
强化学习与SERL系列深度解析:从理论到实践的全面探索
强化学习作为人工智能领域的重要分支,近年来在机器人操作、游戏AI、自动驾驶等领域取得了突破性进展。特别是在机器人操作领域,从传统的仿真训练到真实世界的直接学习,强化学习技术正在经历着革命性的变革。本文将从基础理论出发,深入探讨强化学习的最新发展,特别是SERL系列框架在真实世界机器人操作中的应用。在现实世界里,要实现高性能的操作并达到高可靠性,对于每一个环境来说,最通用、最具扩展性的办法必然是强化
0. 前言
强化学习作为人工智能领域的重要分支,近年来在机器人操作、游戏AI、自动驾驶等领域取得了突破性进展。特别是在机器人操作领域,从传统的仿真训练到真实世界的直接学习,强化学习技术正在经历着革命性的变革。本文将从基础理论出发,深入探讨强化学习的最新发展,特别是SERL系列框架在真实世界机器人操作中的应用。
在现实世界里,要实现高性能的操作并达到高可靠性,对于每一个环境来说,最通用、最具扩展性的办法必然是强化学习。而且它并非是一种被动的数据学习,不是简单地去收集一些离线数据就可以了。如果想要达到100%的可靠性,那就一定要与环境进行交互,而要实现与环境交互,就必须得运用强化学习。
那真机强化学习有什么好处呢?基于生存在物理世界中要比创建一个物理世界更容易的观点。其实我们所处的世界本身就是world model,直接依赖这个world model开始强化学习,绕过仿真sim2real gap和各种物理属性难以仿真等问题。
1. 引言
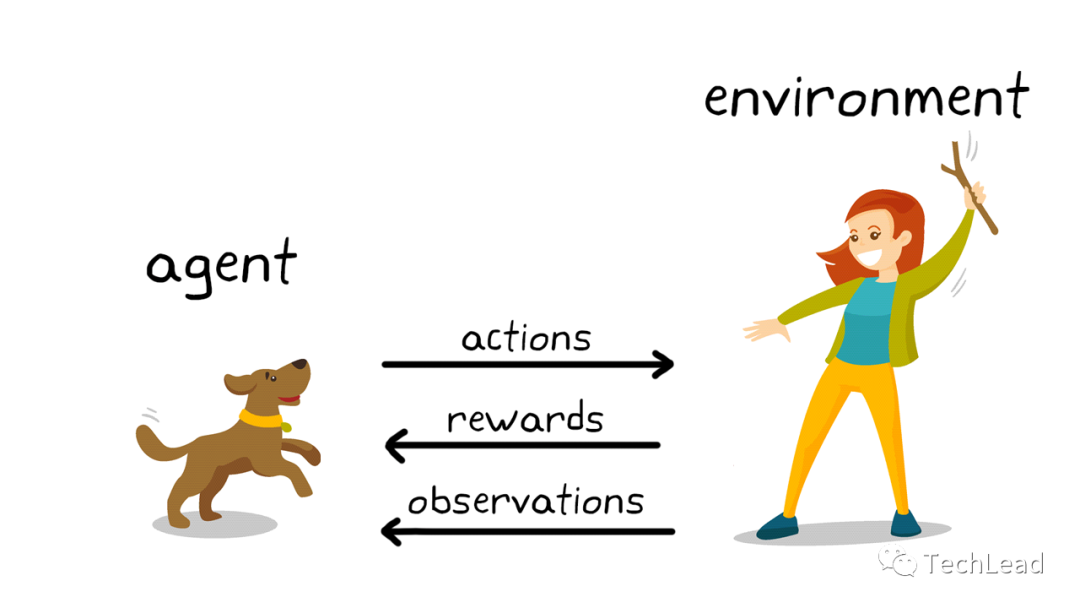
强化学习(Reinforcement Learning, RL)是人工智能(AI)和机器学习(ML)领域的一个重要子领域,与监督学习和无监督学习并列。它模仿了生物体通过与环境交互来学习最优行为的过程。与传统的监督学习不同,强化学习没有事先标记好的数据集来训练模型。相反,它依靠智能体(Agent)通过不断尝试、失败、适应和优化来学习如何在给定环境中实现特定目标。
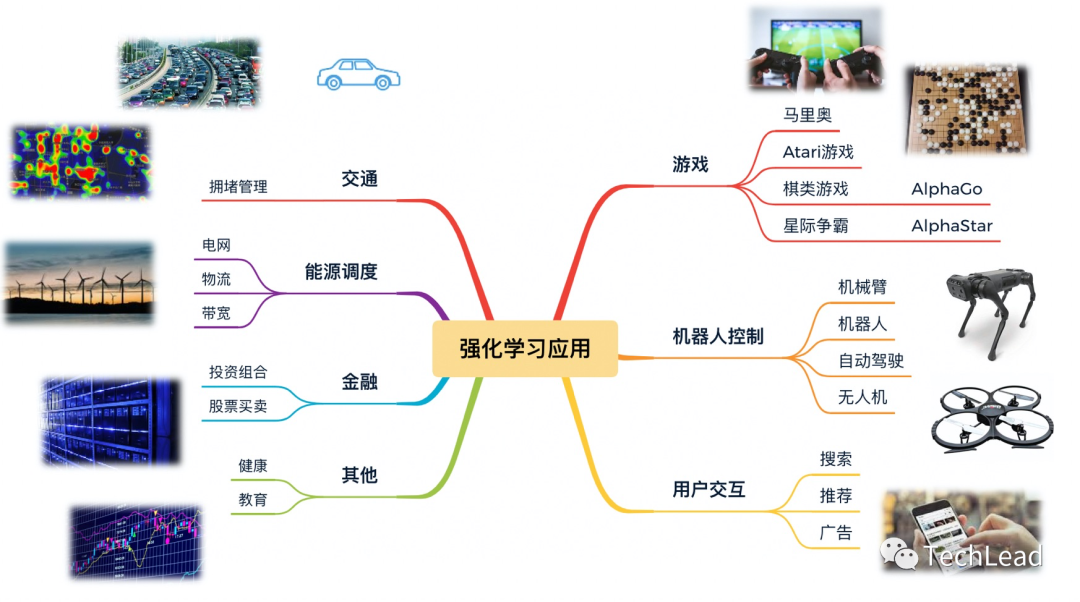
强化学习的核心思想来源于心理学中的行为主义理论,即智能体通过试错过程学习最优行为策略。这种学习方式特别适合于解决序列决策问题,其中每个决策都会影响未来的状态和奖励。在机器人操作、游戏AI、金融交易、资源调度等复杂决策场景中,强化学习展现出了强大的学习能力和适应性。
1.1 强化学习的核心组成
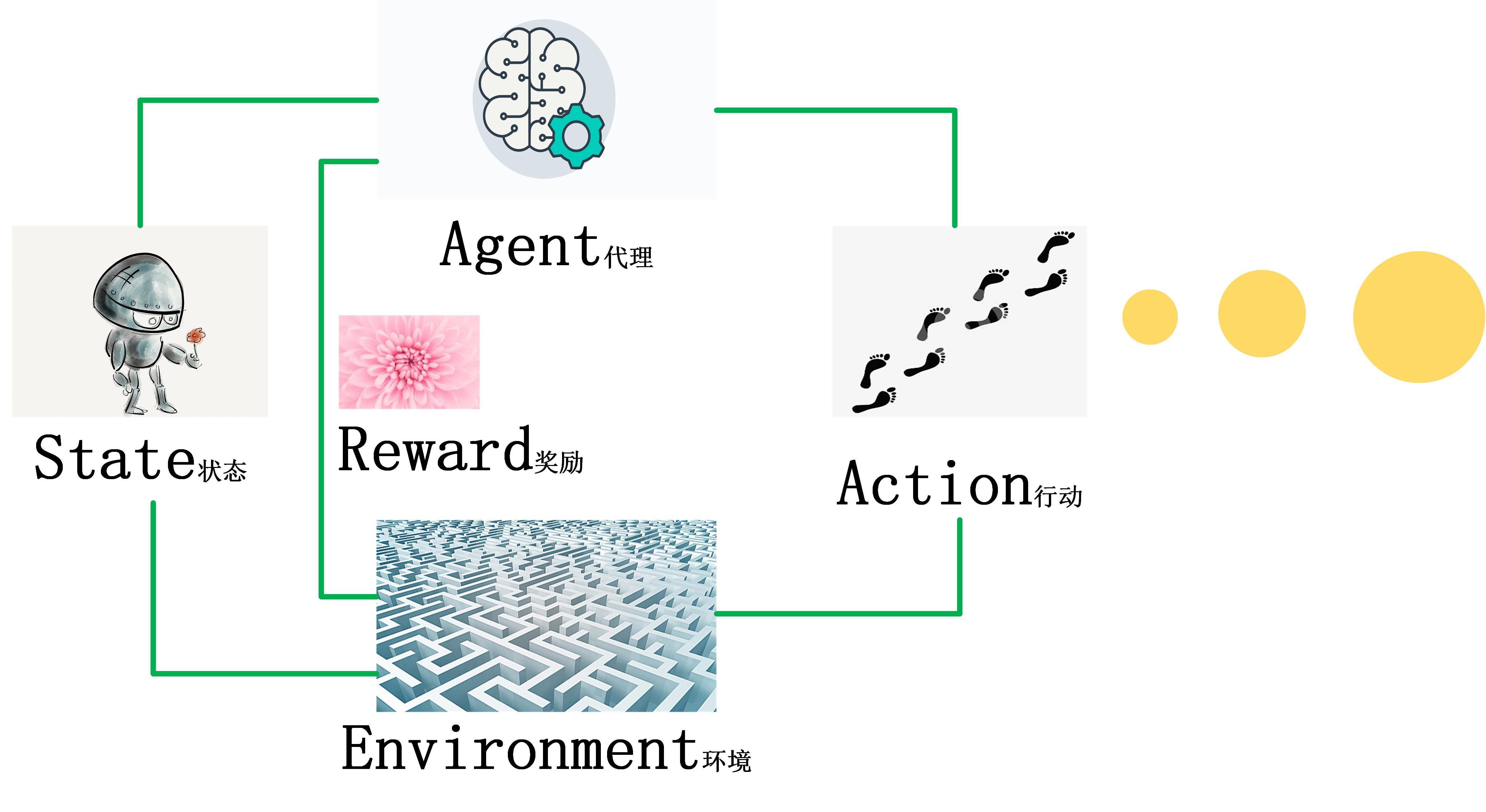
强化学习的框架主要由以下几个核心组成:
- 状态(State):反映环境或系统当前的情况。
- 动作(Action):智能体在特定状态下可以采取的操作。
- 奖励(Reward):一个数值反馈,用于量化智能体采取某一动作后环境的反应。
- 策略(Policy):一个映射函数,指导智能体在特定状态下应采取哪一动作。
这四个元素共同构成了马尔可夫决策过程(Markov Decision Process, MDP),这是强化学习最核心的数学模型。
2. 强化学习基础
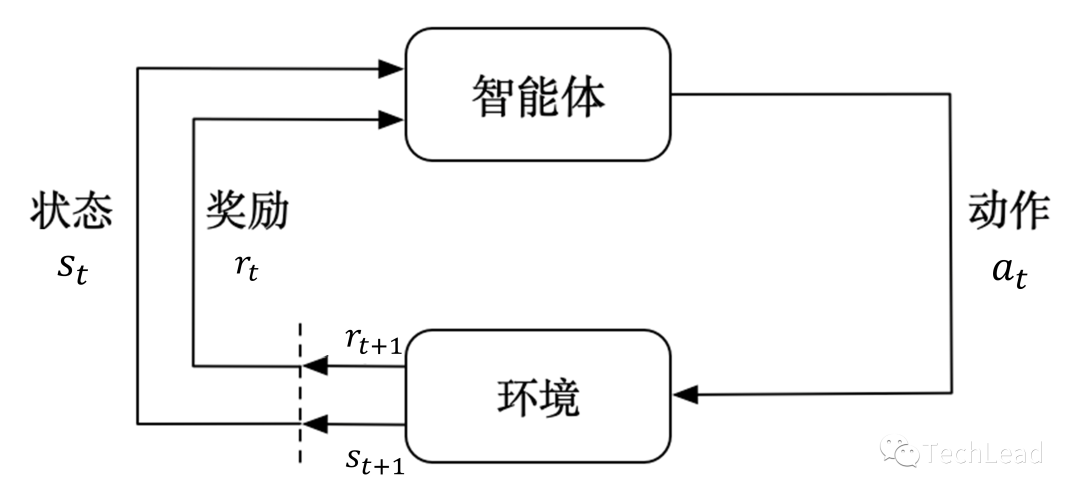
强化学习的核心是建模决策问题,并通过与环境的交互来学习最佳决策方案。这一过程常常是通过马尔可夫决策过程(Markov Decision Process, MDP)来描述和解决的。在本节中,我们将详细地探讨马尔可夫决策过程以及其核心组件:奖励、状态、动作和策略。
2.1 马尔可夫决策过程(MDP)
MDP是用来描述决策问题的数学模型,主要由一个五元组 (S, A, P, R, γ) 组成。
- 状态空间(S):表示所有可能状态的集合。在机器人操作中,状态可能包括机器人的关节角度、末端执行器位置、视觉观测等信息。
- 动作空间(A):表示在特定状态下可能采取的所有动作的集合。对于机械臂,动作通常是关节角度或末端执行器的位移。
- 状态转移概率(P):P(s’|s, a) 表示在状态 s 下采取动作 a 转移到状态 s’ 的概率。这个概率函数描述了环境的动态特性。
- 奖励函数(R):R(s, a) 表示在状态 s 下采取动作 a 后获得的即时奖励。奖励函数的设计对强化学习的效果至关重要。
- 折扣因子(γ):用于权衡当前奖励与未来奖励的重要性,取值范围为 [0,1]。γ接近1时更重视长期奖励,接近0时更重视即时奖励。
2.1.1 MDP的数学表示
强化学习的目标是找到一个最优策略π*,使得期望累积奖励最大化:
J ( π ) = E τ ∼ π [ ∑ t = 0 T γ t R ( s t , a t ) ] J(\pi) = \mathbb{E}_{\tau \sim \pi} \left[ \sum_{t=0}^{T} \gamma^t R(s_t, a_t) \right] J(π)=Eτ∼π[t=0∑TγtR(st,at)]
其中τ表示轨迹,T是时间步长。最优策略满足:
π ∗ = arg max π J ( π ) \pi^* = \arg\max_{\pi} J(\pi) π∗=argπmaxJ(π)
2.1.2 状态(State)
在MDP中,状态是用来描述环境或问题的现状。在不同应用中,状态可以有很多种表现形式:
- 在棋类游戏中,状态通常表示棋盘上各个棋子的位置。
- 在自动驾驶中,状态可能包括车辆的速度、位置、以及周围对象的状态等。
2.1.3 动作(Action)
动作是智能体(Agent)在某一状态下可以采取的操作。动作会影响环境,并可能导致状态的转变。
- 在股市交易中,动作通常是"买入"、“卖出"或"持有”。
- 在游戏如"超级马里奥"中,动作可能包括"跳跃"、"下蹲"或"向前移动"等。
2.1.4 奖励(Reward)
奖励是一个数值反馈,用于评估智能体采取某一动作的"好坏"。通常,智能体的目标是最大化累积奖励。
- 在迷宫问题中,到达目的地可能会得到正奖励,而撞到墙壁则可能会得到负奖励。
2.1.5 策略(Policy)
策略是一个从状态到动作的映射函数,用于指导智能体在每一状态下应采取哪一动作。形式上,策略通常表示为 π(a|s),代表在状态 s 下采取动作 a 的概率。
- 在游戏如"五子棋"中,策略可能是一个复杂的神经网络,用于评估每一步棋的优劣。
通过优化策略,我们可以使智能体在与环境的交互中获得更高的累积奖励,从而实现更优的性能。
3. 常用强化学习算法
强化学习拥有多种算法,用于解决不同类型的问题。在本节中,我们将探讨几种常用的强化学习算法,包括他们的工作原理、意义以及应用实例。这些算法构成了强化学习领域的核心工具箱,每种算法都有其独特的优势和适用场景。
3.1 值迭代(Value Iteration)
3.1.1 算法描述
值迭代是一种基于动态规划(Dynamic Programming)的方法,用于计算最优策略。主要思想是通过迭代更新状态值函数(Value Function)来找到最优策略。该算法通过不断改进对每个状态价值的估计,最终收敛到最优值函数。
值迭代的核心更新公式为:
V k + 1 ( s ) = max a ∑ s ′ P ( s ′ ∣ s , a ) [ R ( s , a , s ′ ) + γ V k ( s ′ ) ] V_{k+1}(s) = \max_a \sum_{s'} P(s'|s,a)[R(s,a,s') + \gamma V_k(s')] Vk+1(s)=amaxs′∑P(s′∣s,a)[R(s,a,s′)+γVk(s′)]
其中:
- V k ( s ) V_k(s) Vk(s) 是第k次迭代时状态s的值函数
- P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a) 是状态转移概率
- R ( s , a , s ′ ) R(s,a,s') R(s,a,s′) 是奖励函数
- γ \gamma γ 是折扣因子
3.1.2 算法意义
值迭代算法主要用于解决具有完全可观测状态和已知转移概率的MDP问题。它是一种"模型已知"的算法,要求智能体完全了解环境的动态特性。这种算法具有理论保证,能够收敛到最优策略,但计算复杂度较高。
3.1.3 应用实例
值迭代经常用于路径规划、游戏(如迷宫问题)等环境中,其中所有状态和转移概率都是已知的。在机器人导航中,值迭代可以帮助机器人找到从起点到终点的最优路径。
import numpy as np
def value_iteration(env, gamma=0.9, theta=1e-6):
"""
值迭代算法实现
"""
V = np.zeros(env.nS) # 初始化值函数
while True:
delta = 0
for s in range(env.nS):
v = V[s]
# 计算所有可能动作的值
action_values = []
for a in range(env.nA):
action_value = 0
for prob, next_state, reward, done in env.P[s][a]:
action_value += prob * (reward + gamma * V[next_state])
action_values.append(action_value)
V[s] = max(action_values) # 选择最大价值
delta = max(delta, abs(v - V[s]))
if delta < theta:
break
# 提取最优策略
policy = np.zeros([env.nS, env.nA])
for s in range(env.nS):
action_values = []
for a in range(env.nA):
action_value = 0
for prob, next_state, reward, done in env.P[s][a]:
action_value += prob * (reward + gamma * V[next_state])
action_values.append(action_value)
best_action = np.argmax(action_values)
policy[s, best_action] = 1.0
return policy, V
3.2 Q学习(Q-Learning)
3.2.1 算法描述
Q学习是一种基于值函数的"模型无知"算法。它通过更新Q值(状态-动作值函数)来找到最优策略。Q学习是强化学习中最经典的算法之一,具有简单、有效、收敛性好的特点。
Q学习的核心更新公式为:
Q ( s , a ) ← Q ( s , a ) + α [ r + γ max a ′ Q ( s ′ , a ′ ) − Q ( s , a ) ] Q(s,a) \leftarrow Q(s,a) + \alpha[r + \gamma \max_{a'} Q(s',a') - Q(s,a)] Q(s,a)←Q(s,a)+α[r+γa′maxQ(s′,a′)−Q(s,a)]
其中:
- Q ( s , a ) Q(s,a) Q(s,a) 是状态-动作值函数
- α \alpha α 是学习率
- r r r 是即时奖励
- γ \gamma γ 是折扣因子
- s ′ s' s′ 是下一个状态
3.2.2 算法意义
Q学习算法适用于"模型无知"的场景,也就是说,智能体并不需要知道环境的完整信息。因此,Q学习特别适用于现实世界的问题。该算法具有以下优势:
- 无模型学习:不需要环境模型,只需要与环境交互
- 在线学习:可以在与环境交互的过程中实时学习
- 收敛保证:在满足一定条件下,Q学习能够收敛到最优策略
- 简单实现:算法逻辑简单,易于实现和调试
3.2.3 应用实例
Q学习广泛用于机器人导航、电子商务推荐系统以及多玩家游戏等。在机器人导航中,Q学习可以帮助机器人学习在不同环境下选择最优的移动策略。
import numpy as np
import random
class QLearning:
def __init__(self, state_size, action_size, learning_rate=0.1,
discount_factor=0.95, epsilon=0.1):
self.state_size = state_size
self.action_size = action_size
self.learning_rate = learning_rate
self.discount_factor = discount_factor
self.epsilon = epsilon
# 初始化Q表
self.q_table = np.zeros((state_size, action_size))
def choose_action(self, state, training=True):
"""
选择动作:epsilon-贪婪策略
"""
if training and random.random() < self.epsilon:
return random.choice(range(self.action_size))
else:
return np.argmax(self.q_table[state])
def update(self, state, action, reward, next_state, done):
"""
更新Q值
"""
current_q = self.q_table[state, action]
if done:
target_q = reward
else:
target_q = reward + self.discount_factor * np.max(self.q_table[next_state])
self.q_table[state, action] += self.learning_rate * (target_q - current_q)
def decay_epsilon(self, decay_rate=0.995):
"""
衰减探索率
"""
self.epsilon = max(0.01, self.epsilon * decay_rate)
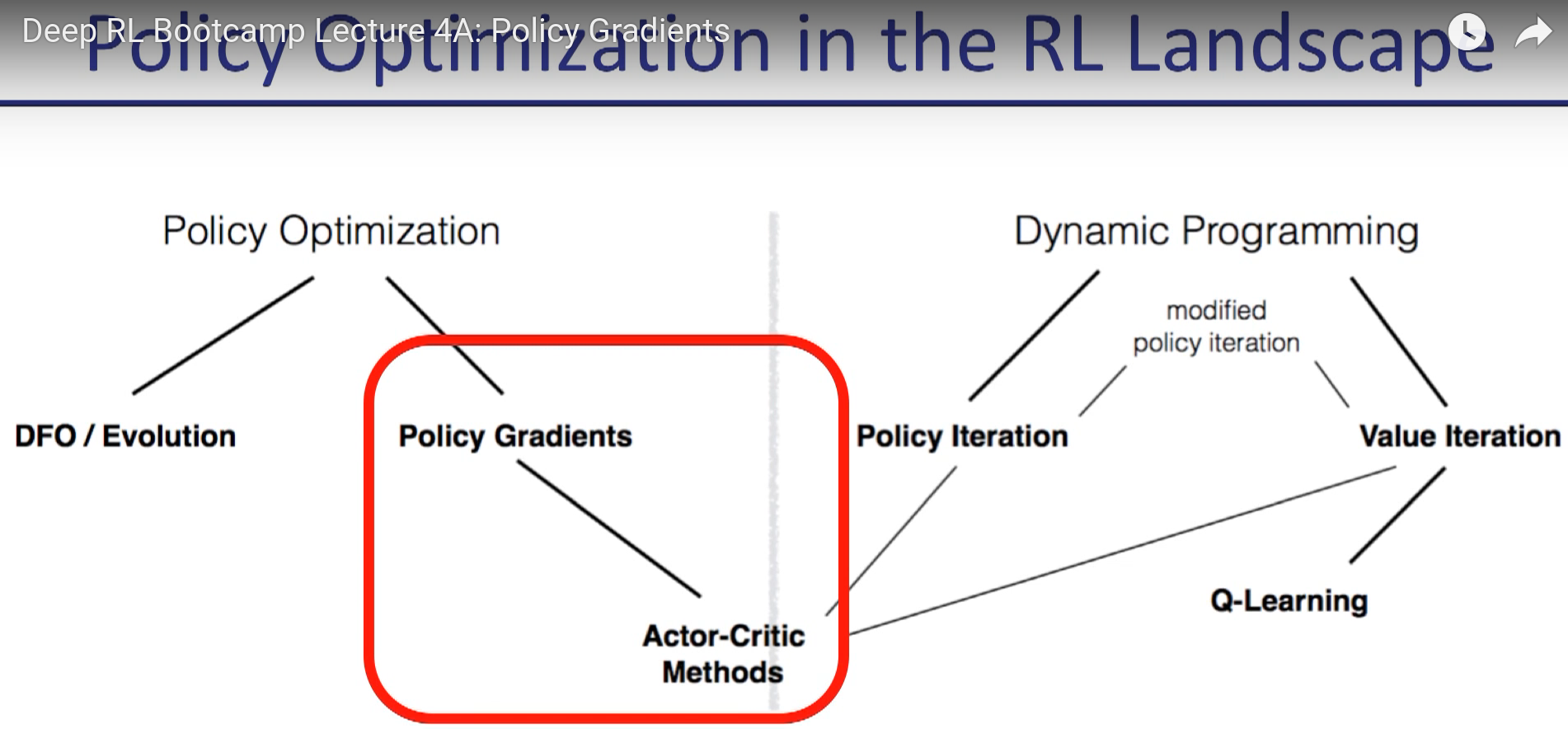
3.3 策略梯度(Policy Gradients)
3.3.1 算法描述
与基于值函数的方法不同,策略梯度方法直接在策略空间中进行优化。算法通过计算梯度来更新策略参数。策略梯度方法的核心思想是直接优化策略函数,而不是通过值函数间接优化。
策略梯度的核心公式为:
∇ θ J ( θ ) = E τ ∼ π θ [ ∑ t = 0 T ∇ θ log π θ ( a t ∣ s t ) A t ] \nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{T} \nabla_\theta \log \pi_\theta(a_t|s_t) A_t \right] ∇θJ(θ)=Eτ∼πθ[t=0∑T∇θlogπθ(at∣st)At]
其中:
- J ( θ ) J(\theta) J(θ) 是策略的目标函数
- π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st) 是策略函数
- A t A_t At 是优势函数
- τ \tau τ 是轨迹
3.3.2 算法意义
策略梯度方法特别适用于处理高维或连续的动作和状态空间,而这些在基于值的方法中通常很难处理。该方法的优势包括:
- 连续动作空间:能够处理连续的动作空间,如机器人控制
- 随机策略:可以学习随机策略,增加探索性
- 端到端学习:直接从状态到动作的映射,无需中间值函数
- 理论保证:具有收敛性理论保证
3.3.3 应用实例
策略梯度方法在自然语言处理(如机器翻译)、连续控制问题(如机器人手臂控制)等方面有广泛应用。在机器人控制中,策略梯度可以帮助机器人学习复杂的运动技能。
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.distributions import Categorical
class PolicyNetwork(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=128):
super(PolicyNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, hidden_dim)
self.fc3 = nn.Linear(hidden_dim, action_dim)
def forward(self, state):
x = F.relu(self.fc1(state))
x = F.relu(self.fc2(x))
action_probs = F.softmax(self.fc3(x), dim=-1)
return action_probs
class PolicyGradient:
def __init__(self, state_dim, action_dim, learning_rate=1e-3):
self.policy_net = PolicyNetwork(state_dim, action_dim)
self.optimizer = optim.Adam(self.policy_net.parameters(), lr=learning_rate)
def select_action(self, state):
"""
选择动作
"""
state = torch.FloatTensor(state).unsqueeze(0)
action_probs = self.policy_net(state)
dist = Categorical(action_probs)
action = dist.sample()
log_prob = dist.log_prob(action)
return action.item(), log_prob
def update_policy(self, rewards, log_probs):
"""
更新策略
"""
# 计算折扣奖励
discounted_rewards = []
running_reward = 0
for reward in reversed(rewards):
running_reward = reward + 0.99 * running_reward
discounted_rewards.insert(0, running_reward)
# 标准化奖励
discounted_rewards = torch.FloatTensor(discounted_rewards)
discounted_rewards = (discounted_rewards - discounted_rewards.mean()) / (discounted_rewards.std() + 1e-8)
# 计算策略损失
policy_loss = []
for log_prob, reward in zip(log_probs, discounted_rewards):
policy_loss.append(-log_prob * reward)
# 更新网络
self.optimizer.zero_grad()
policy_loss = torch.cat(policy_loss).sum()
policy_loss.backward()
self.optimizer.step()
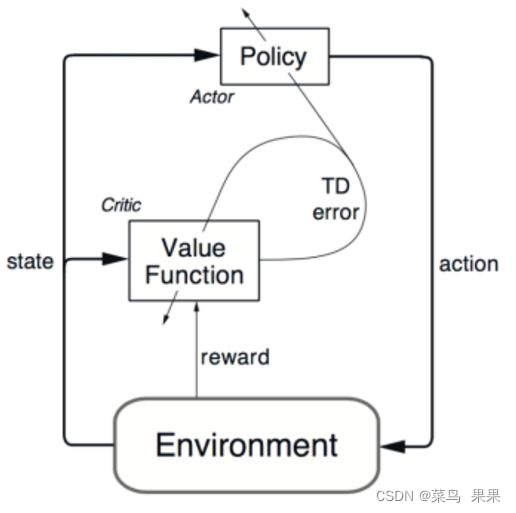
3.4 演员-评论家(Actor-Critic)
3.4.1 算法描述
Actor-Critic 结合了值函数方法和策略梯度方法的优点。其中,“Actor” 负责决策,“Critic” 负责评价这些决策。这种架构能够同时学习策略和价值函数,实现更稳定和高效的学习。
Actor-Critic的核心思想是:
- Actor(演员):学习策略函数 π ( a ∣ s ) \pi(a|s) π(a∣s),负责选择动作
- Critic(评论家):学习价值函数 V ( s ) V(s) V(s) 或 Q ( s , a ) Q(s,a) Q(s,a),负责评估状态或动作的价值
Actor-Critic的更新公式为:
θ t + 1 = θ t + α ∇ θ log π θ ( a t ∣ s t ) A t \theta_{t+1} = \theta_t + \alpha \nabla_\theta \log \pi_\theta(a_t|s_t) A_t θt+1=θt+α∇θlogπθ(at∣st)At
w t + 1 = w t + β ∇ w ( R t + 1 + γ V w ( s t + 1 ) − V w ( s t ) ) ∇ w V w ( s t ) w_{t+1} = w_t + \beta \nabla_w (R_{t+1} + \gamma V_w(s_{t+1}) - V_w(s_t)) \nabla_w V_w(s_t) wt+1=wt+β∇w(Rt+1+γVw(st+1)−Vw(st))∇wVw(st)
其中:
- θ \theta θ 是Actor的参数
- w w w 是Critic的参数
- A t A_t At 是优势函数
- α , β \alpha, \beta α,β 是学习率
3.4.2 算法意义
通过结合值函数和策略优化,Actor-Critic 能在各种不同的环境中实现更快和更稳定的学习。该方法的优势包括:
- 稳定性:Critic提供稳定的价值估计,减少策略梯度的方差
- 效率:同时学习策略和价值函数,提高学习效率
- 在线学习:可以在线更新,无需等待回合结束
- 灵活性:可以处理连续和离散动作空间
3.4.3 应用实例
在自动驾驶、资源分配和多智能体系统等复杂问题中,Actor-Critic 方法被广泛应用。在自动驾驶中,Actor负责控制车辆,Critic负责评估驾驶行为的安全性。
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
class ActorCritic(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=128):
super(ActorCritic, self).__init__()
# Actor网络
self.actor = nn.Sequential(
nn.Linear(state_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, action_dim),
nn.Softmax(dim=-1)
)
# Critic网络
self.critic = nn.Sequential(
nn.Linear(state_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 1)
)
def forward(self, state):
action_probs = self.actor(state)
state_value = self.critic(state)
return action_probs, state_value
class ActorCriticAgent:
def __init__(self, state_dim, action_dim, lr_actor=1e-3, lr_critic=1e-3):
self.device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
self.model = ActorCritic(state_dim, action_dim).to(self.device)
self.actor_optimizer = optim.Adam(self.model.actor.parameters(), lr=lr_actor)
self.critic_optimizer = optim.Adam(self.model.critic.parameters(), lr=lr_critic)
def select_action(self, state):
"""
选择动作
"""
state = torch.FloatTensor(state).unsqueeze(0).to(self.device)
action_probs, state_value = self.model(state)
dist = torch.distributions.Categorical(action_probs)
action = dist.sample()
log_prob = dist.log_prob(action)
return action.item(), log_prob, state_value
def update(self, states, actions, rewards, next_states, dones, log_probs, state_values):
"""
更新Actor和Critic
"""
states = torch.FloatTensor(states).to(self.device)
actions = torch.LongTensor(actions).to(self.device)
rewards = torch.FloatTensor(rewards).to(self.device)
next_states = torch.FloatTensor(next_states).to(self.device)
dones = torch.BoolTensor(dones).to(self.device)
log_probs = torch.stack(log_probs).to(self.device)
state_values = torch.stack(state_values).squeeze().to(self.device)
# 计算目标价值
with torch.no_grad():
_, next_state_values = self.model(next_states)
targets = rewards + 0.99 * next_state_values.squeeze() * (~dones)
# 计算优势
advantages = targets - state_values
# 更新Critic
critic_loss = F.mse_loss(state_values, targets)
self.critic_optimizer.zero_grad()
critic_loss.backward(retain_graph=True)
self.critic_optimizer.step()
# 更新Actor
actor_loss = -(log_probs * advantages.detach()).mean()
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
3.5 PPO(Proximal Policy Optimization)算法
PPO是一种高效、可靠的强化学习算法,属于策略梯度家族的一部分。由于其高效和稳定的性质,PPO算法在各种强化学习任务中都有广泛的应用。PPO算法通过限制策略更新的幅度,避免了传统策略梯度方法中可能出现的性能崩溃问题。
3.5.1 原理
PPO的核心思想是通过限制策略更新的步长来避免太大的性能下降。这是通过引入一种特殊的目标函数实现的,该目标函数包含一个剪辑(Clipping)项来限制策略的改变程度。
PPO的目标函数为:
L C L I P ( θ ) = E t [ min ( r t ( θ ) A t , clip ( r t ( θ ) , 1 − ϵ , 1 + ϵ ) A t ) ] L^{CLIP}(\theta) = \mathbb{E}_t \left[ \min(r_t(\theta) A_t, \text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) A_t) \right] LCLIP(θ)=Et[min(rt(θ)At,clip(rt(θ),1−ϵ,1+ϵ)At)]
其中:
- r t ( θ ) = π θ ( a t ∣ s t ) π θ o l d ( a t ∣ s t ) r_t(\theta) = \frac{\pi_\theta(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)} rt(θ)=πθold(at∣st)πθ(at∣st) 是概率比率
- A t A_t At 是优势函数
- ϵ \epsilon ϵ 是剪辑参数(通常为0.2)

PPO算法的关键创新在于:
- 概率比率裁剪:限制新旧策略之间的差异,防止策略更新过大
- 保守更新:当优势为正时,限制策略改进的上限;当优势为负时,限制策略恶化的下限
- 多次更新:对同一批数据可以进行多次更新,提高样本效率
3.5.2 算法细节
PPO算法的实现细节包括:
- 多步优势估计:PPO通常与多步回报(Multi-Step Return)和优势函数(Advantage Function)结合使用,以减少估计误差。优势函数通过GAE(Generalized Advantage Estimation)计算,能够有效减少方差。
- 自适应学习率:PPO通常使用自适应学习率和高级优化器(如Adam),能够自动调整学习步长,提高训练稳定性。
- 并行采样:由于PPO是一种"样本高效"的算法,通常与并行环境采样结合使用,以进一步提高效率。多个环境同时运行可以快速收集大量经验数据。
3.5.3 代码举例
下面是使用Python和PyTorch实现PPO的完整示例:
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.distributions import Categorical
import numpy as np
class PPONetwork(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=128):
super(PPONetwork, self).__init__()
# 共享特征提取层
self.shared_layers = nn.Sequential(
nn.Linear(state_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU()
)
# Actor头:输出动作概率
self.actor = nn.Linear(hidden_dim, action_dim)
# Critic头:输出状态价值
self.critic = nn.Linear(hidden_dim, 1)
def forward(self, state):
features = self.shared_layers(state)
action_probs = F.softmax(self.actor(features), dim=-1)
state_value = self.critic(features)
return action_probs, state_value
class PPOAgent:
def __init__(self, state_dim, action_dim, lr=3e-4, gamma=0.99,
eps_clip=0.2, k_epochs=4, entropy_coef=0.01):
self.gamma = gamma
self.eps_clip = eps_clip
self.k_epochs = k_epochs
self.entropy_coef = entropy_coef
self.device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
self.policy = PPONetwork(state_dim, action_dim).to(self.device)
self.optimizer = optim.Adam(self.policy.parameters(), lr=lr)
self.old_policy = PPONetwork(state_dim, action_dim).to(self.device)
self.old_policy.load_state_dict(self.policy.state_dict())
def select_action(self, state):
"""
选择动作
"""
state = torch.FloatTensor(state).unsqueeze(0).to(self.device)
with torch.no_grad():
action_probs, state_value = self.old_policy(state)
dist = Categorical(action_probs)
action = dist.sample()
log_prob = dist.log_prob(action)
return action.item(), log_prob.cpu().numpy(), state_value.cpu().numpy()
def update(self, states, actions, rewards, next_states, dones,
old_log_probs, old_state_values):
"""
更新策略
"""
# 转换为张量
states = torch.FloatTensor(states).to(self.device)
actions = torch.LongTensor(actions).to(self.device)
rewards = torch.FloatTensor(rewards).to(self.device)
next_states = torch.FloatTensor(next_states).to(self.device)
dones = torch.BoolTensor(dones).to(self.device)
old_log_probs = torch.FloatTensor(old_log_probs).to(self.device)
old_state_values = torch.FloatTensor(old_state_values).to(self.device)
# 计算折扣奖励和优势
returns = []
advantages = []
running_return = 0
running_advantage = 0
for t in reversed(range(len(rewards))):
if dones[t]:
running_return = 0
running_advantage = 0
running_return = rewards[t] + self.gamma * running_return
returns.insert(0, running_return)
td_error = rewards[t] + self.gamma * old_state_values[t+1] * (1 - dones[t]) - old_state_values[t]
running_advantage = td_error + self.gamma * 0.95 * running_advantage * (1 - dones[t])
advantages.insert(0, running_advantage)
returns = torch.FloatTensor(returns).to(self.device)
advantages = torch.FloatTensor(advantages).to(self.device)
advantages = (advantages - advantages.mean()) / (advantages.std() + 1e-8)
# 多次更新
for _ in range(self.k_epochs):
# 获取当前策略的输出
action_probs, state_values = self.policy(states)
dist = Categorical(action_probs)
log_probs = dist.log_prob(actions)
entropy = dist.entropy().mean()
# 计算概率比率
ratio = torch.exp(log_probs - old_log_probs)
# 计算PPO损失
surr1 = ratio * advantages
surr2 = torch.clamp(ratio, 1 - self.eps_clip, 1 + self.eps_clip) * advantages
actor_loss = -torch.min(surr1, surr2).mean()
# 计算Critic损失
critic_loss = F.mse_loss(state_values.squeeze(), returns)
# 总损失
total_loss = actor_loss + 0.5 * critic_loss - self.entropy_coef * entropy
# 更新网络
self.optimizer.zero_grad()
total_loss.backward()
torch.nn.utils.clip_grad_norm_(self.policy.parameters(), 0.5)
self.optimizer.step()
# 更新旧策略
self.old_policy.load_state_dict(self.policy.state_dict())
# 使用示例
def train_ppo_agent(env, agent, num_episodes=1000):
"""
训练PPO智能体
"""
for episode in range(num_episodes):
state = env.reset()
episode_reward = 0
states, actions, rewards, next_states, dones = [], [], [], [], []
old_log_probs, old_state_values = [], []
for step in range(1000): # 假设最大步数为1000
action, log_prob, state_value = agent.select_action(state)
next_state, reward, done, _ = env.step(action)
states.append(state)
actions.append(action)
rewards.append(reward)
next_states.append(next_state)
dones.append(done)
old_log_probs.append(log_prob)
old_state_values.append(state_value)
state = next_state
episode_reward += reward
if done:
break
# 更新策略
if len(states) > 0:
agent.update(states, actions, rewards, next_states, dones,
old_log_probs, old_state_values)
if episode % 100 == 0:
print(f"Episode {episode}, Reward: {episode_reward:.2f}")
print("PPO算法实现完成!")
这个完整的PPO实现包含了所有关键组件:Actor-Critic架构、概率比率裁剪、优势函数计算、多次更新等。实际应用中还需要根据具体任务调整超参数和网络结构。
4. 强化学习实战
强化学习在实际应用中需要考虑多个方面,包括环境设计、模型架构、训练策略、评估方法等。本节将详细介绍如何构建一个完整的强化学习系统。
4.1 模型创建
4.1.1 网络架构设计
在强化学习中,网络架构的设计对性能有重要影响。常见的架构包括:
1. 全连接网络(MLP)
适用于状态空间较小的任务,如经典控制问题。
import torch
import torch.nn as nn
import torch.nn.functional as F
class MLPNetwork(nn.Module):
def __init__(self, input_dim, hidden_dims, output_dim, activation='relu'):
super(MLPNetwork, self).__init__()
layers = []
prev_dim = input_dim
for hidden_dim in hidden_dims:
layers.append(nn.Linear(prev_dim, hidden_dim))
if activation == 'relu':
layers.append(nn.ReLU())
elif activation == 'tanh':
layers.append(nn.Tanh())
elif activation == 'leaky_relu':
layers.append(nn.LeakyReLU())
prev_dim = hidden_dim
layers.append(nn.Linear(prev_dim, output_dim))
self.network = nn.Sequential(*layers)
def forward(self, x):
return self.network(x)
# 使用示例
state_dim = 4
action_dim = 2
hidden_dims = [128, 128, 64]
# 创建策略网络
policy_net = MLPNetwork(state_dim, hidden_dims, action_dim)
print(f"策略网络参数数量: {sum(p.numel() for p in policy_net.parameters())}")
2. 卷积神经网络(CNN)
适用于图像输入的任务,如Atari游戏。
class CNNNetwork(nn.Module):
def __init__(self, input_channels, output_dim):
super(CNNNetwork, self).__init__()
self.conv_layers = nn.Sequential(
nn.Conv2d(input_channels, 32, kernel_size=8, stride=4),
nn.ReLU(),
nn.Conv2d(32, 64, kernel_size=4, stride=2),
nn.ReLU(),
nn.Conv2d(64, 64, kernel_size=3, stride=1),
nn.ReLU()
)
# 计算卷积层输出尺寸
self.conv_output_size = self._get_conv_output_size(input_channels)
self.fc_layers = nn.Sequential(
nn.Linear(self.conv_output_size, 512),
nn.ReLU(),
nn.Linear(512, output_dim)
)
def _get_conv_output_size(self, input_channels):
# 假设输入图像尺寸为84x84
dummy_input = torch.zeros(1, input_channels, 84, 84)
with torch.no_grad():
conv_output = self.conv_layers(dummy_input)
return conv_output.view(1, -1).size(1)
def forward(self, x):
conv_out = self.conv_layers(x)
conv_out = conv_out.view(conv_out.size(0), -1)
return self.fc_layers(conv_out)
# 使用示例
input_channels = 4 # 4帧堆叠
action_dim = 6 # Atari游戏的动作数
cnn_net = CNNNetwork(input_channels, action_dim)
print(f"CNN网络参数数量: {sum(p.numel() for p in cnn_net.parameters())}")
3. 循环神经网络(RNN/LSTM)
适用于序列决策任务,如自然语言处理或部分可观测环境。
class RNNNetwork(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim, num_layers=2):
super(RNNNetwork, self).__init__()
self.hidden_dim = hidden_dim
self.num_layers = num_layers
self.lstm = nn.LSTM(input_dim, hidden_dim, num_layers,
batch_first=True, dropout=0.1)
self.fc = nn.Linear(hidden_dim, output_dim)
def forward(self, x, hidden=None):
if hidden is None:
h0 = torch.zeros(self.num_layers, x.size(0), self.hidden_dim)
c0 = torch.zeros(self.num_layers, x.size(0), self.hidden_dim)
hidden = (h0, c0)
lstm_out, hidden = self.lstm(x, hidden)
# 取最后一个时间步的输出
output = self.fc(lstm_out[:, -1, :])
return output, hidden
# 使用示例
input_dim = 10
hidden_dim = 64
output_dim = 4
seq_length = 20
rnn_net = RNNNetwork(input_dim, hidden_dim, output_dim)
dummy_input = torch.randn(32, seq_length, input_dim) # batch_size=32
output, hidden = rnn_net(dummy_input)
print(f"RNN网络输出形状: {output.shape}")
4.1.2 模型初始化
正确的权重初始化对训练稳定性至关重要:
def init_weights(m):
"""初始化网络权重"""
if isinstance(m, nn.Linear):
# Xavier初始化
nn.init.xavier_uniform_(m.weight)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Conv2d):
# He初始化
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LSTM):
for name, param in m.named_parameters():
if 'weight' in name:
nn.init.xavier_uniform_(param)
elif 'bias' in name:
nn.init.constant_(param, 0)
# 应用权重初始化
policy_net.apply(init_weights)
cnn_net.apply(init_weights)
rnn_net.apply(init_weights)
4.1.3 模型保存与加载
import os
import json
class ModelManager:
def __init__(self, save_dir):
self.save_dir = save_dir
os.makedirs(save_dir, exist_ok=True)
def save_model(self, model, optimizer, epoch, loss, extra_info=None):
"""保存模型"""
save_path = os.path.join(self.save_dir, f"model_epoch_{epoch}.pth")
save_dict = {
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'epoch': epoch,
'loss': loss
}
if extra_info:
save_dict.update(extra_info)
torch.save(save_dict, save_path)
print(f"模型已保存到: {save_path}")
def load_model(self, model, optimizer, epoch):
"""加载模型"""
load_path = os.path.join(self.save_dir, f"model_epoch_{epoch}.pth")
if not os.path.exists(load_path):
print(f"模型文件不存在: {load_path}")
return None
checkpoint = torch.load(load_path)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
print(f"模型已从 {load_path} 加载")
return checkpoint
def save_config(self, config):
"""保存配置"""
config_path = os.path.join(self.save_dir, "config.json")
with open(config_path, 'w') as f:
json.dump(config, f, indent=2)
print(f"配置已保存到: {config_path}")
# 使用示例
model_manager = ModelManager("./models")
config = {
"state_dim": 4,
"action_dim": 2,
"learning_rate": 1e-3,
"batch_size": 64,
"gamma": 0.99
}
model_manager.save_config(config)
4.2 训练流程
4.2.1 环境设置
在强化学习实战中,环境设置是第一步也是至关重要的一步。通常,这一阶段包括环境初始化、状态空间定义、动作空间定义等。
import gym
import numpy as np
from gym import spaces
import matplotlib.pyplot as plt
class CustomEnvironment:
"""自定义环境示例"""
def __init__(self):
# 状态空间:4维连续状态
self.observation_space = spaces.Box(
low=-np.inf, high=np.inf, shape=(4,), dtype=np.float32
)
# 动作空间:2个离散动作
self.action_space = spaces.Discrete(2)
self.state = None
self.max_steps = 200
self.current_step = 0
def reset(self):
"""重置环境"""
self.state = np.random.uniform(-0.1, 0.1, 4)
self.current_step = 0
return self.state.copy()
def step(self, action):
"""执行动作"""
self.current_step += 1
# 简化的动力学模型
if action == 0: # 向左
self.state[0] += 0.1
else: # 向右
self.state[0] -= 0.1
# 计算奖励
reward = 1.0 if abs(self.state[0]) < 0.5 else -1.0
# 判断是否结束
done = (self.current_step >= self.max_steps or
abs(self.state[0]) > 2.0)
return self.state.copy(), reward, done, {}
def render(self):
"""可视化环境"""
print(f"Step: {self.current_step}, State: {self.state}")
# 使用Gym环境
def create_environment(env_name="CartPole-v1"):
"""创建Gym环境"""
env = gym.make(env_name)
print(f"环境: {env_name}")
print(f"状态空间: {env.observation_space}")
print(f"动作空间: {env.action_space}")
return env
# 环境测试
env = create_environment()
state = env.reset()
print(f"初始状态: {state}")
# 随机动作测试
for i in range(5):
action = env.action_space.sample()
next_state, reward, done, info = env.step(action)
print(f"动作: {action}, 奖励: {reward}, 完成: {done}")
if done:
break
env.close()
4.2.2 经验回放缓冲区
经验回放是深度强化学习中的重要技术,能够提高样本效率和训练稳定性:
import random
from collections import deque
class ReplayBuffer:
"""经验回放缓冲区"""
def __init__(self, capacity):
self.buffer = deque(maxlen=capacity)
self.capacity = capacity
def push(self, state, action, reward, next_state, done):
"""添加经验"""
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size):
"""随机采样批次"""
batch = random.sample(self.buffer, batch_size)
state, action, reward, next_state, done = map(np.stack, zip(*batch))
return state, action, reward, next_state, done
def __len__(self):
return len(self.buffer)
class PrioritizedReplayBuffer:
"""优先经验回放缓冲区"""
def __init__(self, capacity, alpha=0.6):
self.capacity = capacity
self.alpha = alpha
self.buffer = []
self.priorities = []
self.position = 0
def push(self, state, action, reward, next_state, done):
"""添加经验"""
max_priority = max(self.priorities) if self.priorities else 1.0
if len(self.buffer) < self.capacity:
self.buffer.append((state, action, reward, next_state, done))
self.priorities.append(max_priority)
else:
self.buffer[self.position] = (state, action, reward, next_state, done)
self.priorities[self.position] = max_priority
self.position = (self.position + 1) % self.capacity
def sample(self, batch_size, beta=0.4):
"""基于优先级采样"""
if len(self.buffer) == 0:
return None, None, None
# 计算采样概率
priorities = np.array(self.priorities[:len(self.buffer)])
probs = priorities ** self.alpha
probs /= probs.sum()
# 采样索引
indices = np.random.choice(len(self.buffer), batch_size, p=probs)
# 计算重要性采样权重
weights = (len(self.buffer) * probs[indices]) ** (-beta)
weights /= weights.max()
# 获取批次数据
batch = [self.buffer[idx] for idx in indices]
state, action, reward, next_state, done = map(np.stack, zip(*batch))
return (state, action, reward, next_state, done), indices, weights
def update_priorities(self, indices, priorities):
"""更新优先级"""
for idx, priority in zip(indices, priorities):
self.priorities[idx] = priority
def __len__(self):
return len(self.buffer)
# 使用示例
buffer = ReplayBuffer(capacity=10000)
prioritized_buffer = PrioritizedReplayBuffer(capacity=10000)
# 添加一些经验
for i in range(100):
state = np.random.randn(4)
action = np.random.randint(0, 2)
reward = np.random.randn()
next_state = np.random.randn(4)
done = np.random.choice([True, False])
buffer.push(state, action, reward, next_state, done)
prioritized_buffer.push(state, action, reward, next_state, done)
print(f"普通缓冲区大小: {len(buffer)}")
print(f"优先缓冲区大小: {len(prioritized_buffer)}")
# 采样测试
batch = buffer.sample(32)
print(f"采样批次大小: {len(batch[0])}")
prioritized_batch = prioritized_buffer.sample(32)
if prioritized_batch[0] is not None:
print(f"优先采样批次大小: {len(prioritized_batch[0][0])}")
4.2.3 训练循环
import time
from tqdm import tqdm
class Trainer:
"""强化学习训练器"""
def __init__(self, agent, env, buffer, config):
self.agent = agent
self.env = env
self.buffer = buffer
self.config = config
# 训练统计
self.episode_rewards = []
self.episode_lengths = []
self.losses = []
# 评估统计
self.eval_rewards = []
self.eval_episodes = 100
def train_episode(self):
"""训练一个回合"""
state = self.env.reset()
episode_reward = 0
episode_length = 0
for step in range(self.config['max_steps']):
# 选择动作
if len(self.buffer) < self.config['min_buffer_size']:
action = self.env.action_space.sample() # 随机动作
else:
action = self.agent.select_action(state, epsilon=self.config['epsilon'])
# 执行动作
next_state, reward, done, info = self.env.step(action)
# 存储经验
self.buffer.push(state, action, reward, next_state, done)
# 更新智能体
if len(self.buffer) >= self.config['min_buffer_size']:
loss = self.agent.update(self.buffer, self.config['batch_size'])
if loss is not None:
self.losses.append(loss)
state = next_state
episode_reward += reward
episode_length += 1
if done:
break
self.episode_rewards.append(episode_reward)
self.episode_lengths.append(episode_length)
return episode_reward, episode_length
def train(self, num_episodes):
"""训练多个回合"""
print(f"开始训练 {num_episodes} 个回合...")
for episode in tqdm(range(num_episodes)):
# 训练一个回合
reward, length = self.train_episode()
# 更新探索率
if self.config['epsilon'] > self.config['epsilon_min']:
self.config['epsilon'] *= self.config['epsilon_decay']
# 定期评估
if episode % self.config['eval_interval'] == 0:
eval_reward = self.evaluate()
self.eval_rewards.append(eval_reward)
print(f"回合 {episode}: 训练奖励={reward:.2f}, 评估奖励={eval_reward:.2f}")
# 定期保存模型
if episode % self.config['save_interval'] == 0:
self.agent.save_model(f"model_episode_{episode}.pth")
def evaluate(self):
"""评估智能体性能"""
total_rewards = []
for _ in range(self.eval_episodes):
state = self.env.reset()
episode_reward = 0
for _ in range(self.config['max_steps']):
action = self.agent.select_action(state, epsilon=0) # 贪婪策略
state, reward, done, _ = self.env.step(action)
episode_reward += reward
if done:
break
total_rewards.append(episode_reward)
return np.mean(total_rewards)
def plot_training_progress(self):
"""绘制训练进度"""
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
# 回合奖励
axes[0, 0].plot(self.episode_rewards)
axes[0, 0].set_title('Episode Rewards')
axes[0, 0].set_xlabel('Episode')
axes[0, 0].set_ylabel('Reward')
# 回合长度
axes[0, 1].plot(self.episode_lengths)
axes[0, 1].set_title('Episode Lengths')
axes[0, 1].set_xlabel('Episode')
axes[0, 1].set_ylabel('Length')
# 损失
if self.losses:
axes[1, 0].plot(self.losses)
axes[1, 0].set_title('Training Loss')
axes[1, 0].set_xlabel('Update Step')
axes[1, 0].set_ylabel('Loss')
# 评估奖励
if self.eval_rewards:
axes[1, 1].plot(self.eval_rewards)
axes[1, 1].set_title('Evaluation Rewards')
axes[1, 1].set_xlabel('Evaluation')
axes[1, 1].set_ylabel('Reward')
plt.tight_layout()
plt.show()
# 训练配置
config = {
'max_steps': 200,
'min_buffer_size': 1000,
'batch_size': 64,
'epsilon': 1.0,
'epsilon_min': 0.01,
'epsilon_decay': 0.995,
'eval_interval': 100,
'save_interval': 500
}
print("训练配置设置完成!")
4.3 评估方法
4.3.1 性能指标
强化学习系统的评估需要多个维度的指标:
import numpy as np
import matplotlib.pyplot as plt
from scipy import stats
import seaborn as sns
class PerformanceEvaluator:
"""强化学习性能评估器"""
def __init__(self):
self.metrics = {}
def calculate_basic_metrics(self, rewards, lengths):
"""计算基础性能指标"""
metrics = {
'mean_reward': np.mean(rewards),
'std_reward': np.std(rewards),
'median_reward': np.median(rewards),
'min_reward': np.min(rewards),
'max_reward': np.max(rewards),
'mean_length': np.mean(lengths),
'std_length': np.std(lengths),
'success_rate': np.mean([r > 0 for r in rewards]) # 假设正奖励表示成功
}
return metrics
def calculate_learning_metrics(self, rewards, window_size=100):
"""计算学习相关指标"""
if len(rewards) < window_size:
return {}
# 滑动平均
moving_avg = []
for i in range(window_size, len(rewards) + 1):
moving_avg.append(np.mean(rewards[i-window_size:i]))
# 学习曲线斜率
x = np.arange(len(moving_avg))
slope, intercept, r_value, p_value, std_err = stats.linregress(x, moving_avg)
# 收敛性分析
convergence_point = self._find_convergence_point(moving_avg)
metrics = {
'learning_slope': slope,
'learning_r_squared': r_value ** 2,
'convergence_episode': convergence_point,
'final_performance': moving_avg[-1] if moving_avg else 0,
'performance_improvement': moving_avg[-1] - moving_avg[0] if moving_avg else 0
}
return metrics
def _find_convergence_point(self, moving_avg, threshold=0.05):
"""找到收敛点"""
if len(moving_avg) < 50:
return len(moving_avg)
# 计算性能变化的相对标准差
recent_performance = moving_avg[-20:]
if len(recent_performance) < 20:
return len(moving_avg)
cv = np.std(recent_performance) / np.mean(recent_performance)
# 如果变异系数小于阈值,认为已收敛
if cv < threshold:
return len(moving_avg) - 20
return len(moving_avg)
def calculate_sample_efficiency(self, rewards, target_performance=0.8):
"""计算样本效率"""
if not rewards:
return {}
max_reward = np.max(rewards)
if max_reward == 0:
return {}
# 找到达到目标性能的回合
target_reward = target_performance * max_reward
episodes_to_target = None
for i, reward in enumerate(rewards):
if reward >= target_reward:
episodes_to_target = i + 1
break
metrics = {
'episodes_to_target': episodes_to_target,
'sample_efficiency': 1.0 / episodes_to_target if episodes_to_target else 0,
'target_performance': target_performance,
'target_reward': target_reward
}
return metrics
# 使用示例
evaluator = PerformanceEvaluator()
# 模拟一些实验结果
np.random.seed(42)
rewards = np.random.normal(100, 20, 1000)
lengths = np.random.normal(200, 50, 1000)
# 计算指标
basic_metrics = evaluator.calculate_basic_metrics(rewards, lengths)
learning_metrics = evaluator.calculate_learning_metrics(rewards)
sample_metrics = evaluator.calculate_sample_efficiency(rewards)
print("基础指标:", basic_metrics)
print("学习指标:", learning_metrics)
print("样本效率指标:", sample_metrics)
5. SERL系列:样本高效机器人强化学习
我们根据SERL系列回溯,下面是从最新的工作一路回溯,RLDG(24年12月) → HIL-SERL(24年10月) → SERL(24年1月底)/FMB(24年1月中旬) → RLPD(23年2月)。
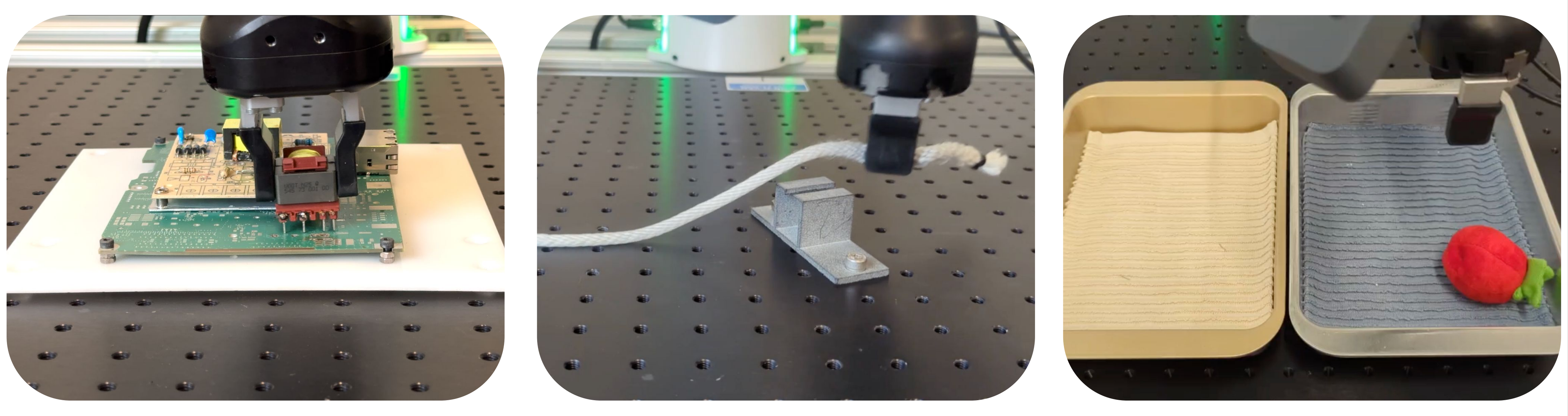
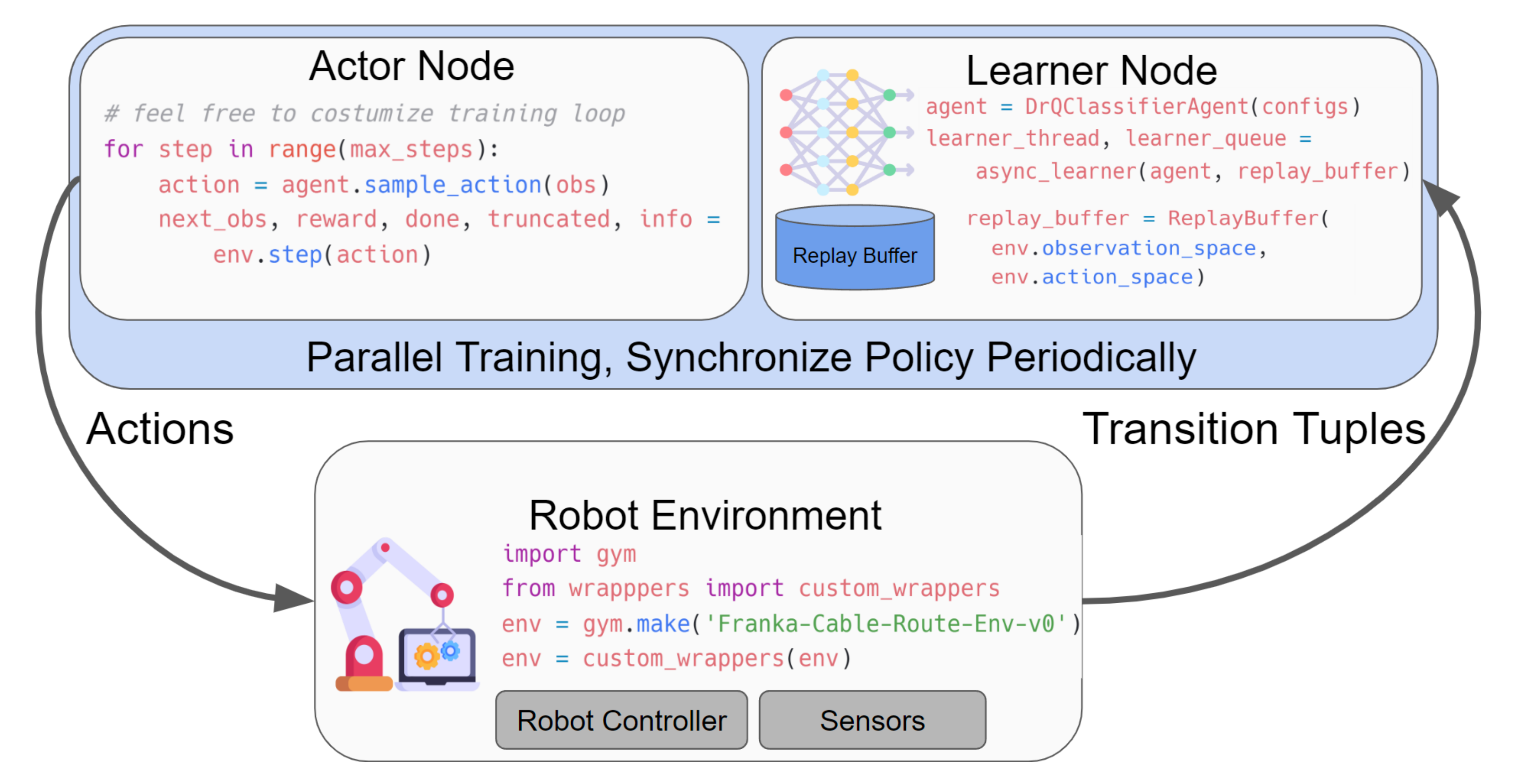
为满足“真机少样本、高可靠、可部署”的目标,SERL将高样本效率的离策略RL、基于视觉的奖励学习、自动重置与安全阻抗控制整合为一体,形成从感知到控制的闭环系统。下图展示了SERL在真实环境中的多任务表现(PCB插入、线缆布线、物体搬运)。
5.1 系统与方法总览
- 观测:多相机RGB(腕部/侧视)+ 本体感知(末端执行器位姿、力/力矩等)
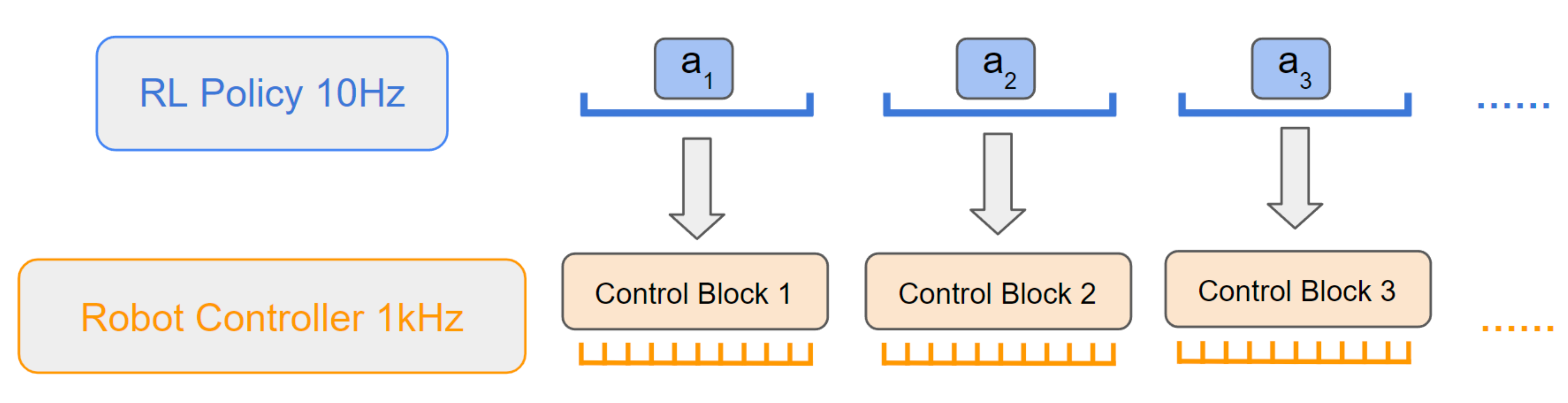
- 动作:以末端执行器坐标系输出6D扭转(相对坐标系,便于空间泛化)
- 算法:RLPD(基于SAC的高UTD离策略方法)+ 对称采样(先验/在线各50%)
- 奖励:二元分类器/VICE(从像素学习“成功”信号,兼容稀疏奖励)
- 控制:阻抗控制器(含参考限制),兼顾安全与精细接触
5.2 RLPD核心细节:对称采样与高UTD
RLPD在训练时以高UTD比重复利用数据,并在“先验数据(离线演示/历史数据)”与“在线RL数据”之间执行对称采样,有效提升样本效率与稳定性。
# 伪代码:RLPD训练步(对称采样 + 高UTD)
for env_step in range(num_env_steps):
transition = env.step(policy)
rl_buffer.add(transition)
for _ in range(utd_ratio):
batch_off = offline_buffer.sample(batch_size // 2)
batch_on = rl_buffer.sample(batch_size // 2)
batch = merge(batch_off, batch_on)
# Critic目标与损失(SAC风格)
with torch.no_grad():
a_next, logp_next = policy.sample(batch.s_next)
q_target = target_q(batch.s_next, a_next) - alpha * logp_next
y = batch.r + (1 - batch.done) * gamma * q_target
q_loss = F.mse_loss(q(batch.s, batch.a), y)
# Actor损失(熵正则)
a_new, logp = policy.sample(batch.s)
q_new = q(batch.s, a_new)
pi_loss = (alpha * logp - q_new).mean()
optimize(q_loss, pi_loss)
5.3 从像素学习奖励:二元分类器/VICE
对于难以手工设计奖励的真实任务,SERL使用“成功/失败”二分类器作为奖励模型,或采用VICE在训练中动态补充负样本以抑制“对抗性状态”。
import torch
import torch.nn as nn
class RewardClassifier(nn.Module):
def __init__(self, state_dim):
super().__init__()
self.net = nn.Sequential(
nn.Linear(state_dim, 256), nn.ReLU(),
nn.Linear(256, 256), nn.ReLU(),
nn.Linear(256, 1), nn.Sigmoid()
)
def forward(self, s):
return self.net(s)
@torch.no_grad()
def reward(self, s):
p_success = self.forward(s).clamp(1e-6, 1-1e-6)
return torch.log(p_success)
数据构成建议:正样本≈200帧、负样本≈1000帧(数分钟远程操作即可),离线训练达到>95%准确率后上线作为稀疏奖励;若出现“假阳性利用”,启用VICE迭代刷新负样本。
5.4 自动重置与相对坐标系
- 前向/后向策略:学习完成任务与回到起始态的双策略,减少人工复位成本
- 相对坐标系:观测与动作均以“末端执行器初始帧”为参照,模拟“目标在手中移动”,增强扰动/位姿变化下的泛化
# 相对位姿计算(示意):T_b0_bt = inv(T_b0) @ T_bt,
# 将相对位姿特征投给策略;动作在当前末端坐标系中生成
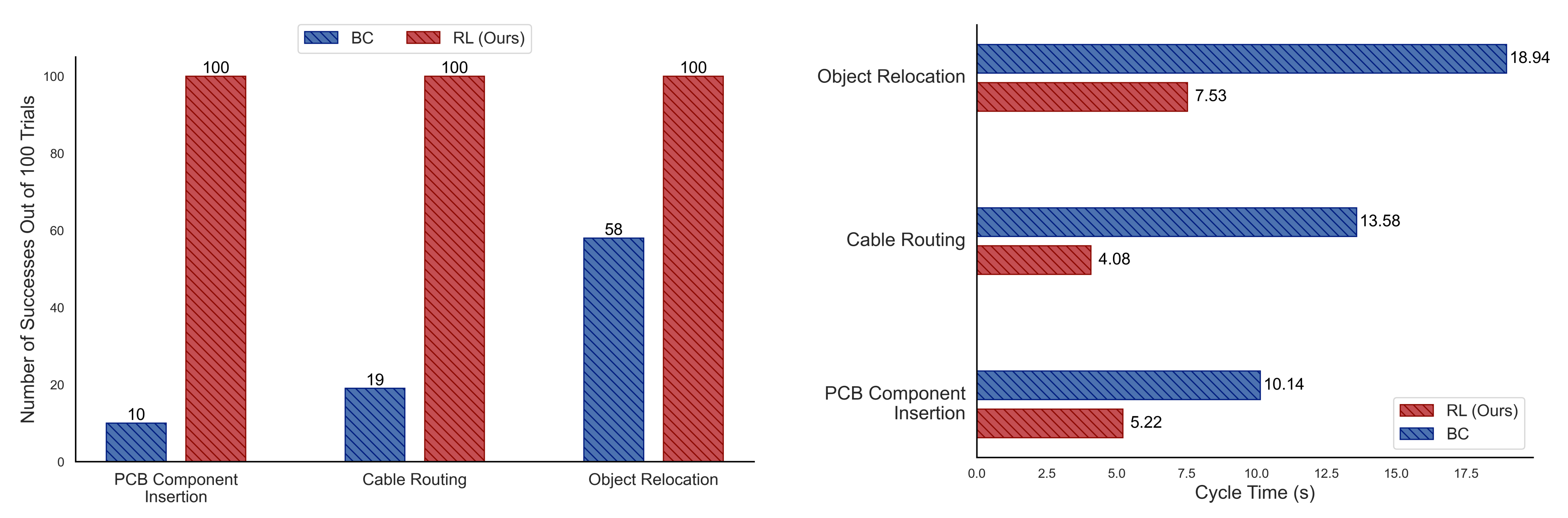
5.5 真实任务与指标
- 任务:PCB连接器插入、线缆布线、自由物体重定位等
- 结果:15–60分钟/策略即收敛,三类任务均可达接近100%成功率;周期时间较BC基线提升至约1.8×(更快)
- 关键对比:等量人类介入下,HIL-SERL(RL+纠正)成功率与效率显著优于HG-DAgger/BC/扩散策略
5.6 视觉骨干与多相机融合:鲁棒表征与轻量推理
在真实世界中,照明、反光、遮挡和动态背景都会干扰策略对关键几何关系的感知。实践中推荐采用“轻量主干 + 多视角特征对齐”的组合:以 ImageNet 预训练的 ResNet-10/18 作为主干,分别编码腕部与侧视相机图像,随后对多视角特征做通道级加权与空间级 ROI 对齐,再与本体感知特征拼接输入策略。这样既保证了推理延迟(10–20Hz 控制频率下的毫秒级前向)又维持了在插拔等精细操作中对接触前微位姿的分辨能力。训练时可引入颜色抖动、仿射扰动与 CutMix 以提升泛化。

# 简化版:多相机特征融合模块(PyTorch)
class MultiCamFusion(nn.Module):
def __init__(self, backbone: nn.Module, feat_dim: int = 256):
super().__init__()
self.backbone = backbone # 共享权重
self.channel_attn = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(feat_dim, feat_dim // 4, 1), nn.ReLU(),
nn.Conv2d(feat_dim // 4, feat_dim, 1), nn.Sigmoid()
)
self.roi_align = torchvision.ops.RoIAlign(output_size=(14,14), spatial_scale=1/8, sampling_ratio=2)
self.head = nn.Sequential(nn.Flatten(), nn.Linear(feat_dim*14*14, 512), nn.ReLU())
def forward(self, imgs, rois): # imgs: [B, V, C, H, W], rois: 每视角候选框
feats = []
for v in range(imgs.size(1)):
f = self.backbone(imgs[:, v]) # [B, feat_dim, h, w]
w = self.channel_attn(f)
f = f * w
f = self.roi_align(f, rois[v])
feats.append(f)
fused = torch.stack(feats, dim=1).mean(1)
return self.head(fused)
…详情请参照古月居
更多推荐
 20
20 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)