
3D MIMO波束成形实战:从Bartlett到MUSIC算法的完整实现【附全部python代码】
3D MIMO波束成形实战:从Bartlett到MUSIC算法的完整实现
在 5G/6G 通信、雷达探测等领域,3D MIMO 波束成形技术是实现高精度目标定位的核心。不同于传统 2D 波束成形仅关注方位角,3D 波束成形同时对方位角(Azimuth) 和仰角(Elevation) 进行空域扫描,能更精准地捕捉空间目标的位置信息。本文将从理论原理出发,结合完整的工程代码,详解 Bartlett(常规波束成形)和 MUSIC(多重信号分类)两种经典算法的实现逻辑,以及 3D 波束成形系统的核心设计思路。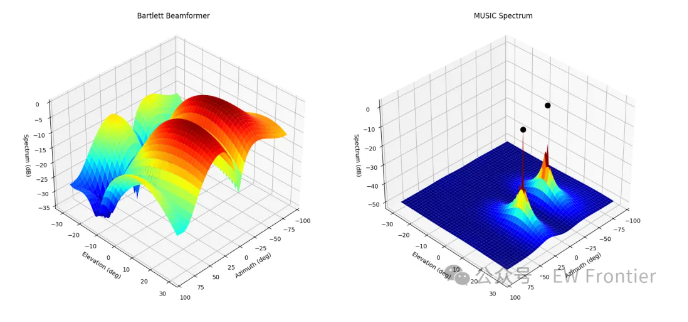
一、核心理论基础
1.1 阵列天线几何模型
本文采用 4×4 平面矩形阵列(NX=4,NY=4),阵元间距为半波长(λ/2)—— 这是阵列设计的经典选择,可避免栅瓣效应。阵列位置坐标通过网格生成:
其中 λ 为载波波长,由光速 c = 3 × 10 8 m/s c=3×10^8\ \text{m/s} c=3×108 m/s和载波频率 f c = 77 GHz f_c=77\ \text{GHz} fc=77 GHz计算得: λ = c / f c ≈ 3.89 mm \lambda = c/f_c ≈ 3.89\ \text{mm} λ=c/fc≈3.89 mm,因此阵元间距 d ≈ 1.945 mm d≈1.945\ \text{mm} d≈1.945 mm。
阵列所有阵元的位置可表示为二维矩阵:
其中 x i j , y i j x_{ij}, y_{ij} xij,yij分别为第 i i i行第 j j j列阵元的 x、y 坐标。
1.2 导向矢量(Steering Vector)
导向矢量是波束成形的核心,描述了 “空间某一角度的电磁波到达各阵元时的相位延迟”。对于方位角 θ \theta θ(单位:弧度)、仰角 ϕ \phi ϕ(单位:弧度),导向矢量 a ( θ , ϕ ) \mathbf{a}(\theta, \phi) a(θ,ϕ)的每个元素对应一个阵元的相位响应:
其中 j j j为虚数单位, x , y x,y x,y为阵元坐标。该公式的物理意义是:电磁波从 ( θ , ϕ ) (\theta, \phi) (θ,ϕ)方向入射时,不同阵元因空间位置差产生的相位差,决定了阵列对该方向信号的 “指向性”。
1.3 协方差矩阵估计
接收信号的协方差矩阵反映了阵列接收数据的空域相关性,是波束成形的基础输入。设接收数据矩阵 X ∈ C N × M \mathbf{X} \in \mathbb{C}^{N×M} X∈CN×M( N N N为阵元数, M M M为快拍数),样本协方差矩阵计算为:
其中 X H \mathbf{X}^H XH表示共轭转置, M M M为快拍数(本文取 300),足够多的快拍数可保证协方差矩阵的估计精度。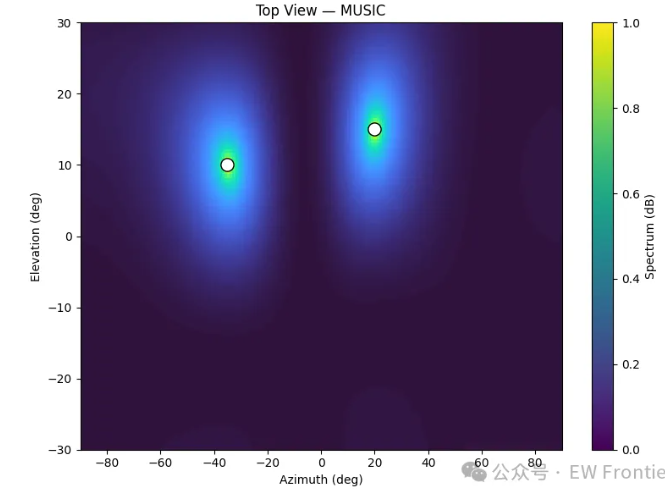
1.4 Bartlett 波束成形(常规波束成形)
Bartlett 算法是最基础的波束成形方法,本质是 “空域匹配滤波”,其谱估计公式为:
其中 Re ⋅ \text{Re}{\cdot} Re⋅表示取实部。该公式的核心逻辑是:对每个扫描角度 ( θ , ϕ ) (\theta, \phi) (θ,ϕ),计算协方差矩阵在该导向矢量上的投影,投影值越大,说明该方向存在目标的概率越高。
为了直观展示,通常将谱值归一化后转换为分贝(dB):
1.5 MUSIC 算法(超高分辨率谱估计)
Bartlett 算法的分辨率受阵列孔径限制,而 MUSIC(Multiple Signal Classification)算法基于 “信号子空间 - 噪声子空间正交性”,能突破阵列孔径限制,实现超高分辨率角度估计。
步骤 1:协方差矩阵特征分解
对协方差矩阵 R \mathbf{R} R做特征值分解:
其中 Λ = diag ( λ 1 , λ 2 , … , λ N ) \mathbf{\Lambda} = \text{diag}(\lambda_1, \lambda_2, \dots, \lambda_N) Λ=diag(λ1,λ2,…,λN)为特征值矩阵(按降序排列), V = [ v 1 , v 2 , … , v N ] \mathbf{V} = [\mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_N] V=[v1,v2,…,vN]为特征向量矩阵。
步骤 2:子空间划分
设目标数为 K K K(本文 K = 2 K=2 K=2),前 K K K个大特征值对应信号子空间( V s = [ v 1 , … , v K ] \mathbf{V}_s = [\mathbf{v}_1, \dots, \mathbf{v}_K] Vs=[v1,…,vK]),剩余 N − K N-K N−K个小特征值对应噪声子空间( V n = [ v K + 1 , … , v N ] \mathbf{V}_n = [\mathbf{v}_{K+1}, \dots, \mathbf{v}_N] Vn=[vK+1,…,vN])。
步骤 3:MUSIC 谱计算
利用信号子空间与噪声子空间的正交性,MUSIC 谱定义为:
分母越小,谱值越大,峰值位置即为目标角度。同样归一化为 dB 形式:
二、工程实现核心代码解析
2.1 系统参数配置([config.py](config.py))
核心参数集中管理,保证系统可扩展性:
import numpy as np
# 物理常数
C = 3e8 # 光速 (m/s)
FC = 77e9 # 载波频率 (77GHz,车载雷达常用)
LAMBDA = C / FC # 波长
ELEMENT_SPACING = LAMBDA / 2 # 阵元间距
# 阵列配置
NX = 4 # x方向阵元数
NY = 4 # y方向阵元数
NUM_ELEMENTS = NX * NY # 总阵元数
# 仿真参数
NUM_SNAPSHOTS = 300 # 快拍数
SNR_DB = 20 # 信噪比 (dB)
NUM_TARGETS = 2 # 目标数
# 目标真实角度(方位角,仰角),单位:度
TARGETS = [(20, 15), (-35, 10)]
# 扫描网格
AZIMUTH_SCAN = np.linspace(-90, 90, 181) # 方位角扫描范围:-90~90度,步长1度
ELEVATION_SCAN = np.linspace(-30, 30, 121) # 仰角扫描范围:-30~30度,步长0.5度
2.2 导向矢量计算(signal\[_simulator.py](_simulator.py))
将理论公式转化为工程代码,注意角度单位转换(度→弧度):
def steering_vector(theta_deg, phi_deg, array_positions):
"""
计算给定方位角、仰角的导向矢量
参数:
theta_deg: 方位角(度)
phi_deg: 仰角(度)
array_positions: 阵列位置矩阵 (2×N)
返回:
a: 导向矢量 (N×1)
"""
theta = np.deg2rad(theta_deg)
phi = np.deg2rad(phi_deg)
# 波数在x、y方向的分量
kx = (2 * np.pi / LAMBDA) * np.cos(phi) * np.sin(theta)
ky = (2 * np.pi / LAMBDA) * np.sin(phi)
# 计算每个阵元的相位
phase = kx * array_positions[0] + ky * array_positions[1]
return np.exp(1j * phase)
2.3 Bartlett 谱计算([beamformer.py](beamformer.py))
严格遵循 Bartlett 公式,遍历所有扫描角度计算谱值:
def compute_bartlett_spectrum(R):
"""
计算Bartlett波束成形谱
参数:
R: 协方差矩阵 (N×N)
返回:
P_bartlett: 2D谱矩阵 (仰角数×方位角数)
"""
array_positions = generate_array_positions()
P_bartlett = np.zeros((len(ELEVATION_SCAN), len(AZIMUTH_SCAN)))
# 遍历所有扫描角度
for i, phi in enumerate(ELEVATION_SCAN):
for j, theta in enumerate(AZIMUTH_SCAN):
a = steering_vector(theta, phi, array_positions)
# Bartlett核心公式
P_bartlett[i, j] = np.real(a.conj().T @ R @ a)
# 归一化并转换为dB
P_bartlett = 10 * np.log10(P_bartlett / np.max(P_bartlett))
return P_bartlett
2.4 MUSIC 谱计算(music\[_2d.py](_2d.py))
核心是特征分解与子空间划分,实现超高分辨率谱估计:
def compute_music_spectrum(R):
# 协方差矩阵特征分解
eigvals, eigvecs = eig(R)
# 特征值降序排序
idx = eigvals.argsort()[::-1]
eigvals = eigvals[idx]
eigvecs = eigvecs[:, idx]
# 划分噪声子空间(取后N-K个特征向量)
En = eigvecs[:, NUM_TARGETS:]
array_positions = generate_array_positions()
P_music = np.zeros((len(ELEVATION_SCAN), len(AZIMUTH_SCAN)))
# 遍历扫描角度计算MUSIC谱
for i, phi in enumerate(ELEVATION_SCAN):
for j, theta in enumerate(AZIMUTH_SCAN):
a = steering_vector(theta, phi, array_positions)
# MUSIC核心公式
denom = a.conj().T @ En @ En.conj().T @ a
P_music[i, j] = 1 / np.abs(denom)
# 归一化并转换为dB
P_music = 10 * np.log10(P_music / np.max(P_music))
return P_music, eigvals
2.5 主流程([main.py](main.py))
串联整个系统:信号仿真→协方差计算→谱估计→峰值检测→可视化:
from signal_simulator import simulate_received_signal
from covariance import compute_covariance
from music_2d import compute_music_spectrum
from beamformer import compute_bartlett_spectrum
from peak_detection import estimate_angles
from visualization import plot_all
def main():
print("Running 3D MIMO Beamforming Simulation...")
# 1. 仿真接收信号
X = simulate_received_signal()
# 2. 计算协方差矩阵
R = compute_covariance(X)
# 3. 计算MUSIC谱和特征值
P_music, eigvals = compute_music_spectrum(R)
# 4. 计算Bartlett谱
P_bartlett = compute_bartlett_spectrum(R)
# 5. 峰值检测估计目标角度
estimated_angles = estimate_angles(P_music)
print("\nEstimated Angles (Azimuth, Elevation):")
for angle in estimated_angles:
print(angle)
# 6. 结果可视化
plot_all(P_music, P_bartlett, eigvals, estimated_angles)
if __name__ == "__main__":
main()
三、结果分析与工程启示
3.1 算法性能对比
-
Bartlett 算法:实现简单、计算量小,但分辨率低 —— 当两个目标角度接近时,无法区分;
-
MUSIC 算法:分辨率远超 Bartlett,能精准捕捉目标的真实角度,但依赖准确的目标数估计,且计算量更大(特征分解 + 双重循环扫描)。
3.2 工程优化方向
-
计算效率:MUSIC 算法的双重循环(方位角 × 仰角)可通过向量化、GPU 加速优化;
-
鲁棒性:实际场景中协方差矩阵存在误差,可引入正则化、平滑处理提升稳定性;
-
实时性:车载雷达等场景需降低扫描点数(如方位角步长改为 2 度),平衡分辨率与实时性。
3.3 可视化结果解读
通过 3D 曲面图可直观对比 Bartlett 与 MUSIC 的谱分布:
-
Bartlett 谱的峰值较宽,目标角度模糊;
-
MUSIC 谱的峰值尖锐,能精准定位目标((20°,15°) 和 (-35°,10°));
-
特征值谱可清晰区分信号子空间(前 2 个大特征值)和噪声子空间(剩余小特征值),验证了 MUSIC 算法的理论基础。
四、总结
3D MIMO 波束成形是空间信号处理的核心技术,Bartlett 算法作为基础方法,是理解空域滤波的关键;MUSIC 算法则通过子空间正交性突破了分辨率限制,是高精度定位的主流选择。本文从理论公式到工程代码,完整实现了 3D 波束成形系统,核心是将 “导向矢量”“协方差矩阵”“子空间分解” 等理论概念转化为可落地的代码逻辑。
在实际工程中,需结合场景需求选择算法:追求实时性选 Bartlett,追求高精度选 MUSIC;同时需考虑阵列设计、快拍数、信噪比等因素对性能的影响。后续可进一步探索 ESPRIT、Root-MUSIC 等无扫描算法,进一步提升计算效率与分辨率。
附:完整代码已梳理各模块逻辑,可直接运行,适用于雷达、通信等领域的 3D 波束成形仿真,也可作为高校《阵列信号处理》课程的实践案例。
更多推荐
 3
3 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)