
【OpenClaw】通过Nanobot源码学习架构---(3)
0x00 概要
OpenClaw 应该有40万行代码,阅读理解起来难度过大,因此,本系列通过Nanobot来学习 OpenClaw 的特色。
Nanobot是由香港大学数据科学实验室(HKUDS)开源的超轻量级个人 AI 助手框架,定位为"Ultra-Lightweight OpenClaw"。非常适合学习Agent架构。
Agent 是“业务执行者”,解决“消息怎样变成模型调用、工具执行和最终回复”。它们具备独立的上下文(与主对话隔离)和可使用的特定工具,并且具备定义明确的角色和方法论。每次 Agent 收到消息时运行的核心推理周期如下:
- 从总线接收消息
- 组装上下文
- 推理该做什么(这是 LLM 调用)
- 根据决定行动(调用工具、执行命令)
- 观察结果,保存状态
- 判断:我完成了吗?还是再循环一次?
- 完成后回复
注:本系列借鉴的文章过多,可能在参考文献中有遗漏的文章,如果有,还请大家指出。
0x01 原理
1.1 Agent:负责“执行”
一个 Agent = 一个完整的 AI “大脑实例”,每个 Agent 都拥有独立资源。Agent 是“执行平面”,解决“消息怎样变成模型调用、工具执行和最终回复”。具体如下图(来自MiniClaw)。
Feishu Cloud
|
| HTTP POST /feishu/events
| (im.message.receive_v1)
v
[ESP32 Webhook Server :18790]
|
| message_bus_push_inbound()
v
[Message Bus] ──> [Agent Loop] ──> [Message Bus]
(Claude/GPT) |
| outbound dispatch
v
[feishu_send_message()]
|
| POST /im/v1/messages
v
Feishu API
下图是Agent 的最小循环。每个 AI Agent 都需要这个循环。模型决定何时调用工具、何时停止。代码只是执行模型的要求。
An agentic loop is the full “real” run of an agent: intake → context assembly → model inference → tool execution → streaming replies → persistence.
THE AGENT PATTERN
=================
User --> messages[] --> LLM --> response
|
stop_reason == "tool_use"?
/ \
yes no
| |
execute tools return text
append results
loop back -----------------> messages[]
1.2 Pi-Agent框架
OpenClaw所使用的引擎是Pi-Agent框架,它是一个仅有四个工具、系统提示词不到1000个token,秉持“精简至上”原则的AI编程Agent。与其他编程Agent相比,Pi的工程设计和决策机制极为简洁,形成了鲜明对比。
下图是 OpenClaw 的循环概要。
runEmbeddedPiAgent()
└── while (true) { // 主重试循环
├── 检查重试次数限制 (MAX_RUN_LOOP_ITERATIONS)
├── 调用 runEmbeddedAttempt() // 单次推理尝试
├── 处理 context overflow → 自动压缩
├── 处理 auth failure → profile轮换
├── 处理 timeout → 重试或报错
└── 成功则返回 payloads
}
Pi的设计理念可以总结为:不是为LLM打造一个复杂的“控制台”,而是给它一把“多功能小刀”——工具虽少但实用,提示虽简但明确,让模型的原生能力成为主导,而不是被框架的复杂性所掩盖。Pi 这种设计理念是基于一个关键事实——经过强化学习训练的前沿LLM模型,已经具备了很强的理解和执行能力。它们能明确知道“编码Agent”的主要任务是什么,根本不需要长篇大论的系统提示词和复杂的辅助模块来“指导”它们工作。
从数据层面分析:Pi的系统提示词加上工具定义,总长度还不到1000个token,仅仅是Claude Code的十分之一;内置工具也只有4个,远少于同类产品。这说明,Pi在主流Agent都在强化的方面,几乎都做了简化:
- 系统提示词简短明了
- 内置工具数量精简
- 没有复杂的规划模式和多代理通信协议(Plan Mode和MCP)支持
- 更没有难以监控的子Agent
Pi的核心策略是:去除冗余辅助模块,让LLM模型发挥核心作用,用最简洁的结构实现最核心的功能。
或许有人会问:如此简单的设计,真的能应对复杂的编码任务吗?实际上,Pi的简洁并非“简陋”,而是“精准”。接下来,我们详细解析这4个内置工具的设计思路——read、write、edit、bash:
| 工具 | 主要功能 |
|---|---|
read |
读取文件、审查代码、获取上下文信息 |
write |
创建文件、写入内容 |
edit |
修改代码、进行增量更新 |
bash |
执行命令、操作环境、通过自我调用来拆分任务 |
这四个工具几乎涵盖了编码Agent的所有核心需求。特别是bash工具的引入,既实现了复杂任务的拆分和执行,保证了功能的完整性,又避免了引入子Agent可能带来的不可预测性和监控难题——这就是Pi敢于放弃子Agent架构的原因。
同时,Pi使用简短的系统提示词,并非降低了对LLM的引导标准,而是充分信任前沿LLM的能力。正如Mario Zechner所倡导的:与其用大量token去“教导”LLM如何成为Agent,不如用简洁的提示词明确其核心任务,让LLM充分发挥自身的理解和执行能力。
这种设计思路带来了三大好处:
- 节省上下文空间——降低推理成本,提高运行效率
- 行为更加灵活自主——LLM能根据实际情况动态调整策略,不受冗长规则限制
- 更好的适应性——简洁的结构意味着更低的认知负担和更强的泛化能力
0x02 AgentLoop
AgentLoop 是nanobot Agent运行的核心。智能体循环是区分聊天机器人和智能体的关键。
2.1 架构
AgentLoop 类的架构如下:
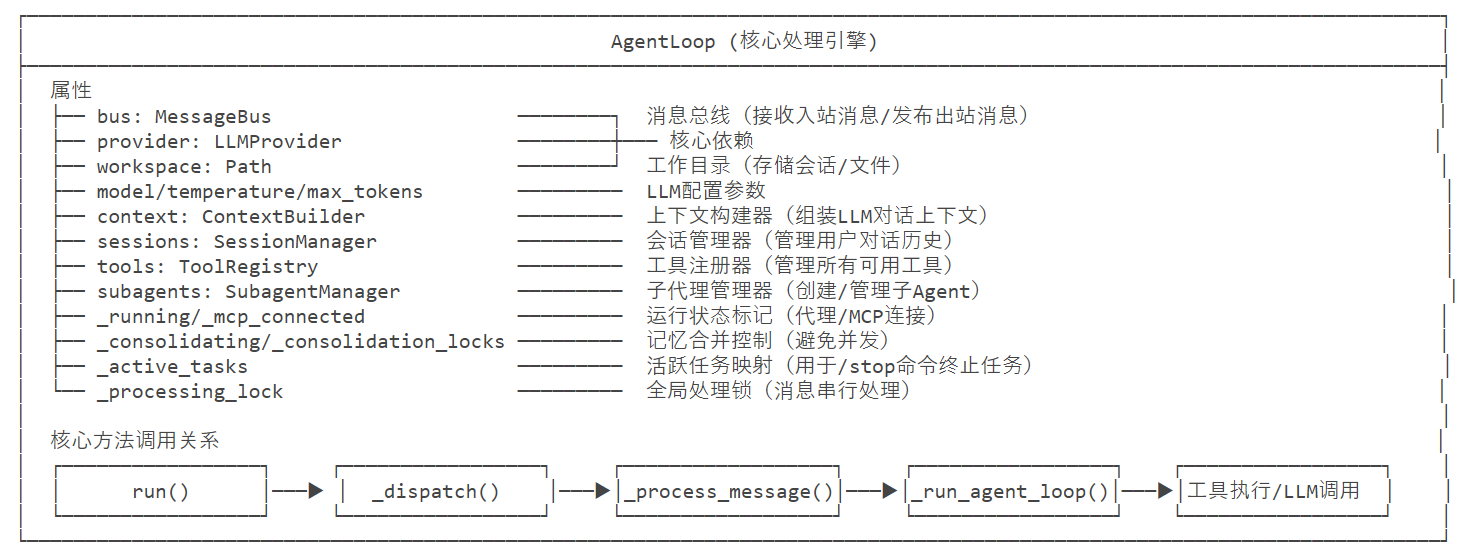
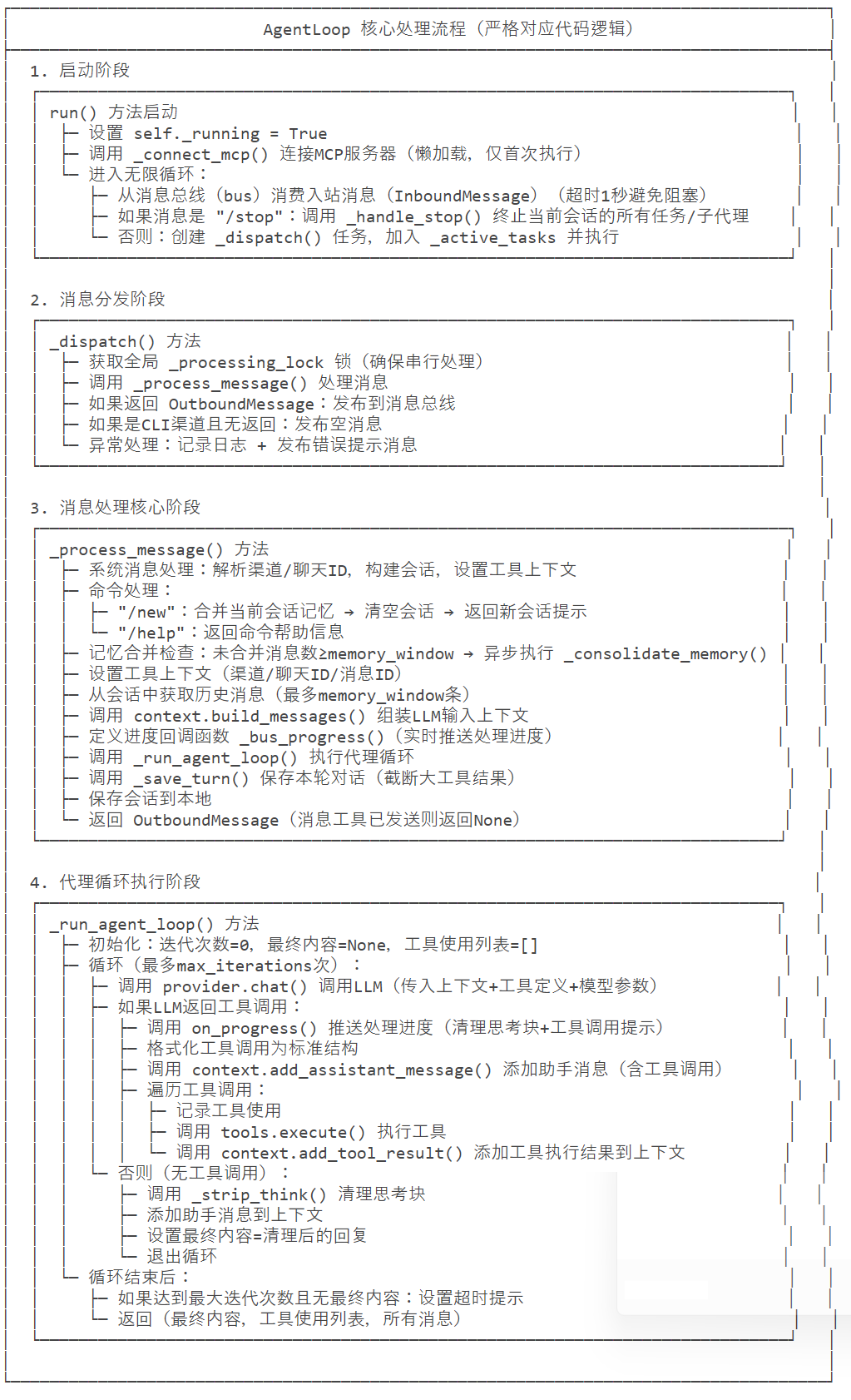
2.2 流程
下面是一个 AI Agent(智能体)的消息处理流程图,展示了从消息接收到响应发送的完整链路,包括 LLM 交互、工具调用循环等核心机制。
入口:消息到达(InboundMessage)
↓
AgentLoop.run() - 监听并接收消息
↓
AgentLoop._dispatch() - 分派处理
↓
AgentLoop._process_message() - 主要处理逻辑
↓
ContextBuilder.build_messages() - 构建上下文
↓
AgentLoop._run_agent_loop() - 核心代理循环
↓
Provider.chat() - LLM交互
↓
← 判断是否有工具调用
↓ 否
← 返回最终内容
↓ 是
← 执行工具调用
↓
ContextBuilder.add_tool_result() - 添加工具结果
↓
← 继续循环直到没有更多工具调用
↓
AgentLoop._save_turn() - 保存交互记录
↓
通过MessageBus发布OutboundMessage - 发送响应
部分环节详细拆解如下
2.3 定义和初始化
AgentLoop 的定义和初始化代码如下
class AgentLoop:
"""
The agent loop is the core processing engine.
It:
1. Receives messages from the bus
2. Builds context with history, memory, skills
3. Calls the LLM
4. Executes tool calls
5. Sends responses back
"""
def __init__(
self,
bus: MessageBus, # 消息总线,用于接收/发送消息
provider: LLMProvider, # LLM提供者(如OpenAI/本地模型)
workspace: Path, # Agent工作目录,用于隔离文件操作
model: str | None = None, # 使用的LLM模型名称
max_iterations: int = 40, # Agent最大迭代次数(防止无限循环)
temperature: float = 0.1, # LLM温度参数(越低越确定)
max_tokens: int = 4096, # LLM最大生成Token数
memory_window: int = 100, # 记忆窗口大小(会话历史最大条数)
brave_api_key: str | None = None, # Brave搜索API密钥(用于网页搜索工具)
exec_config: ExecToolConfig | None = None, # 命令执行工具配置
cron_service: CronService | None = None, # 定时任务服务(可选)
restrict_to_workspace: bool = False, # 是否限制Agent仅操作工作区
session_manager: SessionManager | None = None, # 会话管理器(可选)
mcp_servers: dict | None = None, # MCP服务器配置(可选)
channels_config: ChannelsConfig | None = None, # 通道配置(可选)
):
# 解决循环导入问题:仅运行时导入ExecToolConfig
from nanobot.config.schema import ExecToolConfig
# 基础属性初始化
self.bus = bus # 消息总线实例
self.channels_config = channels_config # 通道配置
self.provider = provider # LLM提供者实例
self.workspace = workspace # 工作目录路径
# 模型名称:优先传入值,否则使用LLM提供者默认模型
self.model = model or provider.get_default_model()
self.max_iterations = max_iterations # 最大迭代次数
self.temperature = temperature # LLM温度
self.max_tokens = max_tokens # LLM最大Token数
self.memory_window = memory_window # 记忆窗口大小
self.brave_api_key = brave_api_key # Brave API密钥
# 执行工具配置:默认空配置
self.exec_config = exec_config or ExecToolConfig()
self.cron_service = cron_service # 定时任务服务
self.restrict_to_workspace = restrict_to_workspace # 工作区限制开关
# 核心组件初始化
self.context = ContextBuilder(workspace) # 上下文构建器:构建LLM输入上下文
# 会话管理器:优先传入实例,否则创建新实例
self.sessions = session_manager or SessionManager(workspace)
self.tools = ToolRegistry() # 工具注册表:管理所有可用工具
# 子Agent管理器:用于生成子Agent处理子任务
self.subagents = SubagentManager(
provider=provider,
workspace=workspace,
bus=bus,
model=self.model,
temperature=self.temperature,
max_tokens=self.max_tokens,
brave_api_key=brave_api_key,
exec_config=self.exec_config,
restrict_to_workspace=restrict_to_workspace,
)
# 运行状态与资源管理属性
self._running = False # Agent循环是否运行
self._mcp_servers = mcp_servers or {} # MCP服务器配置
self._mcp_stack: AsyncExitStack | None = None # MCP连接上下文栈
self._mcp_connected = False # MCP是否已连接
self._mcp_connecting = False # MCP是否正在连接
self._consolidating: set[str] = set() # 正在进行记忆合并的会话Key集合
self._consolidation_tasks: set[asyncio.Task] = set() # 记忆合并任务集合
self._consolidation_locks: dict[str, asyncio.Lock] = {} # 会话记忆合并锁
self._active_tasks: dict[str, list[asyncio.Task]] = {} # 活跃任务:session_key -> 任务列表
self._processing_lock = asyncio.Lock() # 全局消息处理锁(防止并发冲突)
self._register_default_tools() # 注册默认工具
def _register_default_tools(self) -> None:
"""Register the default set of tools. 注册默认工具集"""
# 确定文件工具的允许目录:如果限制工作区则为工作目录,否则为None(无限制)
allowed_dir = self.workspace if self.restrict_to_workspace else None
# 注册文件系统工具:读/写/编辑/列目录
for cls in (ReadFileTool, WriteFileTool, EditFileTool, ListDirTool):
self.tools.register(cls(workspace=self.workspace, allowed_dir=allowed_dir))
# 注册命令执行工具
self.tools.register(ExecTool(
working_dir=str(self.workspace), # 工作目录
timeout=self.exec_config.timeout, # 执行超时时间
restrict_to_workspace=self.restrict_to_workspace, # 工作区限制
path_append=self.exec_config.path_append, # 环境变量PATH追加
))
# 注册网页相关工具:搜索/爬取
self.tools.register(WebSearchTool(api_key=self.brave_api_key))
self.tools.register(WebFetchTool())
# 注册消息发送工具:回调函数为消息总线发布出站消息
self.tools.register(MessageTool(send_callback=self.bus.publish_outbound))
# 注册子Agent生成工具
self.tools.register(SpawnTool(manager=self.subagents))
# 如果有定时任务服务,注册定时任务工具
if self.cron_service:
self.tools.register(CronTool(self.cron_service))
async def _connect_mcp(self) -> None:
"""Connect to configured MCP servers (one-time, lazy). 连接MCP服务器(懒加载,仅一次)"""
# 跳过条件:已连接/正在连接/无MCP配置
if self._mcp_connected or self._mcp_connecting or not self._mcp_servers:
return
self._mcp_connecting = True # 标记为正在连接
from nanobot.agent.tools.mcp import connect_mcp_servers # 延迟导入MCP连接函数
try:
# 创建异步上下文栈,用于管理MCP连接资源
self._mcp_stack = AsyncExitStack()
await self._mcp_stack.__aenter__() # 进入上下文栈
# 连接MCP服务器,将工具注册到MCP
await connect_mcp_servers(self._mcp_servers, self.tools, self._mcp_stack)
self._mcp_connected = True # 标记为已连接
except Exception as e:
# 连接失败:记录日志,下次消息处理时重试
logger.error("Failed to connect MCP servers (will retry next message): {}", e)
if self._mcp_stack:
try:
await self._mcp_stack.aclose() # 关闭上下文栈
except Exception:
pass
self._mcp_stack = None
finally:
self._mcp_connecting = False # 清除正在连接标记
def _set_tool_context(self, channel: str, chat_id: str, message_id: str | None = None) -> None:
"""Update context for all tools that need routing info. 更新需要路由信息的工具上下文"""
# 消息工具:设置通道/聊天ID/消息ID(用于消息发送路由)
if message_tool := self.tools.get("message"):
if isinstance(message_tool, MessageTool):
message_tool.set_context(channel, chat_id, message_id)
# 子Agent生成工具:设置通道/聊天ID
if spawn_tool := self.tools.get("spawn"):
if isinstance(spawn_tool, SpawnTool):
spawn_tool.set_context(channel, chat_id)
# 定时任务工具:设置通道/聊天ID
if cron_tool := self.tools.get("cron"):
if isinstance(cron_tool, CronTool):
小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)