:新节点插入在subLR的右子树(如8的右孩子插入9)
subL->_bf = -1;
subLR->_bf = 0;
parent->_bf = 0;
}
else
{
// 非法情况,触发断言,方便调试
assert(false);
}
}代码关键细节说明
- 旋转顺序:必须先左单旋(对 subL),再右单旋(对 parent),顺序不可颠倒,否则会破坏 BST 结构
- 中间节点 bf 保存:旋转前必须保存
subLR的 bf 值,因为旋转会修改节点的 bf,导致后续判断错误 - 三种 bf 分支逻辑:
bf=0:中间节点原本平衡,插入后仍平衡,所有节点 bf 重置为 0bf=-1:新节点插入中间节点左子树(如插入 6),parent 的 bf 为 1bf=1:新节点插入中间节点右子树(如插入 9),subL 的 bf 为 - 1
- 空指针安全:依赖
RotateL/RotateR中的空指针判断,无需额外处理 - 父指针维护:由
RotateL/RotateR完成,无需重复操作,保证三叉链结构完整
右左双旋
触发场景:RL 型失衡
右左双旋是 AVL 树中与左右双旋(LR 型)完全对称的复合旋转操作,专门用于修复 **RL 型(右子树的左子树插入)** 导致的失衡:
- 失衡节点
parent(图中10)的平衡因子为2(右子树整体太高) - 其右孩子
subR(图中15)的平衡因子为-1(新节点插入在subR的左子树中) - 本质原因:
subR的左子树插入新节点后,导致parent右子树高度异常,无法通过单次单旋直接修复,必须先右单旋、再左单旋
2. 旋转的三大核心目标
- 严格保持二叉搜索树(BST)规则:所有节点满足「左子树 < 根 < 右子树」,大小关系完全不变
- 恢复 AVL 平衡:旋转后所有节点平衡因子回到
-1/0/1的合法范围 - 降低子树高度:将失衡的
h+3高度,恢复为插入前的h+2,不再影响上层祖先
右左双旋的完整图解与场景分析
1. 抽象模型与初始状态
我们将a/b/c抽象为高度为h的 AVL 子树,进一步展开b子树为节点12,以及其高度为h-1的左右子树e、f,覆盖所有 RL 型失衡场景:
- 初始平衡状态:根节点
10,右孩子15,15的左孩子12 - 节点
10的平衡因子:1(右子树高度h+1,左子树高度h,合法) - 节点
15的平衡因子:0(左右子树高度均为h,合法) - 节点
12的平衡因子:0(左右子树高度均为h-1,合法)
2. 三种典型插入场景
场景 1:h >= 1,e子树(12的左子树)插入新节点
- 插入后失衡:
e子树高度从h-1变为h,向上回溯更新平衡因子:12的bf从0变为-115的bf从0变为-110的bf从1变为2(失衡!,触发 RL 型双旋)
- 双旋过程:
- 第一步:对
15做右单旋,将12提升为15的父节点,把 RL 型转化为 RR 型 - 第二步:对
10做左单旋,将12提升为10的父节点,彻底修复失衡
- 第一步:对
- 最终平衡因子:
10的bf=0,12的bf=0,15的bf=1
场景 2:h >= 1,f子树(12的右子树)插入新节点
- 插入后失衡:
f子树高度从h-1变为h,向上回溯更新平衡因子:12的bf从0变为115的bf从0变为-110的bf从1变为2(失衡!,触发 RL 型双旋)
- 双旋过程:
- 第一步:对
15做右单旋,将12提升为15的父节点,把 RL 型转化为 RR 型 - 第二步:对
10做左单旋,将12提升为10的父节点,彻底修复失衡
- 第一步:对
- 最终平衡因子:
15的bf=0,12的bf=0,10的bf=-1
场景 3:h == 0,b子树为新增节点(a/b/c均为空)
- 插入后失衡:
12作为新增节点插入15的左子树,向上回溯更新平衡因子:15的bf从0变为-110的bf从1变为2(失衡!,触发 RL 型双旋)
- 双旋过程:
- 第一步:对
15做右单旋,将12提升为15的父节点 - 第二步:对
10做左单旋,将12提升为10的父节点
- 第一步:对
- 最终平衡因子:
10、12、15的bf均为0
// 右左双旋:parent为失衡节点(bf=2),subR为其右孩子,subRL为subR的左孩子
// 用于修复RL型失衡:parent.bf=2,subR.bf=-1
void RotateRL(Node* parent)
{
Node* subR = parent->_right; // 右孩子15(subR:sub Right)
Node* subRL = subR->_left; // 中间节点12(subRL:sub Right Left)
int bf = subRL->_bf; // 保存中间节点的平衡因子,用于后续更新
// 第一步:对subR(15)做右单旋,将RL型转化为RR型
RotateR(parent->_right);
// 第二步:对parent(10)做左单旋,最终修复失衡
RotateL(parent);
// 根据中间节点subRL(12)的平衡因子,更新所有节点的bf
if (bf == 0)
{
// 场景3:h==0,中间节点为新增节点,bf=0
// 旋转后所有节点bf均为0
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = 0;
}
else if (bf == 1)
{
// 场景2:新节点插入在subRL的右子树(f子树),bf=1
// 旋转后parent(10)的bf=-1,subR(15)和subRL(12)的bf=0
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = -1;
}
else if (bf == -1)
{
// 场景1:新节点插入在subRL的左子树(e子树),bf=-1
// 旋转后subR(15)的bf=1,subRL(12)和parent(10)的bf=0
subR->_bf = 1;
subRL->_bf = 0;
parent->_bf = 0;
}
else
{
// 非法情况,触发断言,方便调试
assert(false);
}
}代码关键细节说明
- 旋转顺序:必须先右单旋(对 subR),再左单旋(对 parent),顺序不可颠倒,否则会破坏 BST 结构
- 中间节点 bf 保存:旋转前必须保存
subRL的 bf 值,因为旋转会修改节点的 bf,导致后续判断错误 - 三种 bf 分支逻辑:
bf=0:中间节点为新增节点(h==0场景),所有节点 bf 重置为 0bf=1:新节点插入中间节点右子树(f子树),parent的 bf 为-1bf=-1:新节点插入中间节点左子树(e子树),subR的 bf 为1
- 与左右双旋的对称性:右左双旋是左右双旋的完全镜像,仅需将
left/right互换、subL/subR互换即可 - 空指针安全:依赖
RotateR/RotateL中的空指针判断,无需额外处理 - 父指针维护:由
RotateR/RotateL完成,无需重复操作,保证三叉链结构完整
四.完整实现代码
#include <iostream>
#include <cassert>
using namespace std;
// AVL树节点结构(三叉链:left/right/parent + 平衡因子bf)
struct Node
{
int _val; // 节点值
Node* _left; // 左孩子
Node* _right; // 右孩子
Node* _parent; // 父节点
int _bf; // 平衡因子:右子树高度 - 左子树高度
// 构造函数
Node(int val)
: _val(val)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _bf(0)
{}
};
// AVL树类
class AVLTree
{
private:
Node* _root; // 根节点
public:
// 构造函数
AVLTree()
: _root(nullptr)
{}
// 插入节点(对外接口)
bool Insert(int val)
{
// 1. 按BST规则插入
if (_root == nullptr)
{
_root = new Node(val);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
// 找到插入位置
while (cur != nullptr)
{
parent = cur;
if (cur->_val < val)
cur = cur->_right;
else if (cur->_val > val)
cur = cur->_left;
else
return false; // 值重复,插入失败
}
// 新建节点
cur = new Node(val);
if (parent->_val < val)
parent->_right = cur;
else
parent->_left = cur;
cur->_parent = parent;
// 2. 回溯更新平衡因子 + 旋转修复
while (parent != nullptr)
{
// 更新父节点平衡因子
if (parent->_left == cur)
parent->_bf--;
else
parent->_bf++;
// 判断是否需要继续向上更新
if (parent->_bf == 0)
{
// 高度不变,终止更新
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
// 高度变化,继续向上
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
// 失衡,旋转修复
if (parent->_bf == 2)
{
// RR / RL
if (cur->_bf == 1)
{
// RR型:左单旋
RotateL(parent);
}
else
{
// RL型:右左双旋
RotateRL(parent);
}
}
else // parent->_bf == -2
{
// LL / LR
if (cur->_bf == -1)
{
// LL型:右单旋
RotateR(parent);
}
else
{
// LR型:左右双旋
RotateLR(parent);
}
}
break;
}
}
return true;
}
// 中序遍历(验证BST性质:有序)
void InOrder()
{
_InOrder(_root);
cout << endl;
}
// 验证是否是AVL树(对外接口)
bool IsAVLTree()
{
return _IsAVLTree(_root);
}
private:
// 中序遍历递归实现
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->_left);
cout << root->_val << " ";
_InOrder(root->_right);
}
// 获取树高度
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int leftH = _Height(root->_left);
int rightH = _Height(root->_right);
return leftH > rightH ? leftH + 1 : rightH + 1;
}
// 递归验证AVL树合法性
bool _IsAVLTree(Node* root)
{
if (root == nullptr)
return true;
int leftH = _Height(root->_left);
int rightH = _Height(root->_right);
// 验证平衡因子
if (rightH - leftH != root->_bf)
{
cout << "平衡因子异常:" << root->_val << endl;
return false;
}
// 验证高度差绝对值 ≤1
if (abs(leftH - rightH) > 1)
{
cout << "失衡节点:" << root->_val << endl;
return false;
}
// 递归验证左右子树
return _IsAVLTree(root->_left) && _IsAVLTree(root->_right);
}
// ===================== 你提供的四种旋转(完全不变)=====================
// 右单旋:LL型
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR != nullptr)
{
subLR->_parent = parent;
}
subL->_right = parent;
parent->_parent = subL;
Node* pParent = parent->_parent;
if (parent == _root)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (pParent->_left == parent)
{
pParent->_left = subL;
}
else
{
pParent->_right = subL;
}
subL->_parent = pParent;
}
subL->_bf = 0;
parent->_bf = 0;
}
// 左单旋:RR型
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL != nullptr)
{
subRL->_parent = parent;
}
subR->_left = parent;
parent->_parent = subR;
Node* pParent = parent->_parent;
if (pParent == nullptr)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (pParent->_left == parent)
{
pParent->_left = subR;
}
else
{
pParent->_right = subR;
}
subR->_parent = pParent;
}
parent->_bf = 0;
subR->_bf = 0;
}
// 左右双旋:LR型
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
RotateL(parent->_left);
RotateR(parent);
if (bf == 0)
{
subL->_bf = 0;
subLR->_bf = 0;
parent->_bf = 0;
}
else if (bf == -1)
{
subL->_bf = 0;
subLR->_bf = 0;
parent->_bf = 1;
}
else if (bf == 1)
{
subL->_bf = -1;
subLR->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}
// 右左双旋:RL型
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(parent->_right);
RotateL(parent);
if (bf == 0)
{
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = 0;
}
else if (bf == 1)
{
subR->_bf = 0;
subRL->_bf = 0;
parent->_bf = -1;
}
else if (bf == -1)
{
subR->_bf = 1;
subRL->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}
};
// 测试代码
int main()
{
AVLTree tree;
// 测试插入(可自行修改)
int arr[] = { 10, 5, 14, 3, 8, 13, 15 };
for (int e : arr)
{
tree.Insert(e);
}
// 中序遍历验证BST
cout << "中序遍历:";
tree.InOrder();
// 验证是否是合法AVL树
if (tree.IsAVLTree())
cout << "是合法AVL树" << endl;
else
cout << "不是AVL树" << endl;
return 0;
}更多推荐

 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)